Traffic light in the garage. Present
It was drizzling and nasty. The mood was vile.
He was lying on the side of the road and quietly rusting. Nearby on a pillar a young fellow sparkled with lights.
I stopped and put it in the trunk.
I am no longer alone.
And he is not alone.
He brought it to the country, dismantled it, washed it from dirt and painted it from a spray can.
The application was found immediately. The new car turned out to be wider than the previous one and parking in the garage became more problematic. All sorts of “bells on the strings” are not for us. So - stationary parking sensors.
1. Widespread ultrasonic sensors HC-SR04. 2 pieces, one for each wall. The Internet is full of information about them. Description below.
Ultrasonic Ranging Module HC - SR04
Ultrasonic ranging module HC - SR04 provides 2cm - 400cm non-contact measurement function, the ranging accuracy can reach to 3mm. The modules includes ultrasonic transmitters, receiver and control circuit. The basic principle of work:
Using IO trigger for at least 10us high level signal.
The Module automatically sends eight 40 kHz and detect whether there is a pulse signal back.
IF the signal back, through high level, time of high output IO duration is the time from sending ultrasonic to returning.
Test distance = (high level time × velocity of sound (340M / S) / 2
5V Supply
Trigger Pulse Input
Echo Pulse Output
0V Ground
Working Voltage DC 5 V
Working Current 15mA
Working Frequency 40Hz
Max Range 4m
Min Range 2cm
Measuring Angle 15 degree
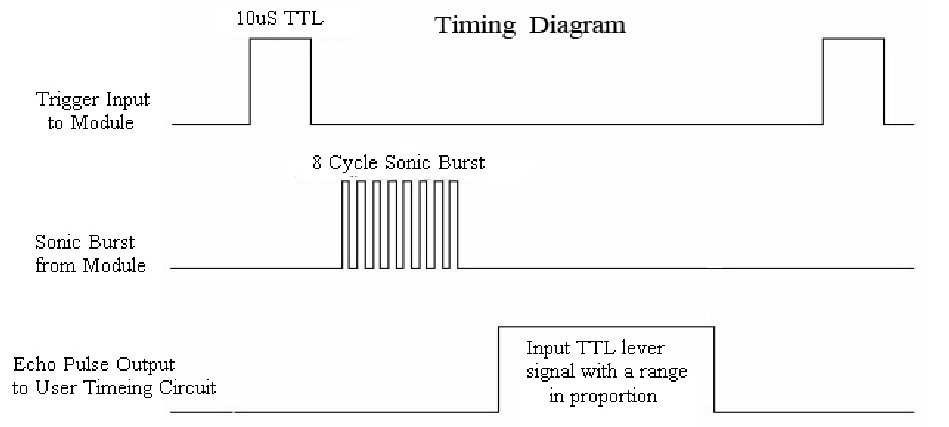
Trigger Input Signal 10uS TTL pulse
Echo Output Signal Input TTL lever signal and the range in proportion
Dimension 45 * 20 * 15mm

The Timing diagram is shown below. You only need to supply a short 10uS pulse to the trigger input to start the ranging, and then the module will send out an 8 cycle burst of ultrasound at 40 kHz and raise its echo. The Echo is a distance object that is pulse width and the range in proportion. You can calculate the range through the time interval between sending trigger signal and receiving echo signal. Formula: uS / 58 = centimeters or uS / 148 = inch; or: the range = high-level time * velocity (340M / S) / 2; we suggest to use over 60ms measurement cycle, in order to prevent trigger signal to the echo signal.
Fastened to the side walls at the entrance to the garage using galvanized sheet strips. The mount should allow you to adjust the sensors "in place" depending on the size of the car (height, hood width, wing shape ...).

2. The controller is PIC16f84a. Why this one:
a) I have them;
b) it has 2 I / O ports, a total of 13 bits, just as much as necessary. 3 pcs. - traffic light control (Red - Yellow - Green), 6pcs. - left and right LEDs (K-Zh-Z), 2pcs. - location pulse (Trig) on the left and right sensors, 2pcs. - reflected pulse (Echo) from the left and right sensors.
3. Two three-color LEDs, one for each wall. LEDs Red - Yellow - Green not found. Maybe they do not exist, but maybe I was looking badly. Therefore, the role of yellow in LEDs is played by blue. For complete identity, of course, separate LEDs could be used. And there would be no yellow problems. But I considered such a compromise acceptable.

4. Traffic light control units. 3pcs., One for each lamp.
The control unit for turning on / off the TV is ideal.

It consists of a low-power power transformer (220 to 7 volts), a diode rectifier, a stabilizer on KP142EN5x (or an analog), a transistor switch and a relay. When a logical “1” is applied to the input, the key is opened, the relay is activated and 220v is output. In addition, since KREN provides stabilized 5v, it is reasonable to power the microcontroller from one of these units. They are full on any radio market. If someone annoys the clicking of a relay, it is easy to make a thyristor circuit.
5. Quartz resonator at 4 MHz.
This is a very convenient frequency for those microcontrollers that I have. Easy to read time parameters. The period of clock pulses = 250ns, the machine cycle consists of four clock cycles, therefore, equal to 1 µs. Commands in RISC controllers are executed in 1 or 2 machine cycles, so there is no problem calculating the time that elapses "from how ... to before". You can use another within the permissible frequencies, but you will have to recount the timeouts. This is a very small problem.
6. Several resistors and capacitors recommended by the typical PIC16f84a switching circuit and two current-limiting resistors for LEDs. For example, look here: link .
General view of the assembled device:


Board with a microcontroller:

Simple, almost linear. On power-up, a hardware test is performed. Allegedly a test, more for beauty. At intervals of 1 second, red-yellow-green are switched, then at the same interval all the traffic lights turn on three times. After that - the transition to an endless cycle of polling the left and right channels. When each channel passes, depending on the result, the corresponding PORTB bit (flag) is set and one of the LEDs for this channel is turned on. At the end of the full cycle, the state of the Red-Yellow-Green flags of both channels is analyzed and, based on this, the corresponding traffic light is switched on. The truth table looks like this:
Any channel is Red . Traffic Light - Red .
Both channels Green. Traffic Light - Green .
All other cases. Traffic Light - Yellow .
In a few words, the core of the algorithm "in steps":
1. We form the impulse Trig;
2. We expect the arrival of a response pulse Echo;
3. Run the timeout 1ms;
4. After the timeout expires, we check to see if there is another “log.1” at the input of Echo;
5. If not, then we are at a dangerous approximation to the sensor of the corresponding channel. Turn on the red flag of this channel and go to another channel;
6. If Echo is still there, repeat steps 3 and 4;
7. If not, then we are at an average distance from the sensor. Turn on the yellow flag and go to another channel;
8. If Echo is still there, then we are far away. We are waiting for its end, turn on the green flag and go to another channel.

What is the point? We do not need to calculate the exact distance to the object. That is, it is not necessary to divide the pulse width of Echo by 58, as indicated in the description of the sensor. We are not building a rangefinder. We only need to know the position of the object with respect to two identical ranges of distances from the object to the sensor. For this, a 1ms timeout is used (see clause 3), which ultimately gives: 1000µs: 58 = 17cm. So - closer than 17cm - red, from 17 to 34cm - yellow, then 34cm - green. By changing the constants in the “Pause 1ms” subroutine, you can vary the distance depending on the size of the car, the width of the gate and driving skills.
The firmware listing is below. Assembler. Constants, except for those in timeouts, are in the binary system, since the device is bit-oriented. And when debugging or analyzing, you would still have to translate it into a binary system. The program uses Watchdog Timer to prevent freezes.
The author expresses gratitude to his wife, who during real trials fearlessly stood at the garage door and ensured that the author did not drive either the left or right wing of the car into the wall at the entrance. If there are fearless followers who want to repeat the project, the author will answer everyone.
He was lying on the side of the road and quietly rusting. Nearby on a pillar a young fellow sparkled with lights.
I stopped and put it in the trunk.
I am no longer alone.
And he is not alone.
He brought it to the country, dismantled it, washed it from dirt and painted it from a spray can.
The application was found immediately. The new car turned out to be wider than the previous one and parking in the garage became more problematic. All sorts of “bells on the strings” are not for us. So - stationary parking sensors.
Equipment
1. Widespread ultrasonic sensors HC-SR04. 2 pieces, one for each wall. The Internet is full of information about them. Description below.
Ultrasonic Ranging Module HC - SR04
Product features:
Ultrasonic ranging module HC - SR04 provides 2cm - 400cm non-contact measurement function, the ranging accuracy can reach to 3mm. The modules includes ultrasonic transmitters, receiver and control circuit. The basic principle of work:
Using IO trigger for at least 10us high level signal.
The Module automatically sends eight 40 kHz and detect whether there is a pulse signal back.
IF the signal back, through high level, time of high output IO duration is the time from sending ultrasonic to returning.
Test distance = (high level time × velocity of sound (340M / S) / 2
Wire connecting direct as following:
5V Supply
Trigger Pulse Input
Echo Pulse Output
0V Ground
Electric parameter
Working Voltage DC 5 V
Working Current 15mA
Working Frequency 40Hz
Max Range 4m
Min Range 2cm
Measuring Angle 15 degree
Trigger Input Signal 10uS TTL pulse
Echo Output Signal Input TTL lever signal and the range in proportion
Dimension 45 * 20 * 15mm
Timing diagram
The Timing diagram is shown below. You only need to supply a short 10uS pulse to the trigger input to start the ranging, and then the module will send out an 8 cycle burst of ultrasound at 40 kHz and raise its echo. The Echo is a distance object that is pulse width and the range in proportion. You can calculate the range through the time interval between sending trigger signal and receiving echo signal. Formula: uS / 58 = centimeters or uS / 148 = inch; or: the range = high-level time * velocity (340M / S) / 2; we suggest to use over 60ms measurement cycle, in order to prevent trigger signal to the echo signal.
Fastened to the side walls at the entrance to the garage using galvanized sheet strips. The mount should allow you to adjust the sensors "in place" depending on the size of the car (height, hood width, wing shape ...).
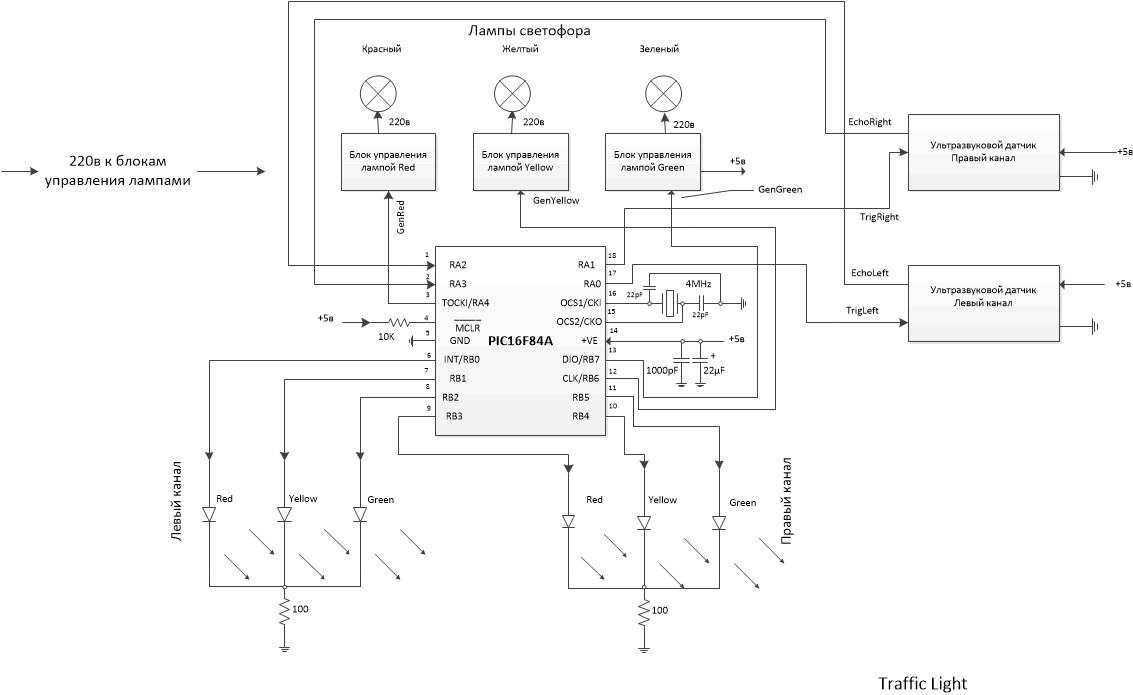
2. The controller is PIC16f84a. Why this one:
a) I have them;
b) it has 2 I / O ports, a total of 13 bits, just as much as necessary. 3 pcs. - traffic light control (Red - Yellow - Green), 6pcs. - left and right LEDs (K-Zh-Z), 2pcs. - location pulse (Trig) on the left and right sensors, 2pcs. - reflected pulse (Echo) from the left and right sensors.
3. Two three-color LEDs, one for each wall. LEDs Red - Yellow - Green not found. Maybe they do not exist, but maybe I was looking badly. Therefore, the role of yellow in LEDs is played by blue. For complete identity, of course, separate LEDs could be used. And there would be no yellow problems. But I considered such a compromise acceptable.
4. Traffic light control units. 3pcs., One for each lamp.
The control unit for turning on / off the TV is ideal.
It consists of a low-power power transformer (220 to 7 volts), a diode rectifier, a stabilizer on KP142EN5x (or an analog), a transistor switch and a relay. When a logical “1” is applied to the input, the key is opened, the relay is activated and 220v is output. In addition, since KREN provides stabilized 5v, it is reasonable to power the microcontroller from one of these units. They are full on any radio market. If someone annoys the clicking of a relay, it is easy to make a thyristor circuit.
5. Quartz resonator at 4 MHz.
This is a very convenient frequency for those microcontrollers that I have. Easy to read time parameters. The period of clock pulses = 250ns, the machine cycle consists of four clock cycles, therefore, equal to 1 µs. Commands in RISC controllers are executed in 1 or 2 machine cycles, so there is no problem calculating the time that elapses "from how ... to before". You can use another within the permissible frequencies, but you will have to recount the timeouts. This is a very small problem.
6. Several resistors and capacitors recommended by the typical PIC16f84a switching circuit and two current-limiting resistors for LEDs. For example, look here: link .
General view of the assembled device:
Board with a microcontroller:
Circuit diagram
Algorithm
Simple, almost linear. On power-up, a hardware test is performed. Allegedly a test, more for beauty. At intervals of 1 second, red-yellow-green are switched, then at the same interval all the traffic lights turn on three times. After that - the transition to an endless cycle of polling the left and right channels. When each channel passes, depending on the result, the corresponding PORTB bit (flag) is set and one of the LEDs for this channel is turned on. At the end of the full cycle, the state of the Red-Yellow-Green flags of both channels is analyzed and, based on this, the corresponding traffic light is switched on. The truth table looks like this:
Any channel is Red . Traffic Light - Red .
Both channels Green. Traffic Light - Green .
All other cases. Traffic Light - Yellow .
In a few words, the core of the algorithm "in steps":
1. We form the impulse Trig;
2. We expect the arrival of a response pulse Echo;
3. Run the timeout 1ms;
4. After the timeout expires, we check to see if there is another “log.1” at the input of Echo;
5. If not, then we are at a dangerous approximation to the sensor of the corresponding channel. Turn on the red flag of this channel and go to another channel;
6. If Echo is still there, repeat steps 3 and 4;
7. If not, then we are at an average distance from the sensor. Turn on the yellow flag and go to another channel;
8. If Echo is still there, then we are far away. We are waiting for its end, turn on the green flag and go to another channel.
What is the point? We do not need to calculate the exact distance to the object. That is, it is not necessary to divide the pulse width of Echo by 58, as indicated in the description of the sensor. We are not building a rangefinder. We only need to know the position of the object with respect to two identical ranges of distances from the object to the sensor. For this, a 1ms timeout is used (see clause 3), which ultimately gives: 1000µs: 58 = 17cm. So - closer than 17cm - red, from 17 to 34cm - yellow, then 34cm - green. By changing the constants in the “Pause 1ms” subroutine, you can vary the distance depending on the size of the car, the width of the gate and driving skills.
Firmware
The firmware listing is below. Assembler. Constants, except for those in timeouts, are in the binary system, since the device is bit-oriented. And when debugging or analyzing, you would still have to translate it into a binary system. The program uses Watchdog Timer to prevent freezes.
Listing
list p=16F84A ; list directive to define processor
#include ; processor specific variable definitions
__CONFIG _CP_OFF & _WDT_ON & _PWRTE_ON & _XT_OSC
;********************** Contact Assignment *****************************
; Contact # Name Function
; 17 RA0 output TrigLeft
; 18 RA1 output TrigRight
; 01 RA2 input EchoLeft
; 02 RA3 input EchoRight
; 03 RA4 output GenRed
; 06 RB0 output RedLeft
; 07 RB1 output YellowLeft
; 08 RB2 output GreenLeft
; 09 RB3 output RedRight
; 10 RB4 output YellowRight
; 11 RB5 output GreenRight
; 12 RB6 output GenYellow
; 13 RB7 output GenGreen
;
;******************* Constants **************************
; Red 00000001 Left channel
; Yellow 00000010 Left channel
; Green 00000100 Left channel
;
; Red 00001000 Right channel
; Yellow 00010000 Right channel
; Green 00100000 Right channel
;***** VARIABLE DEFINITIONS *****************************
CBLOCK 0x0C
Reg_1 ; 0x0C use within Pause subroutine
Reg_2 ; 0x0D use within Pause subroutine
Reg_3 ; 0x0E use within Pause subroutine
ENDC
#define bank0 bcf STATUS,RP0 ; set bank0
#define bank1 bsf STATUS,RP0 ; set bank1
#define TrigLeft_1 bsf PORTA,0 ; set Trigleft
#define TrigLeft_0 bcf PORTA,0 ; clean Trigleft
#define TrigRight_1 bsf PORTA,1 ; set Trigright
#define TrigRight_0 bcf PORTA,1 ; clean Trigright
#define EchoLeft PORTA,2
#define EchoRight PORTA,3
#define RedLeft b'00000001
#define YellowLeft b'00000010
#define GreenLeft b'00000100
#define RedRight b'00001000
#define YellowRight b'00010000
#define GreenRight b'00100000
;**********************************************************************
ORG 0x000 ; processor reset vector
goto main ; go to beginning of program
;----------------------------------------------------------------------
;------------------ SUBROUTINE Pulse --------
;delay = 10 machine cycles = 10 µs
Pulse movlw .3
movwf Reg_1
wr0 decfsz Reg_1,F
goto wr0
return
;------------------ SUBROUTINE Pause 1ms --------
;delay = 1'000 machine cycles
Pause movlw .75
movwf Reg_1
movlw .3
movwf Reg_2
wr1 decfsz Reg_1,F
goto wr1
clrwdt
decfsz Reg_2,F
goto wr1
nop
return
;-------------------- SUBROUTINE Pause 1sec ---
;delay = 1'000'000 machine cycles
Pause1 movlw .254
movwf Reg_1
movlw .17
movwf Reg_2
movlw .6
movwf Reg_3
wr2 decfsz Reg_1,F
goto wr2
clrwdt
decfsz Reg_2,F
goto wr2
decfsz Reg_3,F
goto wr2
nop
nop
return
;-------------------- SUBROUTINE Pause 50ms --------
;delay = 50'000 machine cycles
Pause2 movlw .216
movwf Reg_1
movlw .65
movwf Reg_2
wr3 decfsz Reg_1,F
goto wr3
clrwdt
decfsz Reg_2,F
goto wr3
return
;--------------------- SUBROUTINE General Red ---------------
GenRed bsf PORTA,4
bcf PORTB,6
bcf PORTB,7
return
;--------------------- SUBROUTINE General Green -------------
GenGreen bsf PORTB,7
bcf PORTA,4
bcf PORTB,6
return
;--------------------- SUBROUTINE General Yellow ------------
GenYellow bsf PORTB,6
bcf PORTA,4
bcf PORTB,7
return
;--------------------- SUBROUTINE General All ------------
GenAll bsf PORTA,4
bsf PORTB,6
bsf PORTB,7
return
;---------------------------------------------------------
main
bank1 ; set Bank 1
movlw 0x00
movwf TRISB ; PORTB - out
movlw b'00001100
movwf TRISA ; RA2,RA3 - input; RA0,RA1,RA4 - output
bank0 ; return to Bank 0
clrf PORTA
clrf PORTB ; turn off all lights
;---------------------- TEST -----------------------------
call GenRed
call Pause1
call GenYellow
call Pause1
call GenGreen
call Pause1
bcf PORTA,4
bcf PORTB,6
bcf PORTB,7
call Pause1
call GenAll
call Pause1
bcf PORTA,4
bcf PORTB,6
bcf PORTB,7
call Pause1
call GenAll
call Pause1
bcf PORTA,4
bcf PORTB,6
bcf PORTB,7
call Pause1
call GenAll
call Pause1
bcf PORTA,4
bcf PORTB,6
bcf PORTB,7
call Pause1
goto SoundRight
;------------------LEFT----------------------
SoundLeft TrigLeft_1
call Pulse
TrigLeft_0
btfss EchoLeft
goto $-1
call Pause
btfss EchoLeft
goto SetRedLeft
call Pause
btfss EchoLeft
goto SetYellowLeft
goto SetGreenLeft
SetRedLeft movlw RedLeft
iorwf PORTB,1
bcf PORTB,1
bcf PORTB,2
goto SoundRight
SetYellowLeft movlw YellowLeft
iorwf PORTB,1
bcf PORTB,0
bcf PORTB,2
goto SoundRight
SetGreenLeft movlw GreenLeft
iorwf PORTB,1
bcf PORTB,0
bcf PORTB,1
clrwdt
btfsc EchoLeft ; wait Echo end
goto $-2
goto SoundRight
;----------------RIGHT---------------------
SoundRight call Pause2
TrigRight_1
call Pulse
TrigRight_0
btfss EchoRight
goto $-1
call Pause
btfss EchoRight
goto SetRedRight
call Pause
btfss EchoRight
goto SetYellowRight
goto SetGreenRight
SetRedRight movlw RedRight
iorwf PORTB,1
bcf PORTB,4
bcf PORTB,5
goto SetGenLight
SetYellowRight movlw YellowRight
iorwf PORTB,1
bcf PORTB,3
bcf PORTB,5
goto SetGenLight
SetGreenRight movlw GreenRight
iorwf PORTB,1
bcf PORTB,3
bcf PORTB,4
clrwdt
btfsc EchoRight ; wait Echo end
goto $-2
;------------------------ Set General Lights ----------------
SetGenLight btfss PORTB,0 ; check RedLeft
goto CheckRedRight
call GenRed
goto SoundLeft
CheckRedRight btfss PORTB,3
goto CheckGreenLeft
call GenRed
goto SoundLeft
CheckGreenLeft btfss PORTB,2
goto SetGenYellow
btfss PORTB,5
goto SetGenYellow
call GenGreen
goto SoundLeft
SetGenYellow call GenYellow
goto SoundLeft
END
Video
Acknowledgments and Obligations
The author expresses gratitude to his wife, who during real trials fearlessly stood at the garage door and ensured that the author did not drive either the left or right wing of the car into the wall at the entrance. If there are fearless followers who want to repeat the project, the author will answer everyone.