Finger topology
Topology - a rather beautiful, sonorous word, very popular in some non-mathematical circles, interested me in the 9th grade. Of course, I didn’t have an exact idea, however, I suspected that everything was tied to geometry.
What is a topology ? I must say right away that there are at least two terms “Topology” - one of them simply denotes a certain mathematical structure, and the second carries an entire science. This science consists in studying the properties of an object that will not change when it is deformed.

We see that the circle transforms into a donut by continuous deformations (in the common people “two-dimensional torus”). It has been observed that topology studies what remains unchanged under such deformations. In this case, the number of “holes” in an object remains unchanged - it is one. Let’s leave it as is, a little later we’ll figure it out for sure)

By continuous deformations, a person (see figure) can unravel his fingers - a fact. Not immediately obvious, but you can guess. And if our topological person prudently put the watch on one hand, then our task will become impossible.
So, I hope a couple of examples have brought some clarity to what is happening.
Let's try to formalize it all in a childish way.
We assume that we are working with plasticine figures, and we can stretch, compress plasticine , while bonding different points and tears is prohibited . Homeomorphic are called figures that are translated into each other by continuous deformations described a little earlier.

A very useful case is a sphere with handles. A sphere can have 0 handles - then it’s just a sphere, maybe one - then it’s a donut (in common people a “two-dimensional torus”), etc.
So why does a sphere with handles stand apart from other figures? Everything is very simple - any figure is homeomorphic to a sphere with a certain number of handles. That is, in fact, we don’t have anything else O_o Any voluminous object is arranged as a sphere with a certain number of handles. Be it a cup, spoon, fork (spoon = fork!), A computer mouse, a person.
This rather substantive theorem is proved. Not by us and not now. More precisely, it is proved for a much more general situation. Let me explain: we limited ourselves to considering figures molded from plasticine and without cavities. This entails the following troubles:
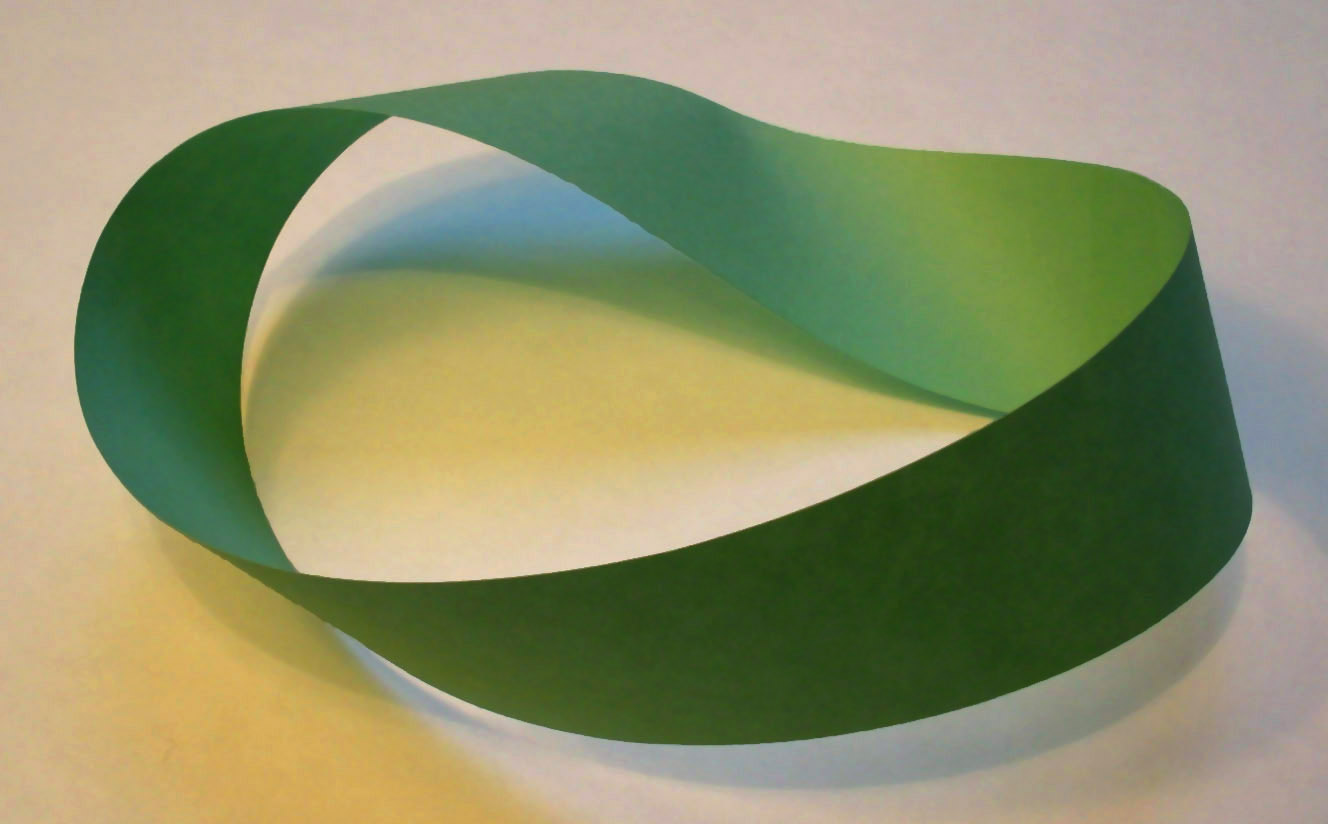
1) we can’t get a non-orientable surface in any way (Klein bottle, Mobius strip, projective plane),
2) we restrict ourselves to two-dimensional surfaces (n / a: sphere is a two-dimensional surface),
3) we can’t get surfaces, figures that extend to infinity (of course you can imagine this, but no plasticine is enough).

Comment: self-intersection is depicted, which we forbade initially. In fact, if we consider embedding in four-dimensional space, then we can get rid of self-intersections, but “More Than Three-Dimensional” spaces are not visible.
Non-orientable surfaces are notable for the fact that they do not divide the space into two parts, for example, because sphere.
But it is not all that bad. More precisely, everything is just as good as in the oriented case - any non-orientable two-dimensional surface (it’s also right to add: compact, connected, without edge) is homeomorphic to a sphere with a certain number of “Mobius films”) and handles. By the way, the Klein Bottle is a sphere with two Mobius films.
We familiarized ourselves with the simplest presentation of the essence of continuous mappings (deformations), implicitly formulated a classification theorem for two-dimensional compact connected surfaces without an edge, and familiarized ourselves with the notion of orientability on fingers.
Next, we will talk about the connection of topology with other branches of mathematics / mechanics, I will try to find some highlights.
Words and text were selected in such a way that everything was "intuitively clear." As a result, a complete lack of mathematical literacy.
What is a topology ? I must say right away that there are at least two terms “Topology” - one of them simply denotes a certain mathematical structure, and the second carries an entire science. This science consists in studying the properties of an object that will not change when it is deformed.
Illustrative example 1. Cup bagel.
We see that the circle transforms into a donut by continuous deformations (in the common people “two-dimensional torus”). It has been observed that topology studies what remains unchanged under such deformations. In this case, the number of “holes” in an object remains unchanged - it is one. Let’s leave it as is, a little later we’ll figure it out for sure)
Illustrative example 2. Topological person.
By continuous deformations, a person (see figure) can unravel his fingers - a fact. Not immediately obvious, but you can guess. And if our topological person prudently put the watch on one hand, then our task will become impossible.
Let's make it clear
So, I hope a couple of examples have brought some clarity to what is happening.
Let's try to formalize it all in a childish way.
We assume that we are working with plasticine figures, and we can stretch, compress plasticine , while bonding different points and tears is prohibited . Homeomorphic are called figures that are translated into each other by continuous deformations described a little earlier.
A very useful case is a sphere with handles. A sphere can have 0 handles - then it’s just a sphere, maybe one - then it’s a donut (in common people a “two-dimensional torus”), etc.
So why does a sphere with handles stand apart from other figures? Everything is very simple - any figure is homeomorphic to a sphere with a certain number of handles. That is, in fact, we don’t have anything else O_o Any voluminous object is arranged as a sphere with a certain number of handles. Be it a cup, spoon, fork (spoon = fork!), A computer mouse, a person.
This rather substantive theorem is proved. Not by us and not now. More precisely, it is proved for a much more general situation. Let me explain: we limited ourselves to considering figures molded from plasticine and without cavities. This entails the following troubles:
1) we can’t get a non-orientable surface in any way (Klein bottle, Mobius strip, projective plane),
2) we restrict ourselves to two-dimensional surfaces (n / a: sphere is a two-dimensional surface),
3) we can’t get surfaces, figures that extend to infinity (of course you can imagine this, but no plasticine is enough).
The Mobius strip
Klein Bottle
Comment: self-intersection is depicted, which we forbade initially. In fact, if we consider embedding in four-dimensional space, then we can get rid of self-intersections, but “More Than Three-Dimensional” spaces are not visible.
Non-orientable surfaces are notable for the fact that they do not divide the space into two parts, for example, because sphere.
But it is not all that bad. More precisely, everything is just as good as in the oriented case - any non-orientable two-dimensional surface (it’s also right to add: compact, connected, without edge) is homeomorphic to a sphere with a certain number of “Mobius films”) and handles. By the way, the Klein Bottle is a sphere with two Mobius films.
Subtotal
We familiarized ourselves with the simplest presentation of the essence of continuous mappings (deformations), implicitly formulated a classification theorem for two-dimensional compact connected surfaces without an edge, and familiarized ourselves with the notion of orientability on fingers.
Next, we will talk about the connection of topology with other branches of mathematics / mechanics, I will try to find some highlights.