Quadcopter: reach for heaven
 Some time has passed after the assembly of my quadrocopter and the previous article .
Some time has passed after the assembly of my quadrocopter and the previous article . Inspired by articles ( 1 , 2 ) of comrade PaulMan decided to write his own. The truth is not so detailed, and not in the form of a tutorial, but rather a story about the first months of using and installing FPV.
Treasured distance
Having flown a day on the field, twisted circles, figure eight and afraid of more complex figures, I wanted higher and longer flights.
Of course, on the second day of owning the equipment, a soap box was attached to it, and the first entries from the board were made.
First recordings (boring and strong vibrations)
First impressions: cool! Before that I knew that I wanted FPV, but then I realized that it would be mine.
At home, there was a cluttered radio “video camera” and a receiver for it, as well as a USB video capture device. Having screwed the camera to the copter, with a laptop armpit ran into the clearing. In principle, the first FPV flight took place ... But in the picture that this miracle transmitted - the Chinese camera, it was difficult to understand what was flying and where.
A decision was made to purchase a normal receiver and transmitter. But choosing them is not so easy ...
Transceiver equipment
For radio models, the most common video signal transmission frequencies are:
- 900 MHz (wavelength: 333.1 mm);
- 1.2-1.3 GHz (wavelength: 234.2 mm);
- 2.4 GHz (wavelength: 124.9 mm);
- 5.8 GHz (wavelength: 51.6 mm).
The longer the wavelength, the better its penetration through objects, but the less data can be transmitted. Also, the size of the antennas directly depends on the frequency.
The quality of the picture (the amount of transmitted data) within these frequencies, it seems, varies insignificantly, although some say that by 5.8 the quality is much better.
Somehow you need to choose. No experience. There is nowhere to see examples. Well, let's start by sifting out:
- 2.4GHz is the WiFi frequency, and I was going to fly in the city. By the way, the frequency is not very popular at all, apparently for this reason.
- 900MHz - huge antennas. And the community is increasingly choosing 1.2 GHz, rather than 0.9.
Remain 1.2 GHz and 5.8 GHz.
Based on the data from the forums (and they vary greatly - someone says that at 5.8 it’s impossible to fly into a lonely tree, but someone assures that he was flying quietly behind the house), decided to consider a lower frequency.
She brings two problems:
- It is desirable that the frequency of the video be higher than the remote control - a longer wave can “interrupt” a short one. I did not want to see, in good quality, how my quadrocopter crashes, losing control.
- The second harmonic of wave 1.2 coincides with 2.4, which further degrades this choice.
And it seems like a logical choice: take 5.8 GHz - and fly with it. But I was very depressed that the forum writes a lot about weak penetrating ability.
In the end, unexpectedly for myself, I decided: I take 1.2-1.3 GHz, I will buy a high-pass filter for it and, if something does not work out, I will buy a 433MHz receiver and transmitter for the remote control.
Next problem: power. Transmitters can range from 10mW to several watts (usually with amplifiers, but still). What kind of power do I need? Many say 800 MW is good. Others say 100 mw above the roof. I figured that I would not be able to spread the video-emitting and receiving control antennas. And the transmitting signal is only 50 MW. 800 MW can “crush” it, not even coinciding in frequency. Moreover, people spoke very reasonably about "100 MW above the roof." I decided to take 200 MW.
I also decided for myself, away from harm's way, to take the kit so as not to be mistaken for compatibility (although everything looked simple - both the receiver and the transmitter must support at least one identical channel).
And so I ordered a 1.3Ghz 400mW transmitter complete with a receiver(yes, not 200, but 400 - changed his mind at the last moment) well, and a filter for him.
Weeks of waiting and practice began.
First-person flights
The long-awaited package has arrived. I took a GoPro Hero 2 from a friend and installed everything on the copter. The first flight - an indescribable feeling. This is a computer game, a type of "flight simulator", with very complex controls and one life, but only in reality.
(The video additionally captures my wife, parents and a dog. But I think no one will be offended.)
In general, it's cool! If you think it is worth it or not, then I advise you: it is worth it! Just read PaulMan’s articles first - it’s very clear there, maybe even in too much detail, it’s written where to start, how to train, etc.
But, of course, everything did not go as smoothly as we would like. The video signal became noisy after 50 meters (but this is in my test glade - noise still sometimes breaks in that place). The remote control during tests on the ground either worked for 300 meters, then lost communication after 100.
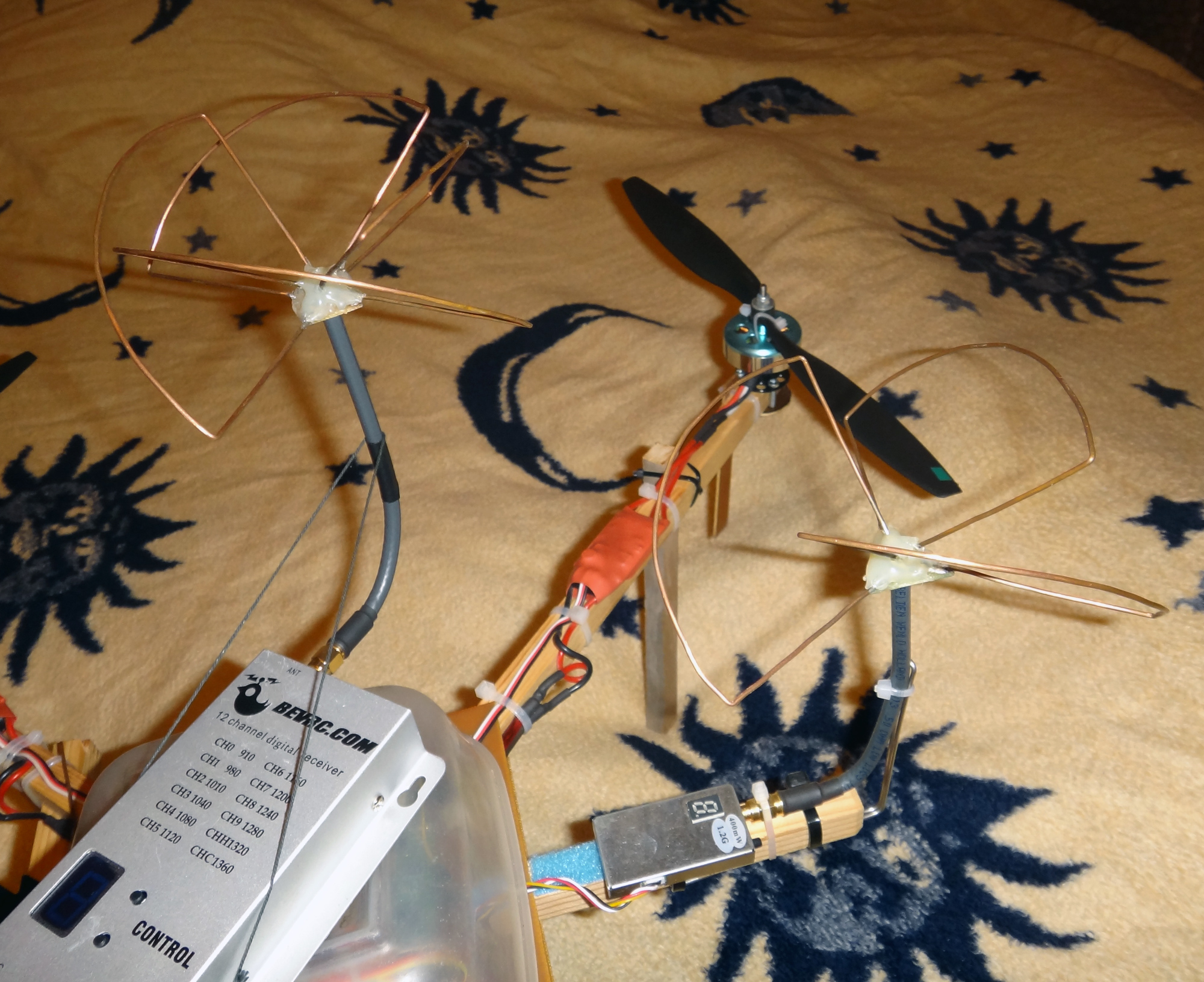 The first thing I decided to remake was the video antenna. I decided to make a 3-petal " clover"to the transmitter and 4-lobe to the receiver. The signal changed several times! The ground test showed a range of 3 kilometers - there was still a signal, but there was nowhere to go further in a straight line. The console still worked for 100-300 meters.
The first thing I decided to remake was the video antenna. I decided to make a 3-petal " clover"to the transmitter and 4-lobe to the receiver. The signal changed several times! The ground test showed a range of 3 kilometers - there was still a signal, but there was nowhere to go further in a straight line. The console still worked for 100-300 meters. After flying one day, I realized that I wanted to fly further! But I couldn’t even fly away to the full range of the remote control - there is no telemetry - there is nothing to receive RSSI (Received Signal Strength Indication). There is no feedback from the remote control either. I
ordered OpenLRS modules for the remote control and for the model . Now By the way, I would take both for the model and build it into the console myself - it’s not so good for Odita And as ordered. the OSD (the On Screen the Display) module Well, junk, of course -. propellers, battery, etc.
Again waiting and training flights with FPV. During this time, I bought GoPro Hero 3 Black.
Having picked up the long-awaited parcel from the post office, I fasten everything to the copter. OpenLRS with original antennas, a suspicious video filter can be thrown out, and the OSD is over - you immediately feel like a fighter pilot!
Naturally, there was a bunch of OpenLRS flashing, and I forgot to order the USB-UART adapter for 3.3 volts, so I had to erase it myself (one FT232RL cost 3 times more than the finished product from there, but it made the card universal for 3.3 and 5 volts ) Once uart was no longer enough - something happened to the bootloader - you need to reflash the programmer, and mine only 5 volts. Well, this, too, was quite simply defeated - the benefit is a homemade programmer on AtMega8.
Now the console has feedback! He squeaks at the loss of packets. I fly off to ~ 150 meters - and a beep sounds. Hmm ... A system for long-distance flights ...
 We must try to make antennas! For the equipment, I chose the simplest Vee-dipoleantennas. And again, the result is magnificent - for all the time there was a squeak with these antennas only once, when I flew over the power line. I didn’t measure the range, but flew 3km to the side and 1km in height - the signal was stable.
We must try to make antennas! For the equipment, I chose the simplest Vee-dipoleantennas. And again, the result is magnificent - for all the time there was a squeak with these antennas only once, when I flew over the power line. I didn’t measure the range, but flew 3km to the side and 1km in height - the signal was stable.Height is calling us
I haven’t flown above the clouds yet. The problem, as it turned out, was not to fly up there, but to then go down! The quadcopter during the descent does not behave stably - and descends not so fast. And throwing it quickly downhill is somehow dumb - all of a sudden something will not stand braking?
In general, while the personal record is 1.1km. This is already in the cumulus clouds, but not above them.
But the goal of course is the high cumulus clouds! I’ll check the quick descents and I can try it!
Alterations, flight times and accidents
For all this time, I did not redo anything (apart from the location of the boards on the device). Only added new equipment:
- FPV;
- Bluetooth
- OSD
- uBEC.
 And of course propellers. For the initial flights I had 10x4.5. Now they stand 12x4.7. And I want to order 15x4 carbon, but I'm afraid the engines can not stand it. I am going to measure in the near future the current that is being consumed now - and draw conclusions on the basis of this.
And of course propellers. For the initial flights I had 10x4.5. Now they stand 12x4.7. And I want to order 15x4 carbon, but I'm afraid the engines can not stand it. I am going to measure in the near future the current that is being consumed now - and draw conclusions on the basis of this. Traction is very decent now, but I always want more. I tried to suspend a DSLR (900 grams). There is still traction margin!
And of course I want to increase the flight time.
Take Off Time
With the initially purchased 2650 mAh batteries, flight time began to decrease with increasing weight. I decided to try to connect both batteries in parallel. Flight time 14 minutes. Excellent. If you just hang, then even more. I ordered 2 batteries of 5000 mAh. Each of them has 15 minutes of summer (one battery is lighter than 2 for 2650) + another 14 on paired old ones. So far enough, but there is still room for improvement.
Houston we have a problem
So far, there has been only one fall:
Not very strong. Basically, the entire description is inside the video. For those who do not want / cannot see a short description: I did not listen to smart uncles and did not put self-tightening clamps on the propellers (well, why, they are holding well). One of them spun up - and began to crank on the axis of the motor.
There were a couple of moments when I thought that everything would be broken. For example, even without FPV, it took off about 150 meters. The quadrocopter is already hard to see, gps then somehow somehow incomprehensibly worked. He began to be carried away - and I don’t even understand where he was facing. It is completely incomprehensible where he leans! But, with grief in half, flew into place. My heart beats, my hands sweat - I also managed to do it in the city! But the good thing is that it ends well.
Instead of a conclusion
Very pleased with my toy. Delivers a lot of pleasure. In populated areas causes great excitement:
Which is generally nice.
Currently in the plans:
- as already said the larger propellers;
- good camera stabilization system (I assembled one, but I had very low-quality servos, which lost all its meaning);
- glasses for FPV are possible;
- Well, I want to raise the SLR and take a couple of high-quality photos (so far only a test flight of 15 meters has taken place).
As usual, I have nothing specific in the article, but some stories. Do not judge strictly.
Ask any questions - I will answer as I can.
Thanks to those who read to the end.
PS: please, do not say what to assemble from the finished is nonsense, you have to do your own thing. I have a different opinion: it makes no sense to poison the board myself, if only the components cost more than the finished one. And the software itself to write from scratch makes little sense. I'd rather spend time helping the MultiWii project — there’s no reason to reinvent the wheel in such a business. But after hundreds of useful commits, it is possible and possible to start something different.