What didn’t Mars 3 show us?

Today is 42 years since the first successful landing of a spacecraft from Earth by Mars-Mars-3. It is known that he successfully sat down because the broadcast began - he began to transmit the first photo panorama from the surface. Antennas could open only in case of successful marsing.
As you probably know, this year they remembered him again when it became known that Zelenyikot and subscribers of his VKontakte group “Curiosity - Mars rover” discovered “Mars-3” on Mars.
A few days after the discovery of "Mars-3", I became terrified of how interesting what species the device had never transmitted to Earth. By that time, I had experience in creating 3D objects in Blender 3D based on Curiosity images and height maps attached to them. So I thought, “Can’t you do the same, but with the model of the Mars-3 landing site, placing the camera on behalf of the device?”
In theory, everything is simple. It was necessary to take the data from the Mars Reconnaissance Orbiter satellite, on the basis of which NASA experts created the surface anaglyph . Googling, I never found a way to convert anaglyph to a height map.
The band called Curiosity cried out for help. He found a response, for which I express my deep gratitude to Daniil Tolkachevwho responded and made a height map based on satellite data.
Here is his description of the process:
“Toolkit: Python + OpenCV. The algorithm is personally written, albeit standard:
1. Characteristics are searched for on the images (SIFT algorithm)
2. The point features of two images are compared. As a result, we obtain a matrix connecting a point on one image and a line on another (fundamental matrix)
3. On the basis of the fundamental matrix, the images are aligned, so it turns out that the same object on two images lies horizontally. Anaglyph is built on the basis of rectified images. Stereoscopic comparison is also made on the basis of them.
4. Using the Semiglobal Stereo Matching algorithm, a disparity map is constructed. There are some subtleties with setting up the algorithm and processing large images.
It is worth noting that the used method of building a height map does not allow to obtain absolute values, and indeed - some distortions are possible due to the peculiarity of satellite image acquisition. ”
(It seems that it is not on Habré, but if the process is interesting, then I will try to invite him for a detailed description).
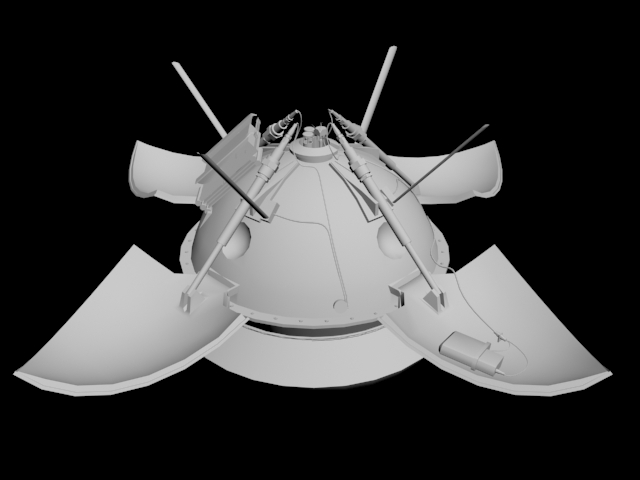
By that time, a competition for the creation of a 3D model of Mars-3 was held in the “Mars rover” group , and it could be added to the panorama.
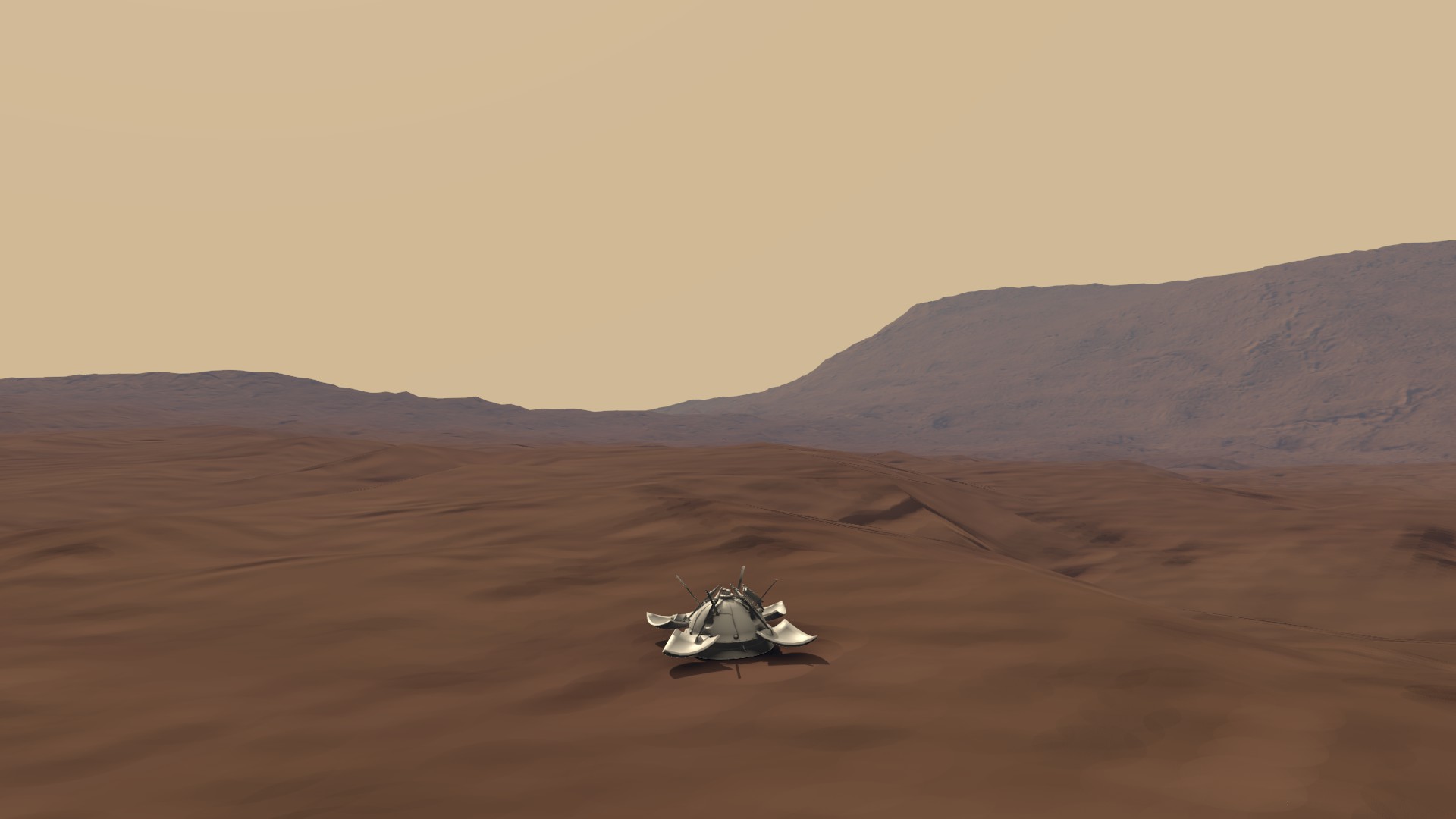
Further, a matter of technology. In short: I cut out a square piece of the desired area in the picture for the texture and the same on the height map. In Blender 3D, I created a surface, superimposed a height map on it, slightly corrected the proportionality, superimposed the texture, adjusted the Sun, the color of the sky, the atmosphere and put the model of the device in its place in the satellite image (which is the texture).
I would like to dwell on proportionality in more detail. Any normal person will ask: “And where is the guarantee that the view in this image more or less corresponds to reality?” Everything is very simple. Firstly, the map is based on satellite data. Secondly, there is such an interesting thing - objects in the program are scaled proportionally. Each side of the model is increased by the same number of times. Therefore, by stretching the model exactly to the diameter of the device in satellite photography, we automatically make it proportional to the entire landscape.
In the end, it turned out this:
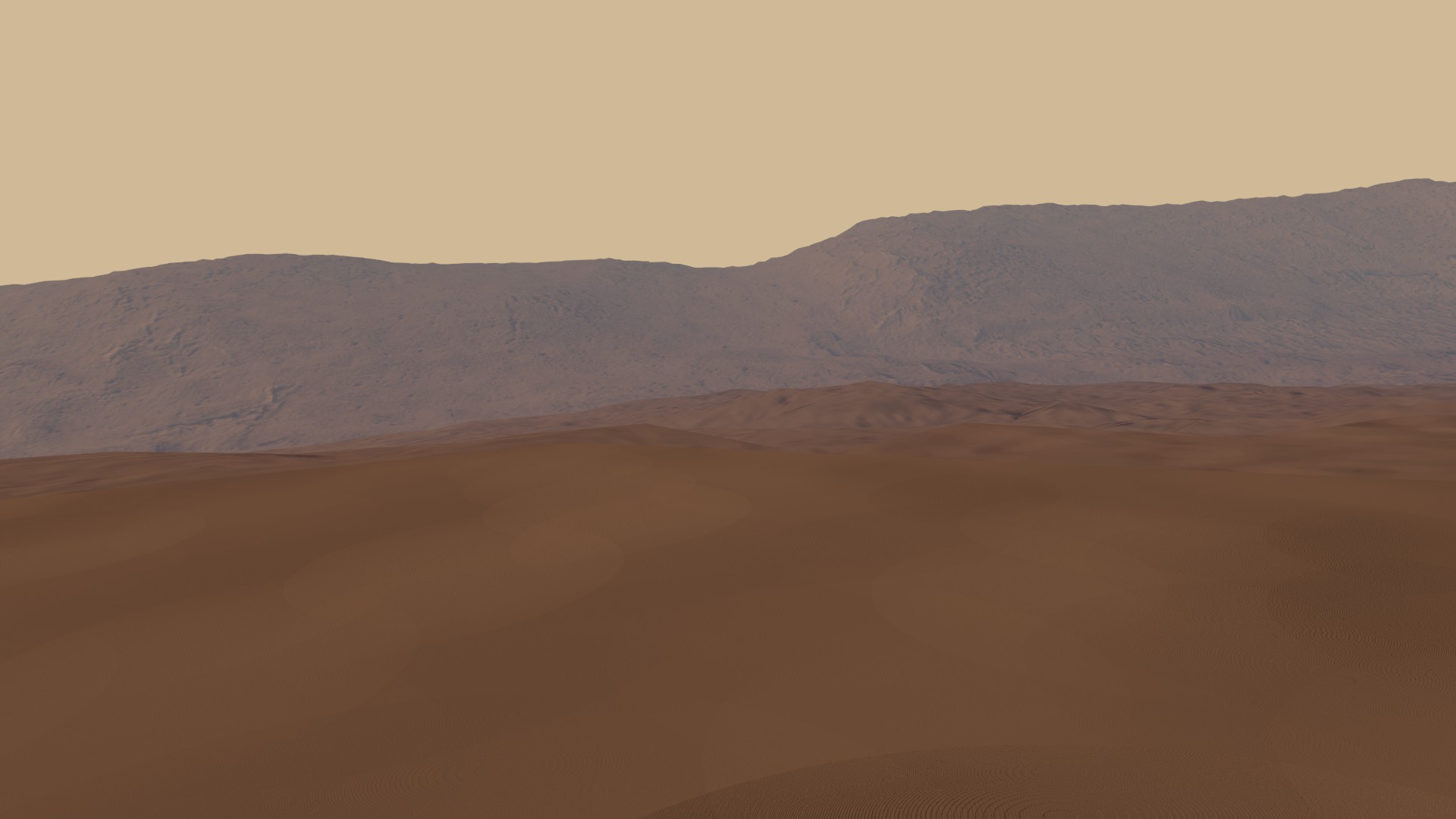
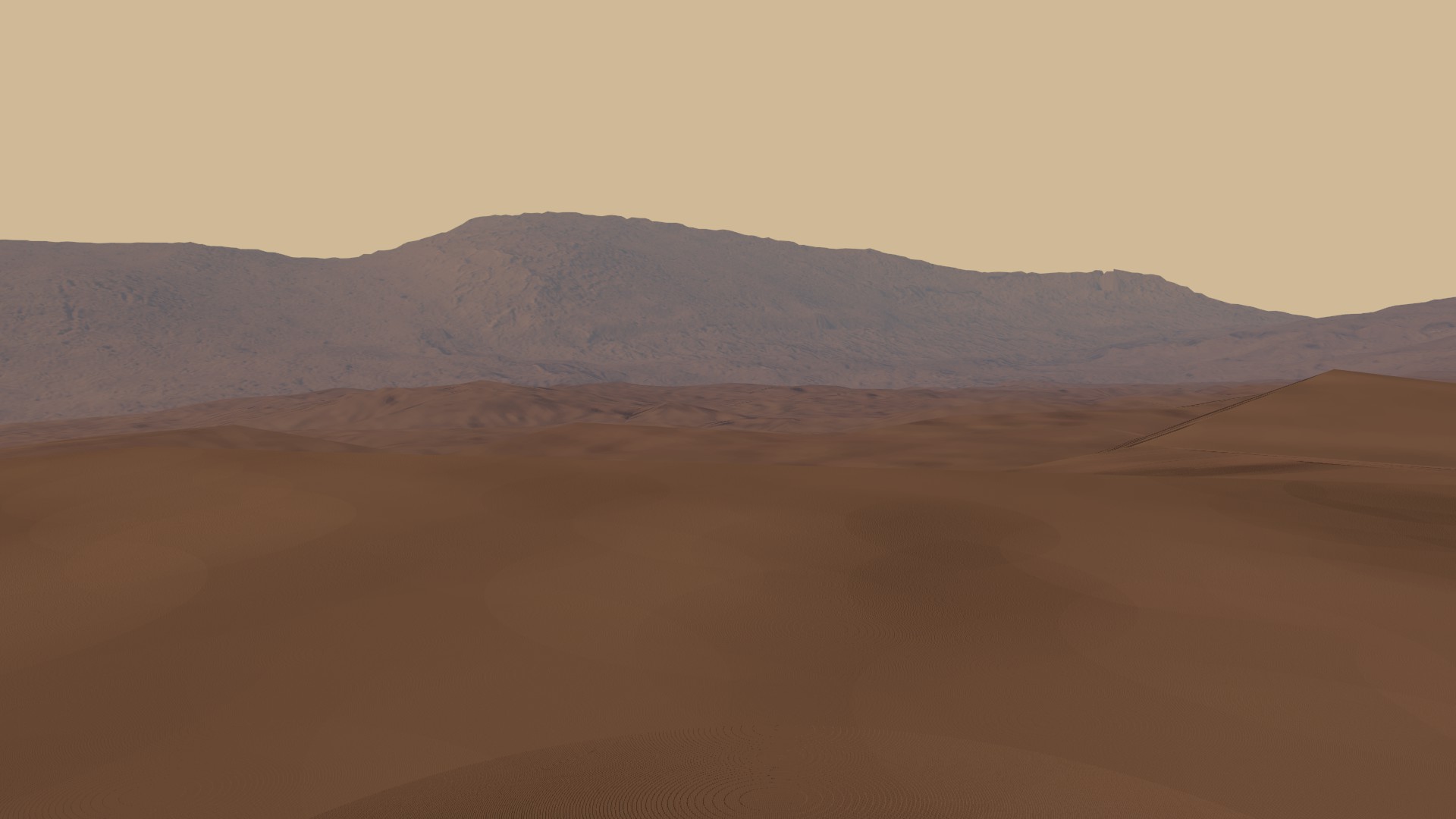
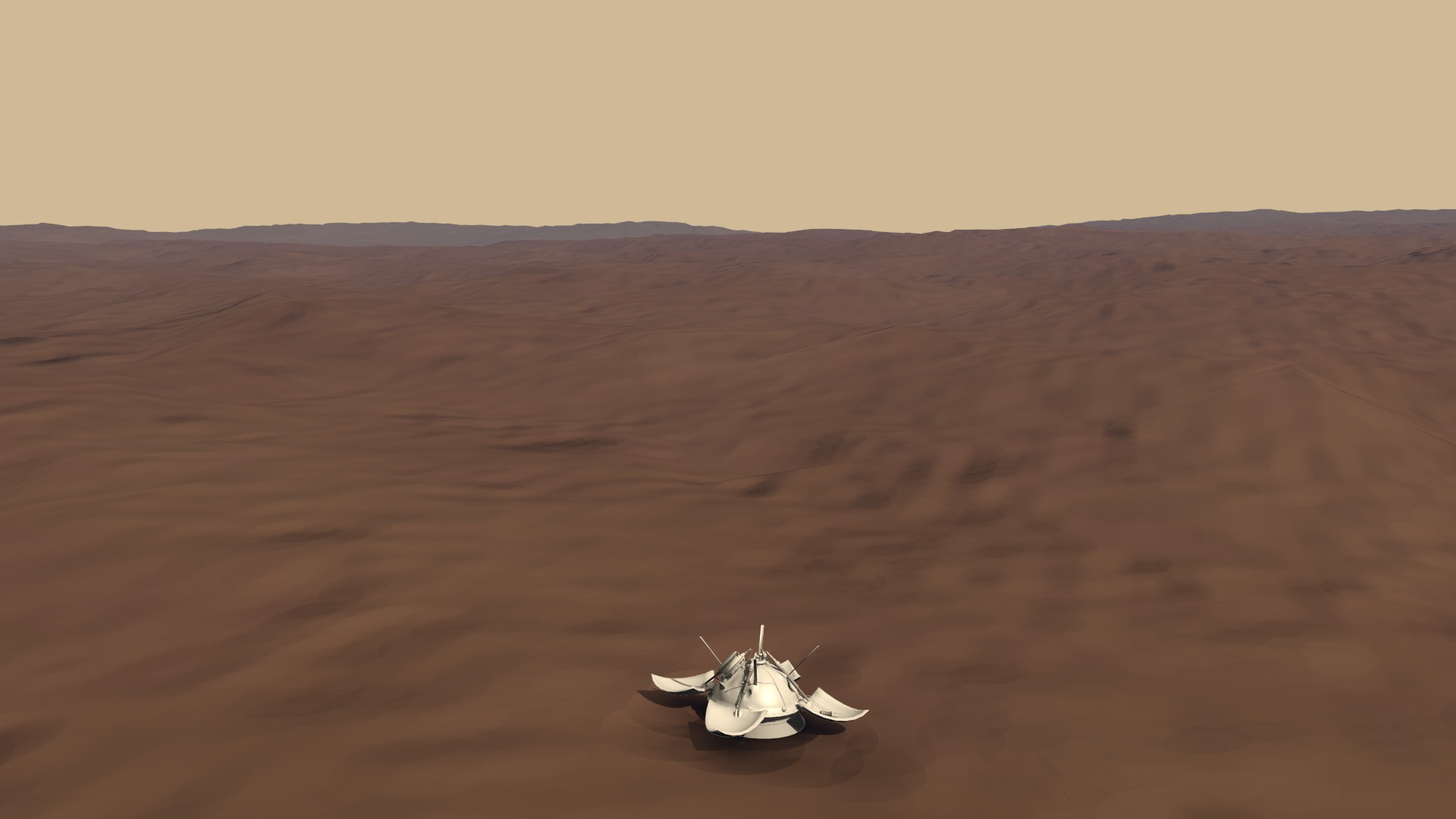
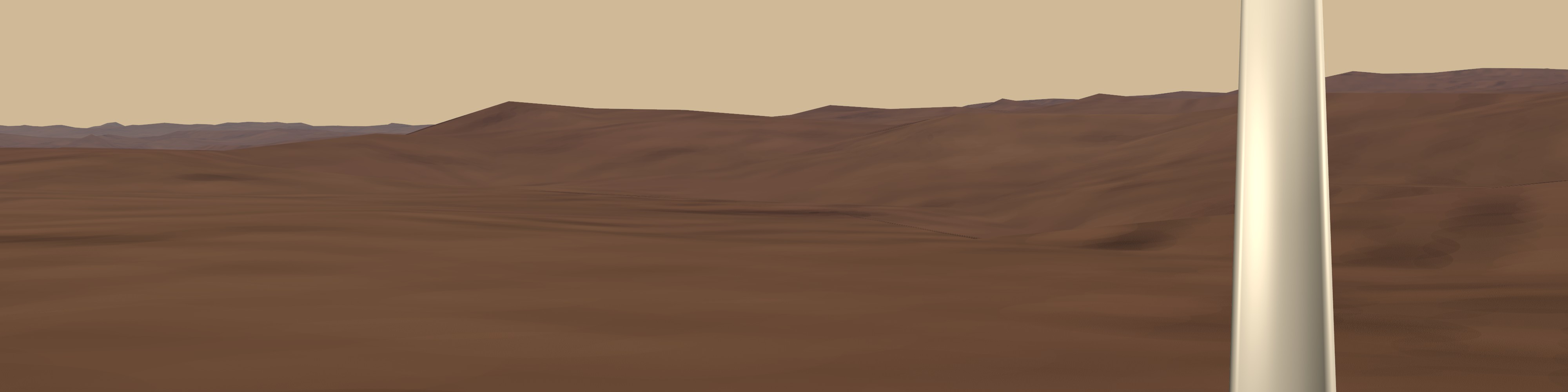
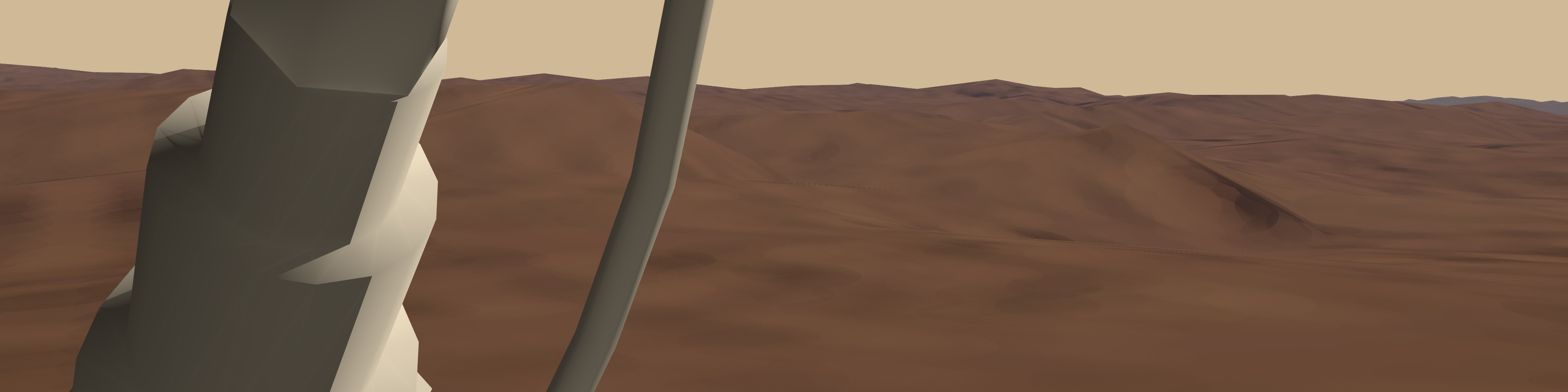
Here are the pictures that were obtained by placing the camera on behalf of the cameras of “Mars-3” itself (the length and height of the picture corresponds to the format of the camera apparatus):
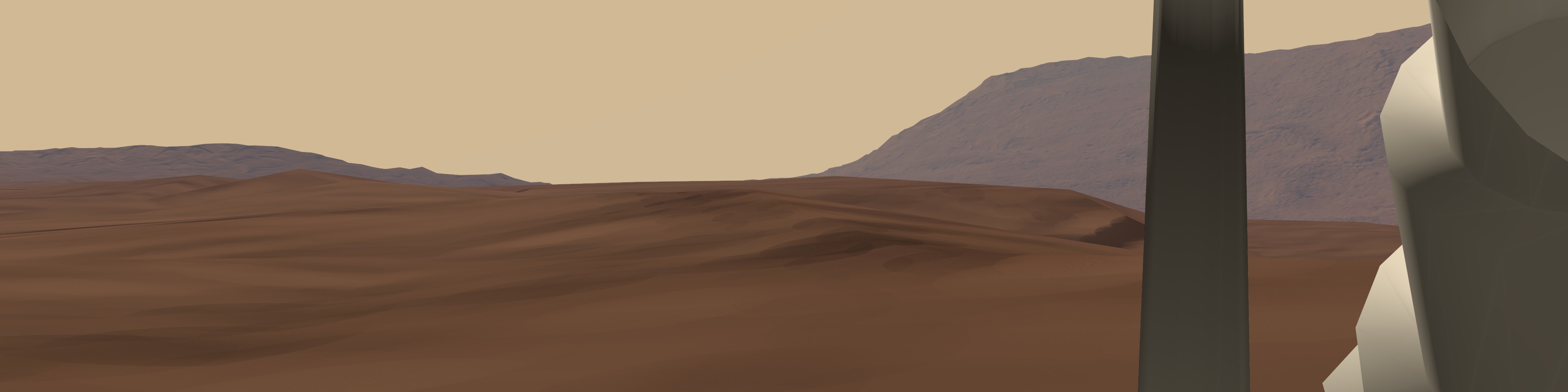

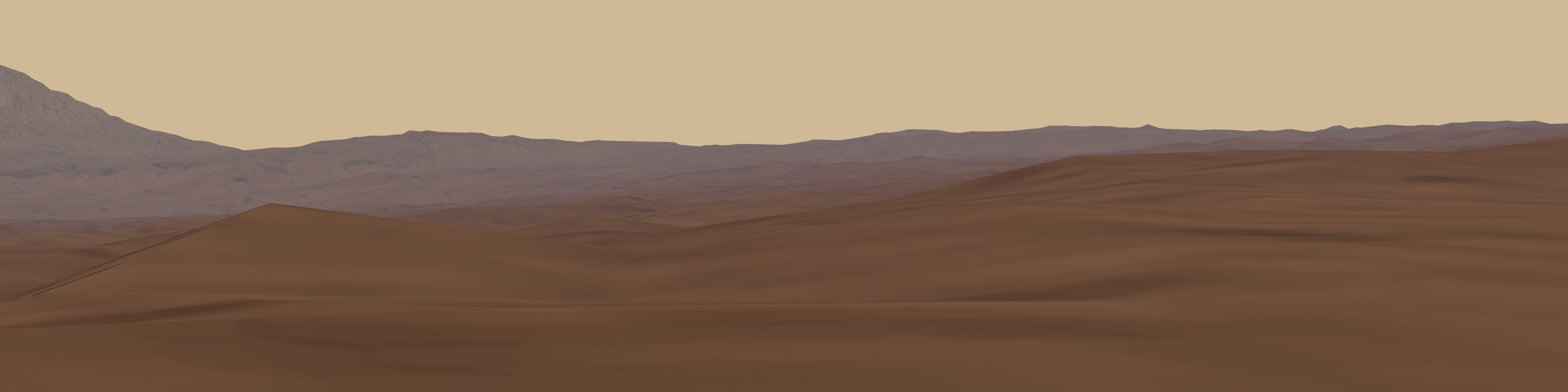
In the photographs, the most remarkable detail is the mountains in the background - this is the rampart of the 18-kilometer Reutov Crater, which was so named in August 2013.
I emphasize - they do not pretend to be hyper-accurate, but I’m sure that 60% corresponds to what we would see if the device still transmitted images from the surface (and the quality of its cameras would exceed what was installed there in 70- e gg).
Unfortunately, we do not have 3D models of the brake motor connected by chains to the lower part of the torus container, and there is no model of the foam casing with which the probe was protected at the moment of impact on the surface. Therefore, we cannot establish a complete picture of the landing site. There are no drawings either, even the model of Mars-3 itself was created “by eye”, based on photographs.

As you can see, in the simulation of the surface there are not enough stones, all kinds of small details that can be seen in the satellite image. Therefore, if there are people among the habrausers who can tell you how to do it better, or do it yourself, I will be very happy and ready to provide all possible assistance.