rusEfi: 2014 results and plans
At the end of summer , the open integrated control unit of the rusEfi internal combustion engine appeared the first integrated board - Frankenso 0.1, then a fly in the ointment was a couple of mixed tracks.
At the end of August, only three people were able to start the engines on this control unit. In general, the mood was quite depressing.
Three months passed, and everything somehow slowly began to improve.
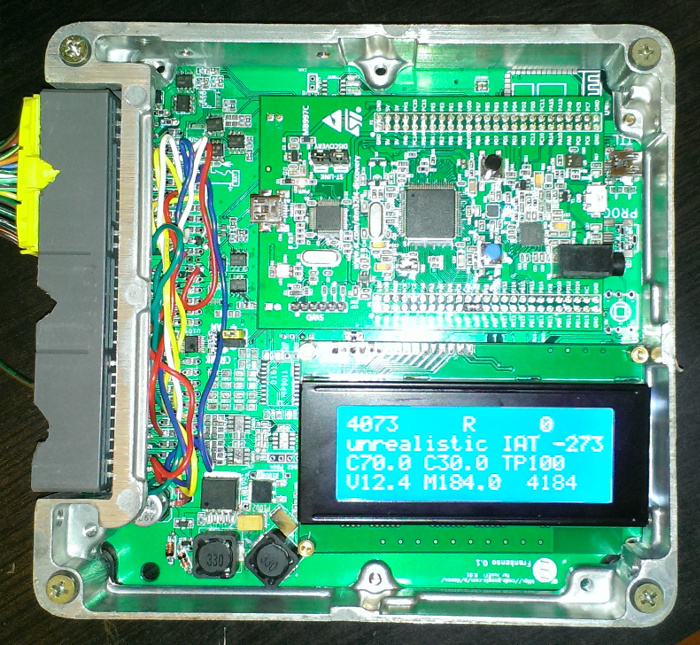
A version of the board with corrections has been released - now, if you wish, you can solder the stm32f407 chip directly to the board, the board in this form almost does not look like a designer:
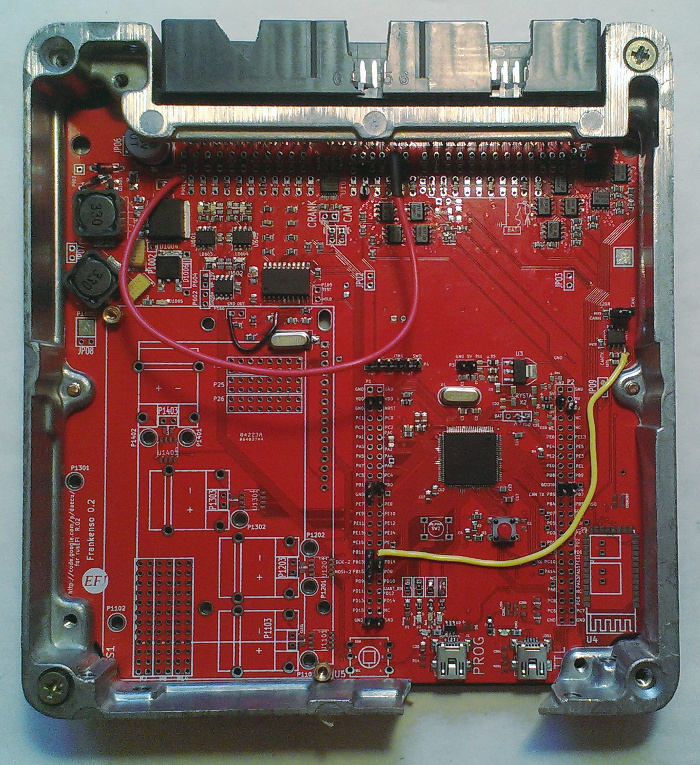
there are now ten people and 12 motors in the rusEfi club. The first row six and the first moped wound up. The first non-original board appeared:

On the one hand, all engines are very similar to each other in terms of controlling the engine - nozzles, sparks, that's all. On the other hand, modern engines often have auxiliary devices - solenoids of exhaust gas recovery systems, intake geometry change systems, camshaft phase change systems ... Plus, the ECU often also has the task of controlling attachments - air conditioning, power steering and radiator fan. There are a lot of variations here, all can not be programmed. Flexible Sexy Input Output is a rusEfi ECU chip that allows you to control such non-standard equipment using user-defined logical or arithmetic expressions.
For example, controlling a gas pump: instead of programming logic in C, we use the FSIO expression(time_since_boot <4) OR (rpm> 0)
Implementation details: we translate the expression into the reverse Polish notation, and in this form we consider all this quickly enough - if we optimize and wait for even faster processors, then we can allow ourselves to count the FSIO expressions already at each revolution - and thus amend the fuel or spark supply. But this is still a dream - for now, we are just managing relatively slow devices.
A slightly more complex example: the fan must be turned on and off at different temperatures, because there is hysteresis .
(fan and (coolant> fan_off_setting)) OR (coolant> fan_on_setting)
In existing control units, there is often a configuration of non-standard output ports in one form or another. The option of managing additional ports through a subject-oriented language will probably be the most flexible of all the options that do not require compilation and reprogramming.
You need to understand that I personally do not know much about cars - I am a programmer. Somehow the motor works, but I don’t understand how good or bad all this is; the right tool on this issue is a car dynamometer.
Native unit: 121ls / 127 pounds per foot.
first launch on rusEfi - breathtaking 44ls / 69 pounds per foot. The engine does not like the same ignition timing over the entire range /
8th start: 123ls / 128 pounds per foot, ahead of the native unit - hurray. In this case, only ignition was set up - fuel is considered by Speed Density with default parameters, apparently there is still potential for tuning.

Why is the increase in power only one and a half horsepower? Firstly, because we were tired and went to celebrate :) Secondly, because we can’t get any fantastic numbers out of the stock motor, the task of rusEfi is to control the engine with the changes made to it when the factory unit is no longer working.
Still, you need to understand why the integration with HIP9011, which will decode the knock sensor signal, does not work.
It is necessary to make idle valve controls based on a shagovik - so far only a solenoid is supported.
Still, I want to try a more automotive arm - TMS570 .
And much more.
rusefi.com
rusefi.com/forum
www.facebook.com/rusEfiECU
At the end of August, only three people were able to start the engines on this control unit. In general, the mood was quite depressing.
Three months passed, and everything somehow slowly began to improve.
A version of the board with corrections has been released - now, if you wish, you can solder the stm32f407 chip directly to the board, the board in this form almost does not look like a designer:
there are now ten people and 12 motors in the rusEfi club. The first row six and the first moped wound up. The first non-original board appeared:
FSIO
On the one hand, all engines are very similar to each other in terms of controlling the engine - nozzles, sparks, that's all. On the other hand, modern engines often have auxiliary devices - solenoids of exhaust gas recovery systems, intake geometry change systems, camshaft phase change systems ... Plus, the ECU often also has the task of controlling attachments - air conditioning, power steering and radiator fan. There are a lot of variations here, all can not be programmed. Flexible Sexy Input Output is a rusEfi ECU chip that allows you to control such non-standard equipment using user-defined logical or arithmetic expressions.
For example, controlling a gas pump: instead of programming logic in C, we use the FSIO expression(time_since_boot <4) OR (rpm> 0)
Implementation details: we translate the expression into the reverse Polish notation, and in this form we consider all this quickly enough - if we optimize and wait for even faster processors, then we can allow ourselves to count the FSIO expressions already at each revolution - and thus amend the fuel or spark supply. But this is still a dream - for now, we are just managing relatively slow devices.
A slightly more complex example: the fan must be turned on and off at different temperatures, because there is hysteresis .
(fan and (coolant> fan_off_setting)) OR (coolant> fan_on_setting)
In existing control units, there is often a configuration of non-standard output ports in one form or another. The option of managing additional ports through a subject-oriented language will probably be the most flexible of all the options that do not require compilation and reprogramming.
Pampering
You need to understand that I personally do not know much about cars - I am a programmer. Somehow the motor works, but I don’t understand how good or bad all this is; the right tool on this issue is a car dynamometer.
Native unit: 121ls / 127 pounds per foot.
first launch on rusEfi - breathtaking 44ls / 69 pounds per foot. The engine does not like the same ignition timing over the entire range /
8th start: 123ls / 128 pounds per foot, ahead of the native unit - hurray. In this case, only ignition was set up - fuel is considered by Speed Density with default parameters, apparently there is still potential for tuning.
Why is the increase in power only one and a half horsepower? Firstly, because we were tired and went to celebrate :) Secondly, because we can’t get any fantastic numbers out of the stock motor, the task of rusEfi is to control the engine with the changes made to it when the factory unit is no longer working.
Plans
Still, you need to understand why the integration with HIP9011, which will decode the knock sensor signal, does not work.
It is necessary to make idle valve controls based on a shagovik - so far only a solenoid is supported.
Still, I want to try a more automotive arm - TMS570 .
And much more.
rusefi.com
rusefi.com/forum
www.facebook.com/rusEfiECU