Industrial networks in the context of the fourth industrial revolution
First, a small historical digression about what the fourth industrial revolution, announced last year.
- The advent of industry. The first industrial revolution took place at the beginning of the 19th century and was associated with a massive transition from the use of muscle power to the energy of a steam engine. Key technologies - steam engine, factory. There was the possibility of mass production, but its products were expensive.
- Mass production. The second revolution took place at the beginning of the 20th century, and marked the beginning of cheap mass production. Key technologies are conveyor and Taylorism . Mass-produced products fell by an order of magnitude.
- Automation. The third revolution in industry occurred in the 80s. CNC machines and robots have made modern factories virtually uninhabited. (Outsourcing of manual labor to developing countries smoothed out this trend.) Mass-produced products have fallen in price by an order of magnitude (it has become cheaper to throw out than to repair).
- Decentralization. The four point zero revolution is happening now. The key technology is the convergence of industry and IT, 3D printers. There is the possibility of producing a small series or a unique product at a price approaching the cost of the same in a large series.
It seems to me that in the introduction I wrote too many general phrases and too little technical hardcore. I will fix this under the cut, describing some technical details about industrial networks and Intel products related to them (+ another picture with a robot).
For me personally, the main question of the fourth industrial revolution is
I repeated the mantra above - "IT technologies come into the industry, and radically reduce the cost of production." In order not to be unfounded, it would be necessary to list which technologies. I see three main elements.
1. The use of control devices based on general-purpose processors / chipsets, slightly modified to meet industry requirements (reliability, realtime, temperature, fanless, etc.). I already wrote about this trend .
2. Use of IT network infrastructure for communication of sensors, actuators, robots, automatic machines with control elements. About this post today.
3. The two previous paragraphs automatically indicate the need to use in industrial products IT approaches to programming, system administration and information security. The field here is not plowed! (By the way, is there a need for a post on the features of programming CNC machines and robots, and how do programming technologies that we are used to in IT already penetrate into this area?)
The economic argument for using IT technology in industry is very simple. Billions of laptop and personal computer users have already paid for R&D and mass production of related technologies. Why not take advantage of it, for example, in the same way as it is used in HPC? (The processors of most supercomputers are manufactured on a multi-billion-dollar factory loaded mostly with laptop processors. The microarchitecture of the Xeon EP and Core i3 cores is no different.)
So, more on industrial networks ( Filedbus ). During the third industrial revolution, many Fieldbus standards were created: Profibus, Modbus, Sercos, etc., etc. ... They all use specialized phy, and, as a result, vendors had to develop and maintain special hardware (ASIC or FPGA) and special firewood, and users had to stretch non-standard cables and use exotic connectors.
In IT, the same zoo of networks once existed (remember Token Ring, Apple Net, ARCNET, Ethernet via coaxial?). In the end, Ethernet over twisted pair and TCP / IP defeated everyone. In the industry with the basis of convergence at the phy level, there are no more questions either. Obviously, the future of industrial networks is based on Ethernet-based protocols on a standard twisted pair cable: Profinet , Ethercat , Sercos III and EtherNet / IP. In fact, the number of types of industrial networks based on Ethernet is somewhat larger. For example, there is even a Korean national standard. But the above are the most common, and therefore in this review I will limit myself to them.
All of them can use cable and network infrastructure, proven over years of use in the IT industry. You can debug them with Wireshark, and not with an oscilloscope, like old fieldbus. Each standard has a big "mother" (Profinet - Siemens, Ethercat - Beckhoff, Ethernet / IP - Rockwell, Sercos III - Bosch) and a consortium of companies that promote it. However, the equipment of each major manufacturer supports not only its “favorite” standard of the industrial network, but also the majority of the rest. Therefore, there are a myriad of bridge options between these networks on the market. Such fragmentation is not very pleasing, and there is a suspicion that in a few years there will remain 1-2 basic standards. You can do anti-scientific fortune-telling and sketch a tablet comparing the characteristics of the most common protocols.
| Protocol | Devices in one segment | Minimum cycle | Internet compatibility | Topology |
| Ethercat | 65536 | 12.5us | Not really | arbitrary but logical rings |
| Profinet | wazoo | 31.25us | good | arbitrary |
| Sercos III | 511 | 31.25us | good | ring line |
| Ethernet / IP | wazoo | ~ 1ms | the best | arbitrary |
I evaluated the level of Internet compatibility by the degree of support for the TCP / IP network protocols. Packets of each of the Ethercat, Profinet, and Sercos III networks are transmitted in Ethernet frames and have their own Ethertype (like IP or ARP). Ethernet / IP, in contrast to them, uses IP, with the exception of the case of ring topology, then it also uses its ethertype. Thus, Ethernet / IP is the most IT-oriented of many industrial Ethernet standards. This is its main feature, but it is also the main drawback - it is difficult to provide real time with fast cycles. Then come Profinet and Sercos III, in which by design Internet traffic goes along the same wires, at a time when they are not busy transmitting critical data. For example, on a profinet network, you can use IP, UDP, TCP, distribute addresses via DHCP (or use its younger brother -DCP ).
The farthest from IT is Ethercat, but it is potentially the fastest. Ethercat, Profinet, and Sercos III networks are distinguished by the fact that they have two classes of devices - master and slave (controller and device). Master can be implemented on a regular network card, and a slave card works a little trickier. It should read the incoming packet on the fly, insert its data into it and send it further (or vice versa if it is at the end of the Ethercat line). It turns out that it implements a MAC resembling a token ring.
I simplified things a bit by describing how industrial networks can use network infrastructure. Of course, cables and connectors will work, as well as some switches (however, nuances are possible with them). But ordinary network cards and most importantly their drivers with deterministic cycles of tens of microseconds are not adapted to work. What are the typical requirements in numbers? You must be able to connect multiple devices in one network segment, exchanging small data packets (from units to hundreds of bytes) with a frequency of up to tens of kilohertz, and with guaranteed data delivery on time every cycle. A maximum frequency of 30 kilohertz means that the minimum cycle is 33 microseconds. Hence, in the Profinet IRT and SERCOS III standards, the minimum cycle is defined as 31.25 microseconds. Transferring hundreds of bytes each cycle is up to 25 megabits per second per device. Industrial networks still live well on 100BASE-TX. The transition to 1 gigabit is just beginning, and mainly for reasons of decreasing latency (the width of the "pipe", as I showed enough for a hundred megabits).
All vendors have special cards with a regular Ethernet phy transceiver, and a special body kit for implementing the higher layers of the corresponding network stack. There are also various degrees of paid firmware with the implementation of these networks for FPGA Xilinx and Altera. Everyone knows that in addition to processors and chipsets, Intel produces network cards. Recently, an I210 (Springville) card has been released , which implements some features that make it possible to implement a fast cycle fieldbus adapter on its basis.
What makes the Intel I210 particularly suited for industrial phy Ethernet based networks? It has its own RT timer, available for reading and writing, and allowing you to generate interrupts. This allowed to implement in iron
IEEE 1588 / 802.1AS synchronization, which is included in the Profinet and Sercos III protocols. It also makes it possible to transmit frames on a timer, which is useful for implementing any fieldbus protocol. 4 independent queues for transmission and 4 for reception can be used to separate realtime and non-realtime traffic or to operate several virtual machines (with VMDq).
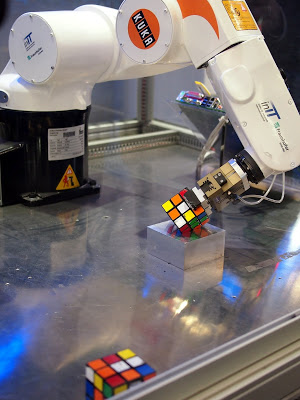 I photographed this iron friend collecting Rubik's cubes at the Intel exposition at Embedded World 2013 two months ago. It is controlled from the motherboard in the background, through the Profinet network, Intel I210 network adapter, and KW-Software's Profinet IRT stack.
I photographed this iron friend collecting Rubik's cubes at the Intel exposition at Embedded World 2013 two months ago. It is controlled from the motherboard in the background, through the Profinet network, Intel I210 network adapter, and KW-Software's Profinet IRT stack.I hope that I gave the tax to the technical details to the habractor, and now I will be allowed to finish the post with a couple of common phrases. We in the IT industry are accustomed to hype - the annual appearance of new technology that should revolutionize the world (cloud, web 2.0, etc.) There is a hype in the industry - Internet of things, M2M, etc. But I think that the fourth industrial revolution has concrete technical and economic foundations. And you can participate in it. In the 70s-2010s there was such a common parental curse - you will not study well, you will go to vocational school, and then to the factory. But now it looks like factory work can become sexy again! (True, the factories will be completely different)
In addition to direct working experience (unfortunately, Ethernet / IP is not very common in Europe, so I never came across it and took data from Wikipedia), the post used data from two academic articles:
1. “Minimum Cycle Time Analysis of Ethernet- Based Real-Time Protocols ”
2.“ The Fildbus War: History or short break between battles? ”