How to make a robot in 24 hours
When the category in which I planned to speak will not be, and exams are just around the corner.
Preface
So it turned out that this season I was seriously engaged only in micro-sumo: I started making robots in July 2013, finished by the end of March 2014. Competitions are ordinary robosumo, but the mass of the robot should not exceed 100 grams, and the robot itself in the starting position should fit in a cube 5 cm * 5 cm * 5 cm. He exhibited it only at one competition on April 6, where he was the only robot.
Black Python competes with double-sided tape:
Since in St. Petersburg at the moment there are only 2 robots of this class, then this type of competition was not included in the May competitions. And since I wanted to speak, I decided to make a light tracer, a robot for moving along the line in a quick way, since for 5 years there were 10 pieces of robotics enthusiasm (not counting those made from lego).
Design
Since the task was to make the robot in the shortest possible time, I had to resort to a ready-made solution: Freeduino Nano, a modular engine driver and a ready-made sensor strip. The opportunity to start the robot appeared only on Saturday at 12 o’clock.
14.00: A bullet in micronics for the missing details!
15.00: Fuh, I came home with everything I needed.
15.30: I ate, it is possible to design. I really wanted to make a beautiful robot, but the presence of modular parts and a limited amount of time brought it all to naught, so I did not think about the design and layout for a long time.
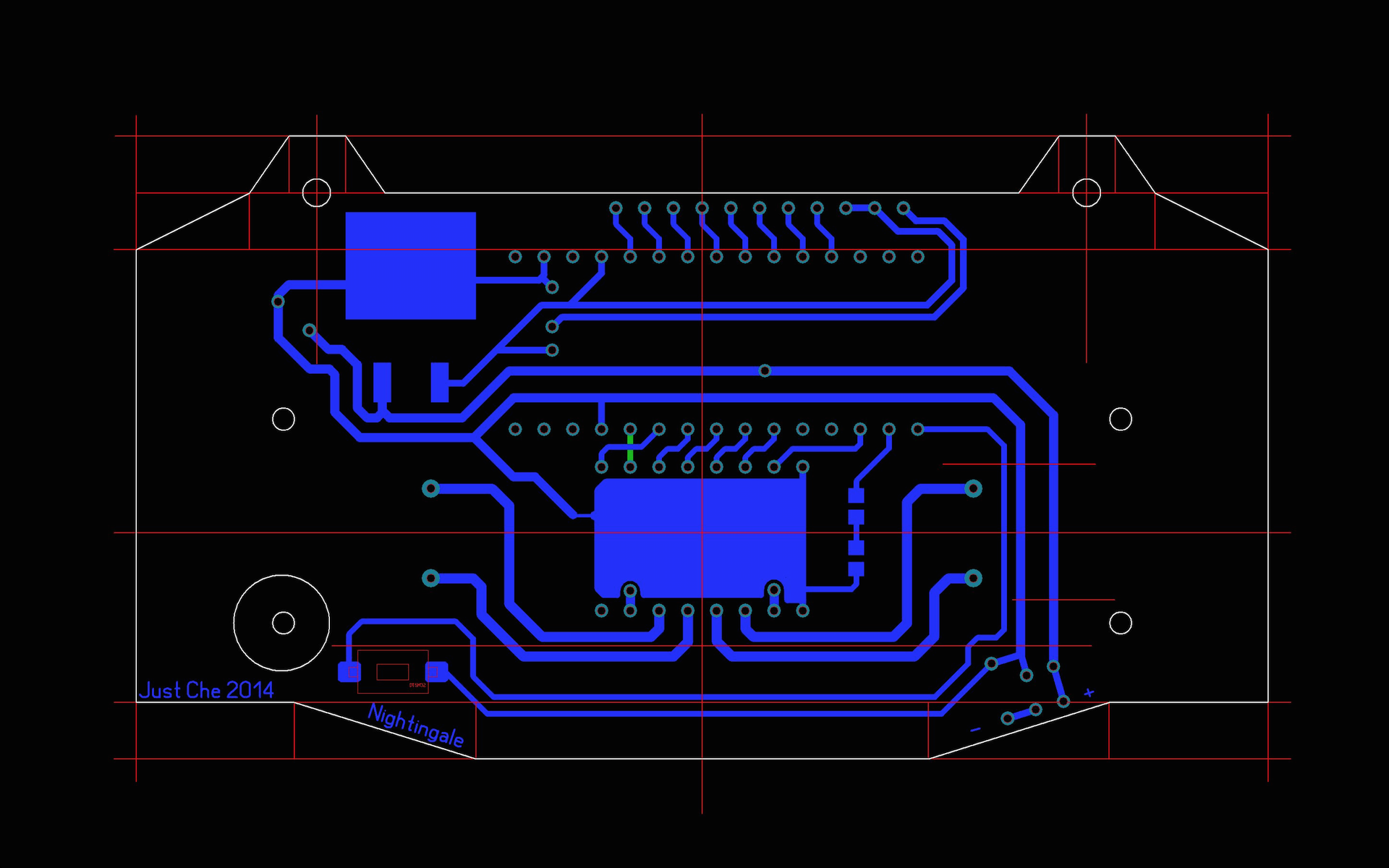
18.30: Here is the final version of the wiring (there were 2 more).
Fabrication of the construction
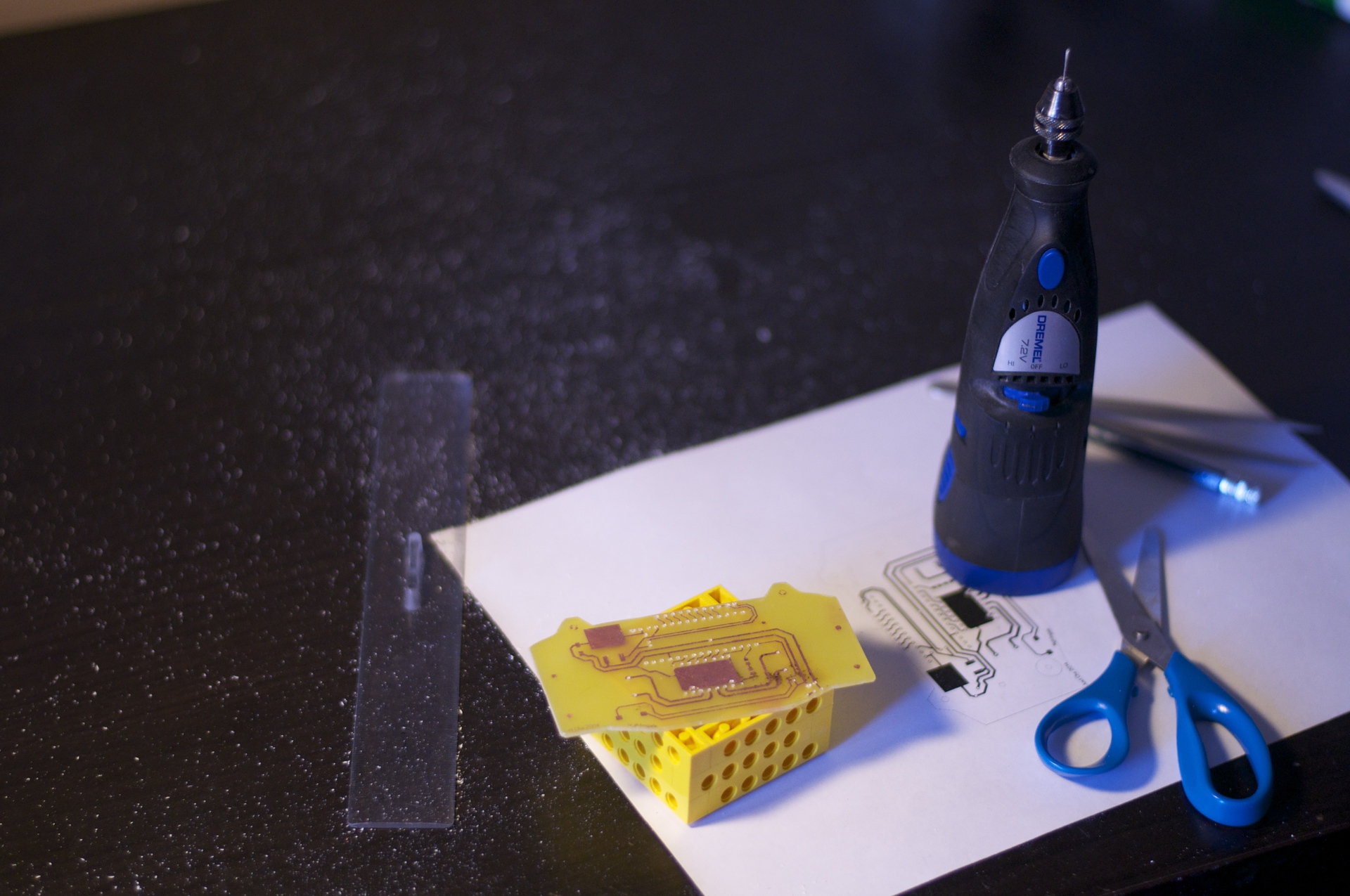
At first, the plan was simple: LUT -> cutting the board -> drilling -> soldering -> fastening motors and sensors. But when did everything go without adventures? All that remains is matte paper, which is not comme il faut for LUT, the details are scattered in packages and boxes, etc.
18.35: Well, damn it, it’s not gone too far.
18.40: Well, blin, the toner doesn’t come off, you have to cut the textolite again.
18.50: Fuh, now transferred.
19.00: It was etched, now I’ll drill a saw.
10.19: Cut it out.
19.15: Soldering, soldering and soldering again.
19.30: Ahhh! It’s unrealistic to solder the connectors, so that I would once again make the LUT tracks from the same side as the elements.
20.20: Well, that’s all, just toss the wires from the bottom.
20.40: Oh her, the stabilizer works, does not even get warm. You can take a pizza break.
10.21: It's time to continue making the bot.
21.30: And where is the engine driver?
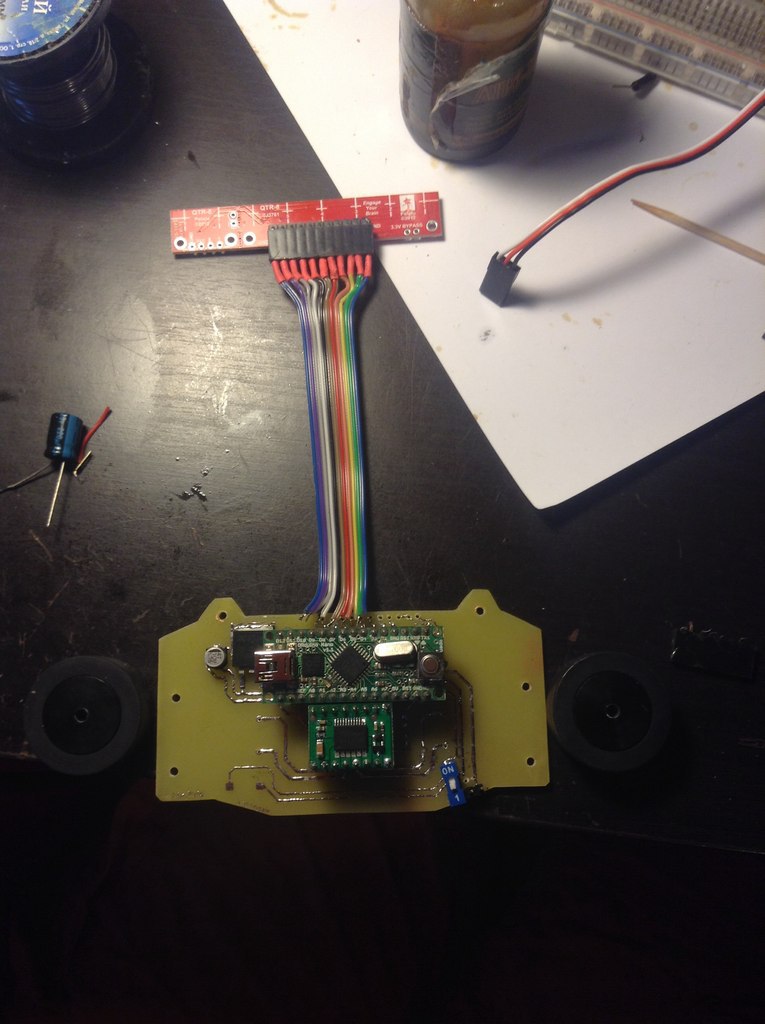
21.50: Found. Now you need a neat cable to connect the dune with the sensors.
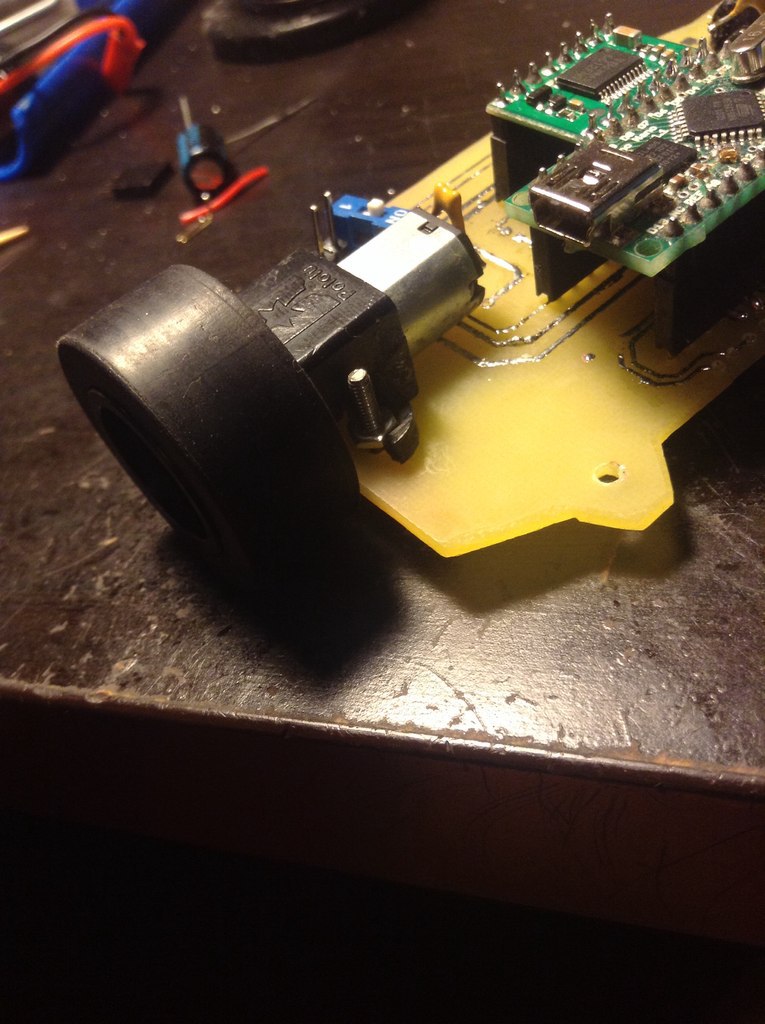
22.20: Well, now the motors. 22.30: Well, why did the mount crack?
22.40: Hmm, and what do rails for a sensor be made of?
10.23: Okay, this is tomorrow's problem.
23.25: Shorty. It is necessary to solder a bit.
23.30: Soldered. It works, it does not heat up.
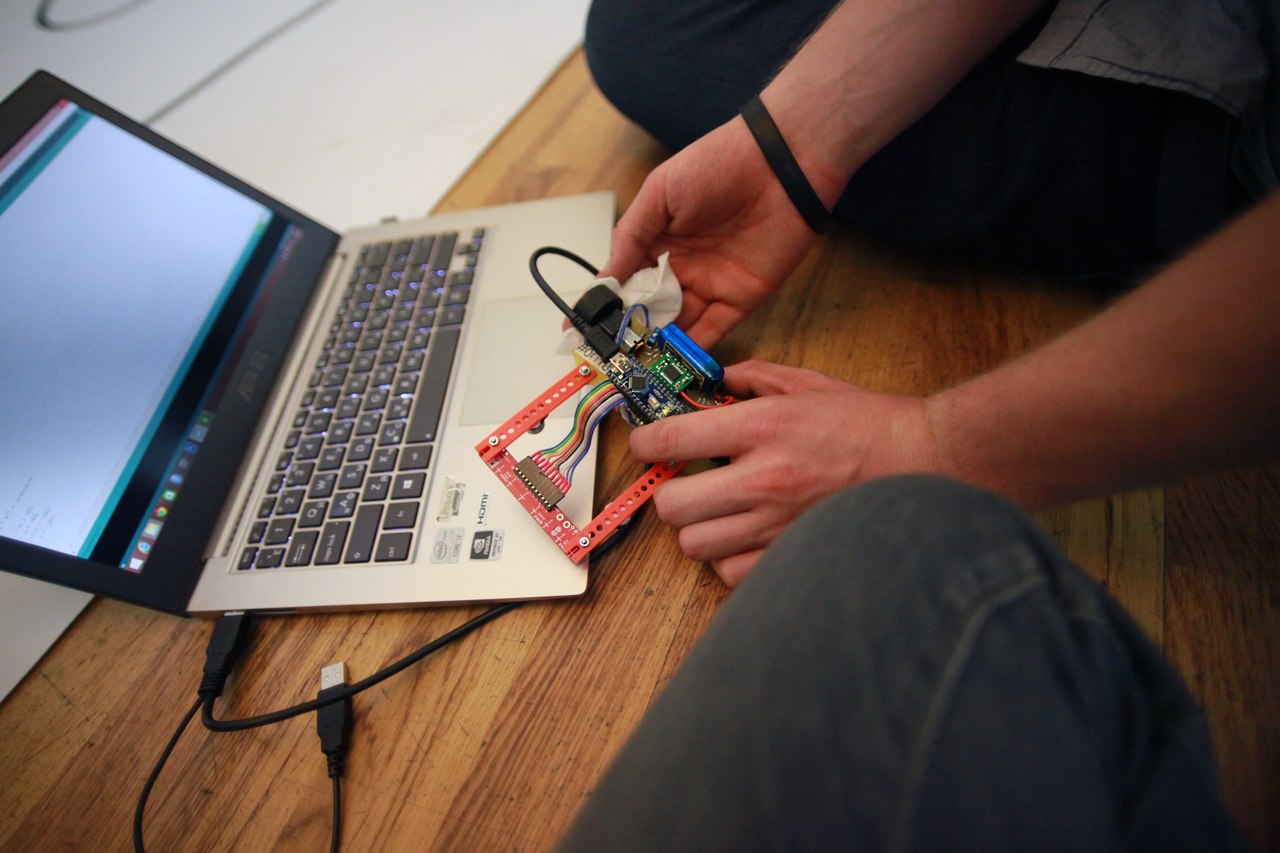
23.50: Come on, arduino, ask for it already!
00.30: Do not put drivers for her, so what to do. Tomorrow I will change to another. And now we need to get together for the competition and sleep.

9.30: I came to the competition.
10.00: Checked in, chose the field (line thickness -1.5 cm)

12.00: Everything, finished with the design, changed the nanu, put the slats, glued the drags.
12.30: I looked at other species, and you can start to skip.
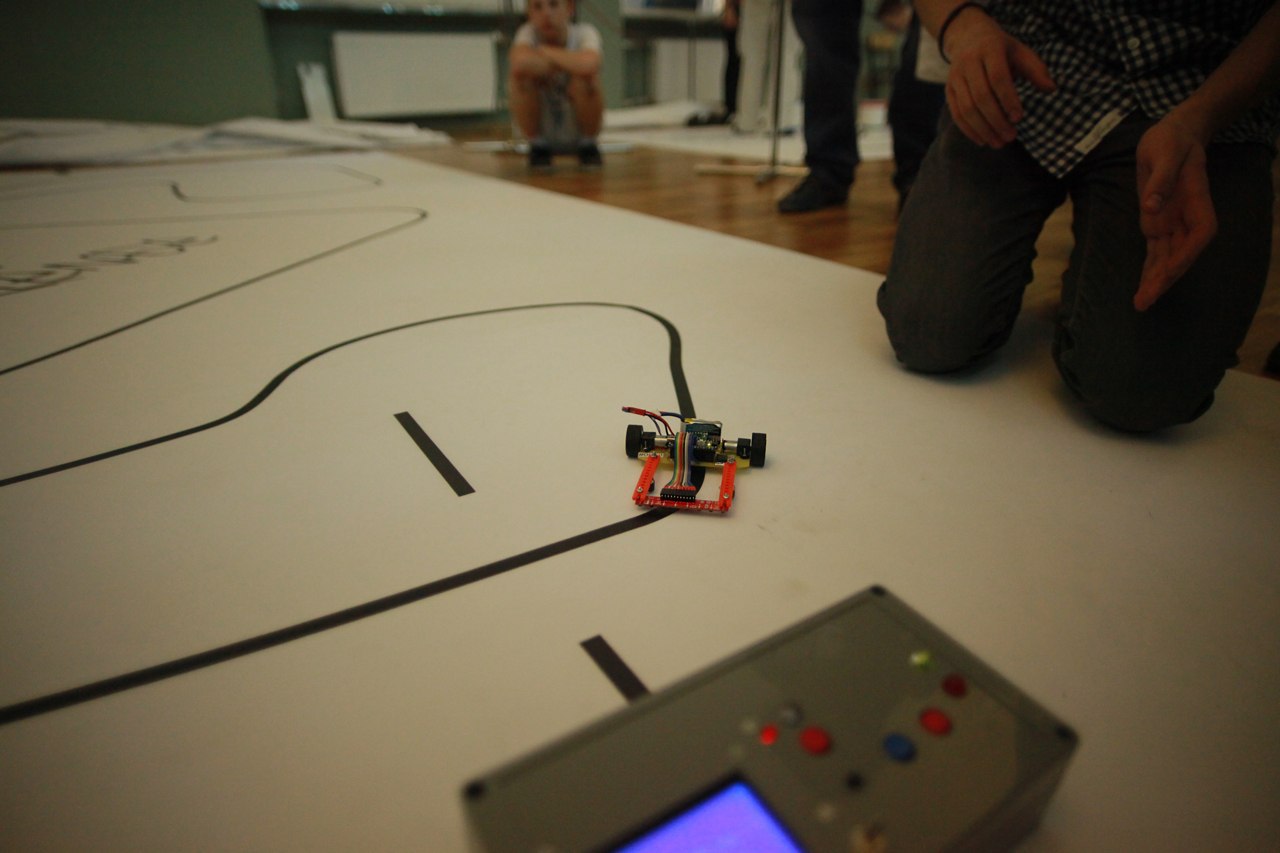
13.00: On the P-controller at 28% speed, the bot completely passed the test track! So the robot turned out in one day.
Conclusion
Arrivals began at 15:30, so there was time to improve the results. I wrote a PD, then Kostya (my partner) took the initiative and with great enthusiasm began to debug and improve the program. We chose the song Muse - Madness as the "anthem" of this robot, when it sounded there was a debugging. During the first attempt, the robot drove the track in 16 seconds, during the second and last at 14.25, the same result as the winner. But he has a better first attempt than ours, so we took second place.

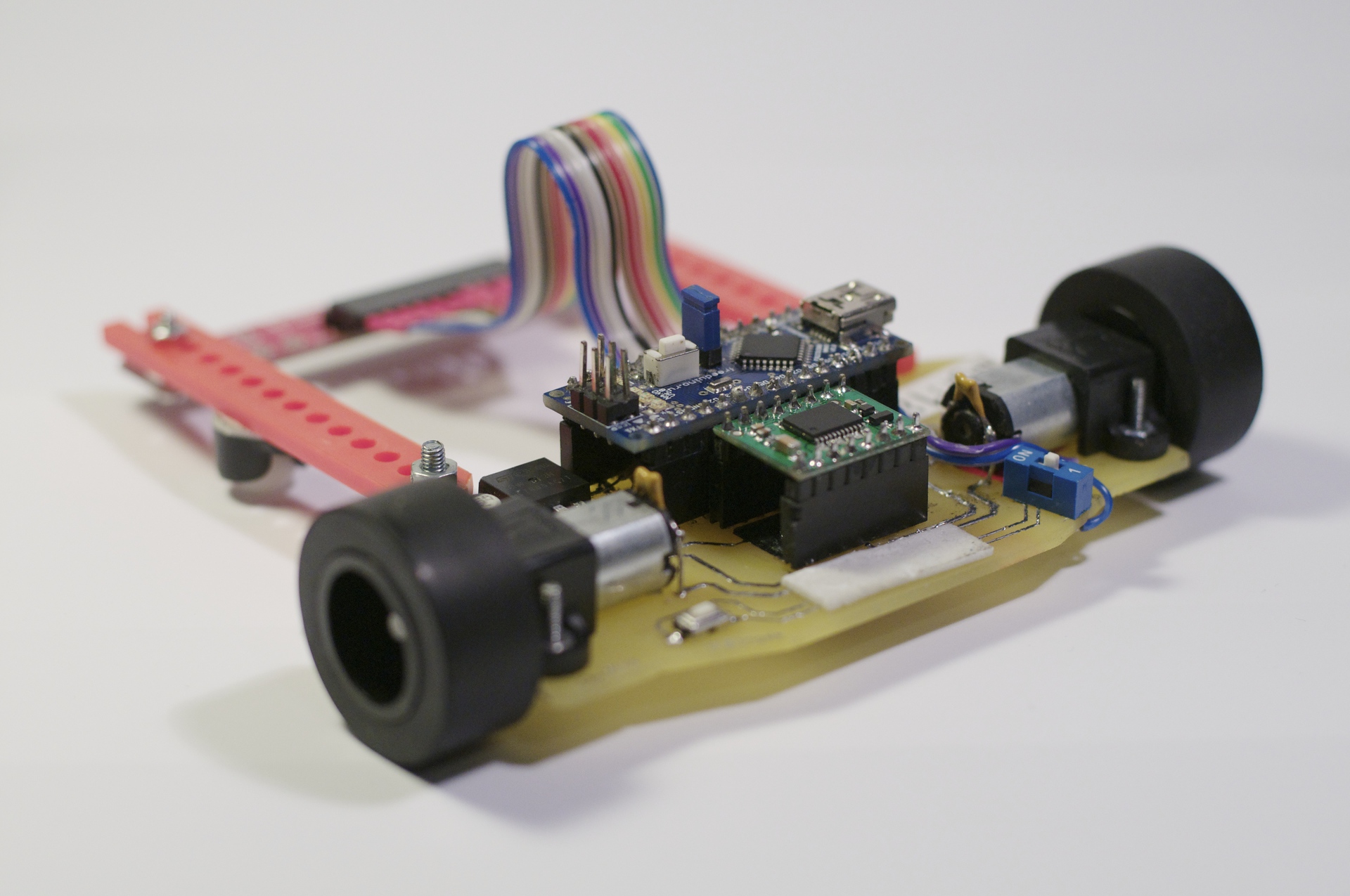
And, in fact, photos of the robot:
Video of arrival:
Preface
So it turned out that this season I was seriously engaged only in micro-sumo: I started making robots in July 2013, finished by the end of March 2014. Competitions are ordinary robosumo, but the mass of the robot should not exceed 100 grams, and the robot itself in the starting position should fit in a cube 5 cm * 5 cm * 5 cm. He exhibited it only at one competition on April 6, where he was the only robot.
Black Python competes with double-sided tape:
Since in St. Petersburg at the moment there are only 2 robots of this class, then this type of competition was not included in the May competitions. And since I wanted to speak, I decided to make a light tracer, a robot for moving along the line in a quick way, since for 5 years there were 10 pieces of robotics enthusiasm (not counting those made from lego).
Design
Since the task was to make the robot in the shortest possible time, I had to resort to a ready-made solution: Freeduino Nano, a modular engine driver and a ready-made sensor strip. The opportunity to start the robot appeared only on Saturday at 12 o’clock.
14.00: A bullet in micronics for the missing details!
15.00: Fuh, I came home with everything I needed.
15.30: I ate, it is possible to design. I really wanted to make a beautiful robot, but the presence of modular parts and a limited amount of time brought it all to naught, so I did not think about the design and layout for a long time.
18.30: Here is the final version of the wiring (there were 2 more).
Fabrication of the construction
At first, the plan was simple: LUT -> cutting the board -> drilling -> soldering -> fastening motors and sensors. But when did everything go without adventures? All that remains is matte paper, which is not comme il faut for LUT, the details are scattered in packages and boxes, etc.
18.35: Well, damn it, it’s not gone too far.
18.40: Well, blin, the toner doesn’t come off, you have to cut the textolite again.
18.50: Fuh, now transferred.
19.00: It was etched, now I’ll drill a saw.
10.19: Cut it out.
19.15: Soldering, soldering and soldering again.
19.30: Ahhh! It’s unrealistic to solder the connectors, so that I would once again make the LUT tracks from the same side as the elements.
20.20: Well, that’s all, just toss the wires from the bottom.
20.40: Oh her, the stabilizer works, does not even get warm. You can take a pizza break.
10.21: It's time to continue making the bot.
21.30: And where is the engine driver?
21.50: Found. Now you need a neat cable to connect the dune with the sensors.
22.20: Well, now the motors. 22.30: Well, why did the mount crack?
22.40: Hmm, and what do rails for a sensor be made of?
10.23: Okay, this is tomorrow's problem.
23.25: Shorty. It is necessary to solder a bit.
23.30: Soldered. It works, it does not heat up.
23.50: Come on, arduino, ask for it already!
00.30: Do not put drivers for her, so what to do. Tomorrow I will change to another. And now we need to get together for the competition and sleep.
9.30: I came to the competition.
10.00: Checked in, chose the field (line thickness -1.5 cm)
12.00: Everything, finished with the design, changed the nanu, put the slats, glued the drags.
12.30: I looked at other species, and you can start to skip.
13.00: On the P-controller at 28% speed, the bot completely passed the test track! So the robot turned out in one day.
Conclusion
Arrivals began at 15:30, so there was time to improve the results. I wrote a PD, then Kostya (my partner) took the initiative and with great enthusiasm began to debug and improve the program. We chose the song Muse - Madness as the "anthem" of this robot, when it sounded there was a debugging. During the first attempt, the robot drove the track in 16 seconds, during the second and last at 14.25, the same result as the winner. But he has a better first attempt than ours, so we took second place.
And, in fact, photos of the robot:
Video of arrival: