Quadcopters - how did it all start?
A modern quadro (hexa, octo) copter is a fairly powerful “computing” device that can be controlled from a smartphone via WiFi, hang at one point, fly along a route, etc. Anyone can buy such a device now. How did it all begin?
To understand the essence of technical solutions, we’ll understand a little how a quadrocopter flies. In essence, a quadrocopter is an unstable system. If you take 4 motors, and just connect them to the battery, the quadrocopter will not fly anywhere, it will simply roll over. traction power of motors will never be identical. And then the electronics comes into play. On board the quadrocopter there is a central “control board”, the key part of which is the sensor unit. In the simplest case, this is a three-axis gyroscope. The microcontroller constantly reads data from gyroscopes, and as soon as the gyroscope “senses” the tilt along any axis, the controller instructs the corresponding motor to slightly increase or decrease the speed to compensate for the tilt. In general, the whole logic - with the exception of a bunch of everything (PID controllers, control theory, Kalman filters), there’s nothing complicated (a joke). Well, for the user everything is really transparent. There are no moving parts except for motors in the quadrocopter, all control is carried out exclusively by changing the rotation of the engine revolutions (with turns similarly - we change the rotation speed, we obtain the torque). Now back to the story.
Caution, traffic.
The legendary German company, thanks to the engineers of which in 2006 the first device appeared. The controller had an Atmega644 processor on board with 4K of memory and a frequency of up to 20 MHz, 3 gyroscopes on each axis, an accelerometer (for horizontal flight) and a barometer to maintain altitude (the accuracy of the MPX4115A barometer is about 1 m). Later, additional modules appeared, for example GPS for holding a position.
Now you can find a video on youtube about how it all flew (2007).
In general, the system was very successful. Their products were never cheap, the price tag began somewhere from 1500 Euro. The company exists now, they produce professional devices, the corresponding price category. And one more important point - initially, the creators of Microcopter made the source code open. Of course, in the near future various clones began to appear (including those made in the Russian Federation), this of course negatively affected sales, and then the code was closed. But still, I think this served as a big impetus to the creation of a different type of multicopter.
Our MikroKopter was not popular because of the price, and there were not so many owners. However, an impetus was given to the world community, and various systems began to appear.
One of the simplest systems produced (in various versions) from 2010 to the present. The control board has only 3 gyroscopes; ordinary variable resistors are used to adjust the parameters.
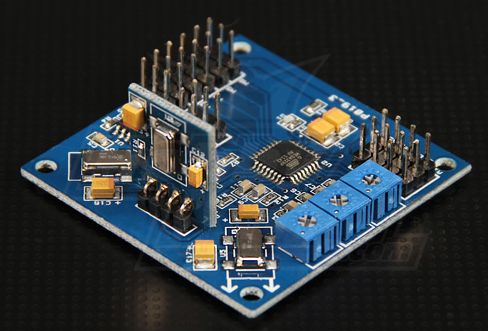
(Photo from Hobbyking.com)
Such a board now costs only about $ 15, as you can see, on board, in addition to gyroscopes and a weak processor, in general, there is nothing. Firmware in the source code for KK is freely available on the Internet, those who wish can download it by typing the file name “kk2_1V1.zip” in Google search (the size is only 90Kb). This is probably the first and latest version of the firmware of a copter, written in assembler.
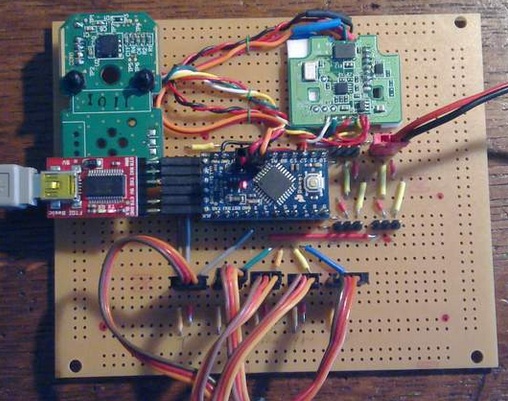
The next milestone in the development of copters was the MultiWii system. The name came from the gamer Nintendo Wii and Wii Nunchuk, which the craftsmen dismantled, and sawed out a board with sensors from there. The Arduino Nano was used as the central processor.
The appearance of the board turned out to be something like this (photo from the rcgroups website, 2010):
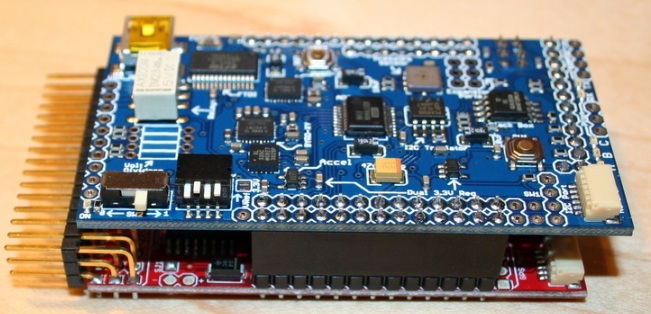
However, in a few years the system has evolved, and the latest boards (they are sold now, the price is $ 20-30) looks something like this:

(photo from the site Hobbyking.com)
The latest versions of MultiWii have quite good sensors, they can hang at a point on GPS, hold altitude and return home. Because Multiwii was written for Arduino, all the boards remained Arduino-compatible, the source code can be downloaded on Github. One of the drawbacks of MultiWii is its weak processor, which limits the computational capabilities of the algorithms; later clones on STM32 began to appear, but they did not make the weather, because in terms of hardware, any quadrocopter is quite simple, 95% of the complexity lies precisely in the code. At the same time, I am sure that MultiWii sources became the basis of all today's commercial systems.
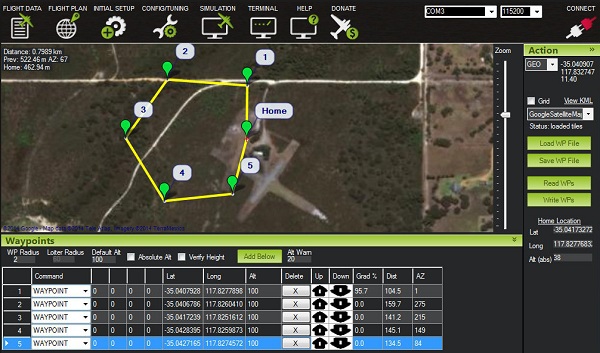
Another Arduino-based system went the farthest. Now it is a system with the possibility of programmable point-to-point flight, support for radio modems and telemetry transmission, storage of various logs, etc.
Their software looks something like this:
Boards have evolved from these:
to such

Boards are sold now, the price is from $ 50 (per clone) to $ 250 for the original versions. Ardupilot source codes are also fully available on github, and judging by the number of commits, the project is actively developing. This system is not inferior in capabilities to professional devices, the flight quality can be seen in the video:
Everything is cool here, with the exception of one “but” - this is Open Source, with all the ensuing consequences. The system is open, finalized by enthusiasts, and no one guarantees anything, including the absence of bugs in software. If the quadrocopter falls on someone else's BMW, there will be no one to complain about.
In parallel with quadrocopters, another very interesting technology developed - brushless gimbal for photo / video camera. This is a separate board with its sensors, which keeps the camera in the desired position due to two motors, compensating for turns in the corresponding axes. They were developed by our compatriot, how the suspension works, can be seen in the video (2013 year).
It can be seen that the copter is swinging, but the camera axis is not.
Now it’s no surprise to anyone, and then it was a real breakthrough in the quality of video shooting.
Writing about them is not so interesting, because the principle is simple, pay and fly. The first was the aforementioned MicroKopter, the next (and not very successful) attempt was XAircraft, Gaui devices were popular in the budget sector (this was the first budget device priced at about $ 400 for a ready copter). And finally, the most successful company is DJI, about which only the lazy did not write, so it makes no sense to repeat here. They entered the market with DJI Naza controllers (at a price of $ 200-400, with the possibility of holding a position, returning home), there was a separate professional DJI Wookong series (at a price of about $ 1,000 and greater flight stability). Finally, DJI entered the market of ready-to-fly devices (RTF, Ready To Fly), well, everyone already knows about them.
And the latest videos.
The first budget quadrocopter Gaui 330. Issue price of $ 400, 2010, no additional functions.
Dji Naza v2, the question price is the same $ 400, the ability to hold a position, return home, fly either side to the pilot (carefree mode).
Dji Phantom 3 - with built-in camera gimbal, smartphone controls and other goodies.
That's all for now, sorry for the large number of videos, but without them nothing, otherwise it would be uninteresting. Let's see what happens next, after 5 years ...
How does a quadrocopter fly?
To understand the essence of technical solutions, we’ll understand a little how a quadrocopter flies. In essence, a quadrocopter is an unstable system. If you take 4 motors, and just connect them to the battery, the quadrocopter will not fly anywhere, it will simply roll over. traction power of motors will never be identical. And then the electronics comes into play. On board the quadrocopter there is a central “control board”, the key part of which is the sensor unit. In the simplest case, this is a three-axis gyroscope. The microcontroller constantly reads data from gyroscopes, and as soon as the gyroscope “senses” the tilt along any axis, the controller instructs the corresponding motor to slightly increase or decrease the speed to compensate for the tilt. In general, the whole logic - with the exception of a bunch of everything (PID controllers, control theory, Kalman filters), there’s nothing complicated (a joke). Well, for the user everything is really transparent. There are no moving parts except for motors in the quadrocopter, all control is carried out exclusively by changing the rotation of the engine revolutions (with turns similarly - we change the rotation speed, we obtain the torque). Now back to the story.
Caution, traffic.
Mikrokopter
The legendary German company, thanks to the engineers of which in 2006 the first device appeared. The controller had an Atmega644 processor on board with 4K of memory and a frequency of up to 20 MHz, 3 gyroscopes on each axis, an accelerometer (for horizontal flight) and a barometer to maintain altitude (the accuracy of the MPX4115A barometer is about 1 m). Later, additional modules appeared, for example GPS for holding a position.
Now you can find a video on youtube about how it all flew (2007).
In general, the system was very successful. Their products were never cheap, the price tag began somewhere from 1500 Euro. The company exists now, they produce professional devices, the corresponding price category. And one more important point - initially, the creators of Microcopter made the source code open. Of course, in the near future various clones began to appear (including those made in the Russian Federation), this of course negatively affected sales, and then the code was closed. But still, I think this served as a big impetus to the creation of a different type of multicopter.
Our MikroKopter was not popular because of the price, and there were not so many owners. However, an impetus was given to the world community, and various systems began to appear.
Kaptainkuk
One of the simplest systems produced (in various versions) from 2010 to the present. The control board has only 3 gyroscopes; ordinary variable resistors are used to adjust the parameters.
(Photo from Hobbyking.com)
Such a board now costs only about $ 15, as you can see, on board, in addition to gyroscopes and a weak processor, in general, there is nothing. Firmware in the source code for KK is freely available on the Internet, those who wish can download it by typing the file name “kk2_1V1.zip” in Google search (the size is only 90Kb). This is probably the first and latest version of the firmware of a copter, written in assembler.
Multiwii
The next milestone in the development of copters was the MultiWii system. The name came from the gamer Nintendo Wii and Wii Nunchuk, which the craftsmen dismantled, and sawed out a board with sensors from there. The Arduino Nano was used as the central processor.
The appearance of the board turned out to be something like this (photo from the rcgroups website, 2010):
However, in a few years the system has evolved, and the latest boards (they are sold now, the price is $ 20-30) looks something like this:
(photo from the site Hobbyking.com)
The latest versions of MultiWii have quite good sensors, they can hang at a point on GPS, hold altitude and return home. Because Multiwii was written for Arduino, all the boards remained Arduino-compatible, the source code can be downloaded on Github. One of the drawbacks of MultiWii is its weak processor, which limits the computational capabilities of the algorithms; later clones on STM32 began to appear, but they did not make the weather, because in terms of hardware, any quadrocopter is quite simple, 95% of the complexity lies precisely in the code. At the same time, I am sure that MultiWii sources became the basis of all today's commercial systems.
Arducopter
Another Arduino-based system went the farthest. Now it is a system with the possibility of programmable point-to-point flight, support for radio modems and telemetry transmission, storage of various logs, etc.
Their software looks something like this:
Boards have evolved from these:
to such
Boards are sold now, the price is from $ 50 (per clone) to $ 250 for the original versions. Ardupilot source codes are also fully available on github, and judging by the number of commits, the project is actively developing. This system is not inferior in capabilities to professional devices, the flight quality can be seen in the video:
Everything is cool here, with the exception of one “but” - this is Open Source, with all the ensuing consequences. The system is open, finalized by enthusiasts, and no one guarantees anything, including the absence of bugs in software. If the quadrocopter falls on someone else's BMW, there will be no one to complain about.
Brushless gimbal
In parallel with quadrocopters, another very interesting technology developed - brushless gimbal for photo / video camera. This is a separate board with its sensors, which keeps the camera in the desired position due to two motors, compensating for turns in the corresponding axes. They were developed by our compatriot, how the suspension works, can be seen in the video (2013 year).
It can be seen that the copter is swinging, but the camera axis is not.
Now it’s no surprise to anyone, and then it was a real breakthrough in the quality of video shooting.
Commercial systems
Writing about them is not so interesting, because the principle is simple, pay and fly. The first was the aforementioned MicroKopter, the next (and not very successful) attempt was XAircraft, Gaui devices were popular in the budget sector (this was the first budget device priced at about $ 400 for a ready copter). And finally, the most successful company is DJI, about which only the lazy did not write, so it makes no sense to repeat here. They entered the market with DJI Naza controllers (at a price of $ 200-400, with the possibility of holding a position, returning home), there was a separate professional DJI Wookong series (at a price of about $ 1,000 and greater flight stability). Finally, DJI entered the market of ready-to-fly devices (RTF, Ready To Fly), well, everyone already knows about them.
And the latest videos.
The first budget quadrocopter Gaui 330. Issue price of $ 400, 2010, no additional functions.
Dji Naza v2, the question price is the same $ 400, the ability to hold a position, return home, fly either side to the pilot (carefree mode).
Dji Phantom 3 - with built-in camera gimbal, smartphone controls and other goodies.
That's all for now, sorry for the large number of videos, but without them nothing, otherwise it would be uninteresting. Let's see what happens next, after 5 years ...