Tricopter (DIY quadcopter: Part II.2)
- Transfer
 Of course, I remember that I promised to write the third part about GPS flights and other buns, but it happened that I spent the whole summer with my son, soldering iron and Arduino IDE, and not in the copter field, so now my free translation of the article by Swede David Windestål I hope I wrote correctly) about the construction of a tricopter - an pepelats with three motors and a rotary mechanism to compensate for rotation and control the rotation. (a big request not to go without special need to the original website, since it often falls without a hub, and there are a lot of pictures under the cut)
Of course, I remember that I promised to write the third part about GPS flights and other buns, but it happened that I spent the whole summer with my son, soldering iron and Arduino IDE, and not in the copter field, so now my free translation of the article by Swede David Windestål I hope I wrote correctly) about the construction of a tricopter - an pepelats with three motors and a rotary mechanism to compensate for rotation and control the rotation. (a big request not to go without special need to the original website, since it often falls without a hub, and there are a lot of pictures under the cut)Since the construction of the tricopter of the first version, I have been trying to find ways to improve the design: constantly changing propellers, motors, speed controllers, beam lengths, swivel mechanism, etc. Often I changed a bunch of everything before each flight. In general, I constantly tried to find the best option for myself.
I love screeds. They make the construction process easy and quick. They break when falling, taking energy on themselves and are the key to a crash-resistant tricopter. Instead of changing the axis of the motors, which is bent, it is easier to replace the torn screed. And most importantly - it is very simple to do in the field.
Main details
(Note: you can use any other similar parts)
Motors: DT750 750kV Speed
controllers: TURNIGY Plush 18amp
Battery: 3s Turnigy 25-35C 2200mAh LiPo
Serva: BMS-385DMAX Digital Servo Metal Gear
Propellers: GWS 10 * 4.7 or GWS 11 * 4.7 if you need to lift something heavier
Long is better: about 50 cm (from the center to the motor axis)
Take-off weight: 860 grams (including the battery or 670 grams without it)
Flight time: about 12 minutes
Hanging current: about 10 Amp
Motors test: 13.2 A@11.7V - 7770RPM - 1080 grams per motor (thrust)
Frame details
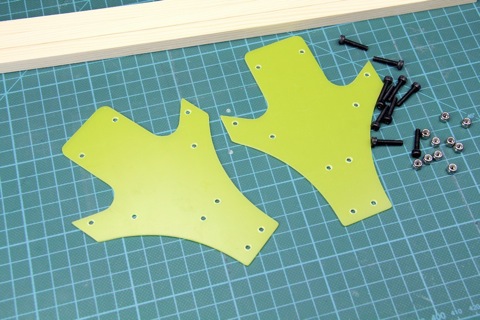
I still like the central part from the tricopter of the first version and a friend happily cut some for me on a CNC machine.
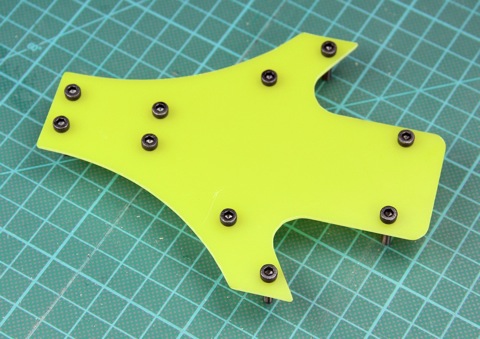
It will take 10 pieces of M3x16 mm bolts.

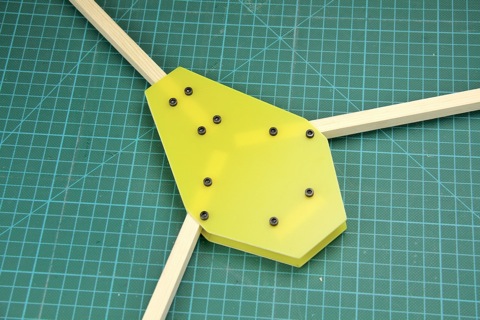
And three rays of the same length. I cut 48cm rays of 10x10 mm from pine.

The holes in the front beams are drilled 25mm from the edge. This is more than planned for the workpiece, but additional material adds strength to the entire frame, like a small piece of wood in front of a long 40mm.
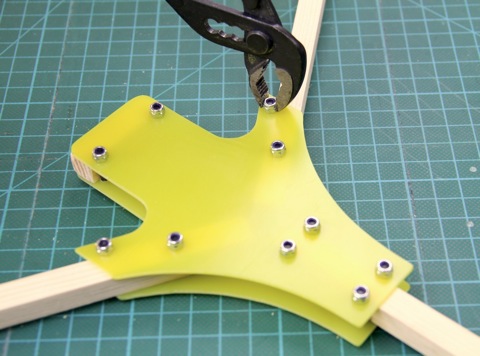
The time has come to twist all this M3 nuts with fixation. Arrange the beams before tightening the nuts. The beams should be in contact with the bolts when unfolded. Be careful not to overtighten the nuts, but they must be tightened so that they hold the beams during the flight. Well, the main part of the frame is ready.
You can also use a simpler central part. At the same time, it will come in handy if you have to hang a lot of equipment. Just circle the main drawing in the corners and it will be easier to cut if there is no CNC machine, since all the lines are straight.
Speed controllers

Time to “fix” speed controllers. Remove heat shrink from them (be careful, do not damage the inside).
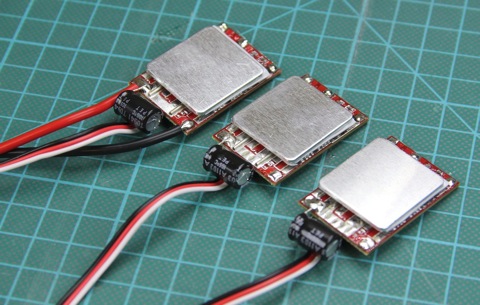
Remove all wires (except 3-wire) from two speed controllers, and on the third leave also power wires. This third regulation will be on the tail and it just so happens that the length is just enough. (Note: check if you have enough length with other speed controllers).
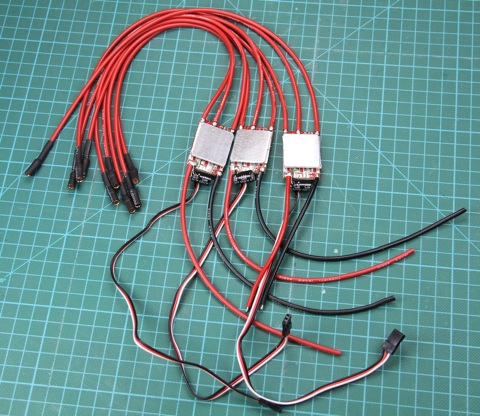
Use a 16AWG cable to extend the wires. I also recommend soldering the connectors for the motor. And use heat shrink to protect the regulator from dust and dirt.
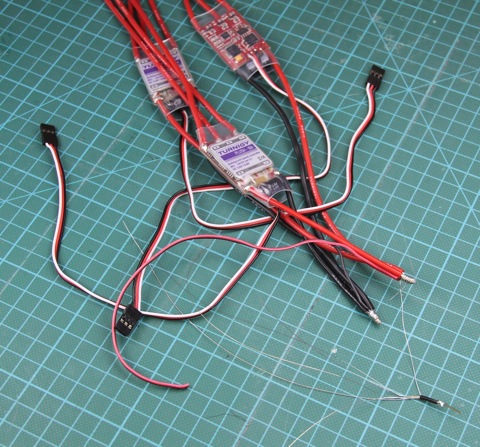
It's time to solder all the power wires together. In order not to suffer when soldering, wrap the wires with wire, this will help keep them together.
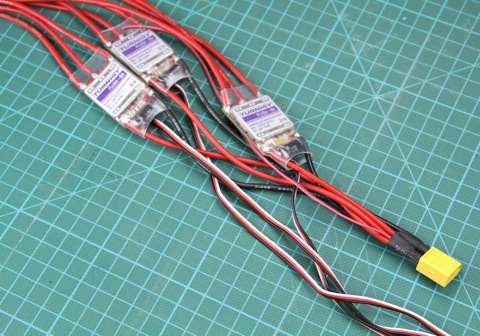
Solder the power connector and you're done.
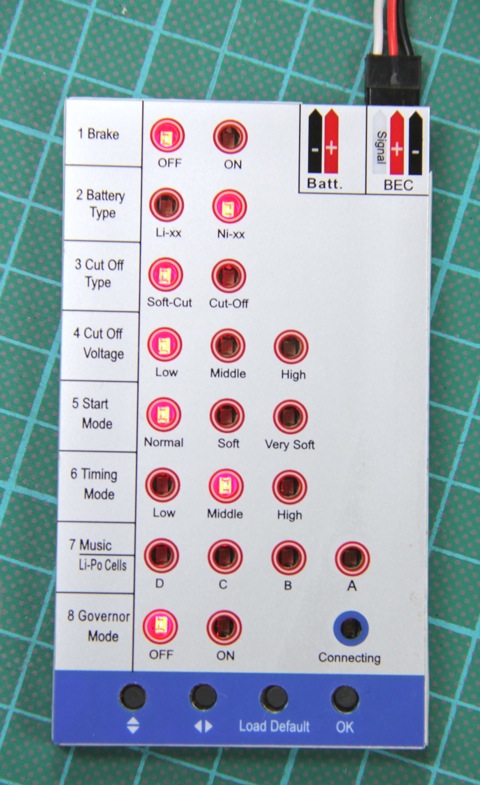
We program speed controllers. I used the card for programming and such settings are suitable for my speed controllers. (Note: it is not necessary to use the card for programming the controllers; you can use the instructions in your instructions for the controllers).
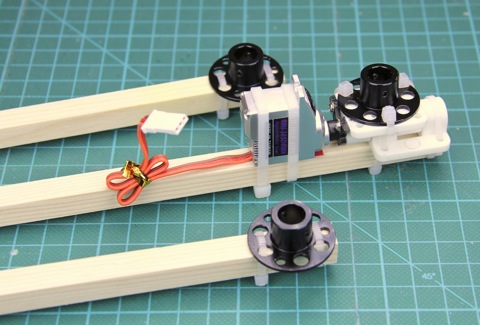
Swivel mechanism

The time has come for the rear engine rotation mechanism. This is a bag with 40mm front wheel mounts . Only $ 2.5 for a two and a half knot turn.

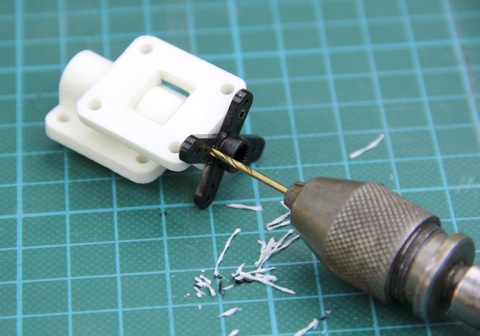
Take two of these things and drill a 4.2mm hole in one of them.
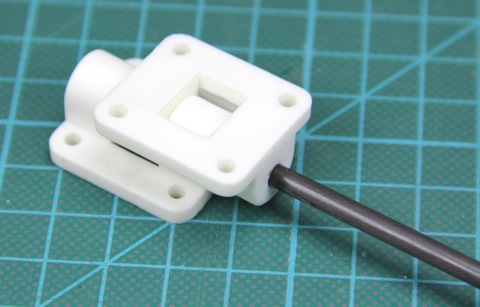
We will remove all debris after drilling and insert a 4mm axis (note: for example a carbon tube from a fishing rod) . She clearly fixes in the part that is not drilled. I’ll have to try to insert one into the other.
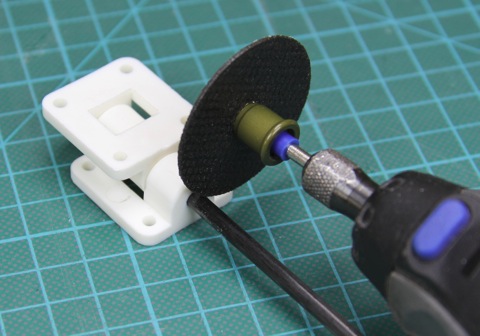
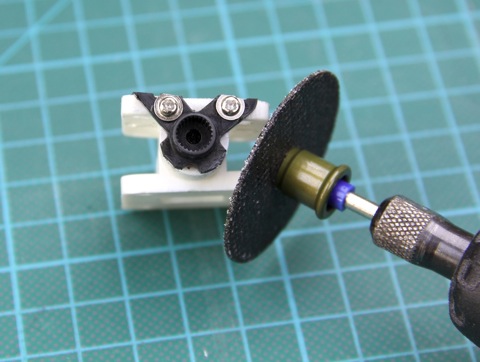
Saw off the excess. I used a dremel with a disk.

Stitch bumps on the part that was drilled.
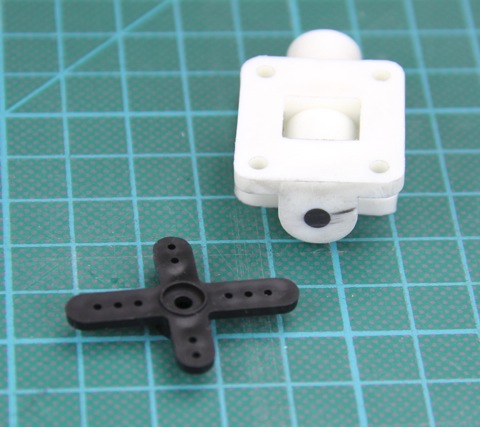
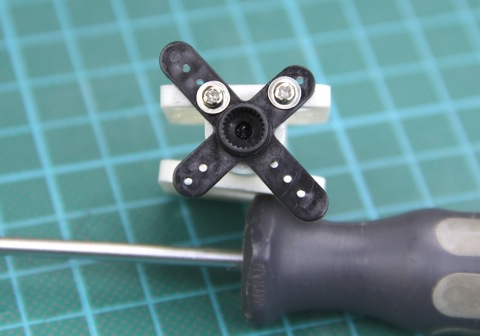
It's time to connect the rotary mechanism to the servo. The used server came with a cross mount, which is perfect for us.

Let's make the crosspiece flat.

And glue to the rotary mechanism, so that later it would be easier to drill, and it will stay stronger. A couple of important things: we glue the cross on the part that was not drilled and try to ensure that its hole matches the shaft installation location. If it does not work, then there will be an extra load on the servo.
Now let's drill two 1.2mm holes. Drill a little deeper than the length of the screws with which you will then fasten it.
And fix with screws, for example from a shallow servo.
Cut off the excess.
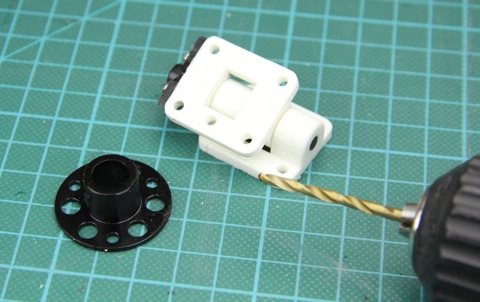
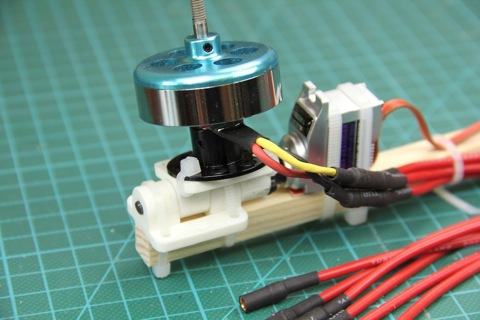
DT750 mounts are very suitable for such a mechanism. You just have to drill one hole in the rotary mechanism, where the motor will be mounted (and where the crosspiece is screwed from the servo).

Three 2.5mm ties are all that is needed to secure the motor. It is better to fix the couplers as shown in the picture so as not to interfere with the deflection of the rotary mechanism.

And now we’ll remodel the servo a bit, cutting off the bottom of the mount. To make the server fit in height, you will have to add 0.8mm fiberglass or grind the rotary mechanism to these same 0.8mm.

The swivel mechanism is ready. It remains only to tighten the ties to the rear beam.

We attract the servo with thicker ties. When installing the screeds, make sure that the screed locks are on opposite sides of the beam.
Motors and Assembly
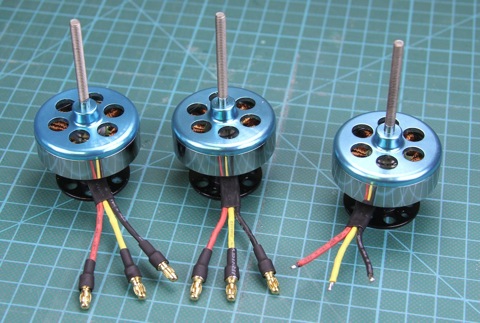
Let's start soldering the connectors to the DT750 motors. I love DTshki. They are quite effective, I have high torque. This means that the propellers will be able to change rotation speed faster and the tricopter will be more stable and have a good response. I also like a 4mm threaded shaft on which you can install propellers without unnecessary fastenings.

But the weak point of these motors at the junction of the wires with the winding. If you move the wires back and forth, then most likely they will just fall off. To fix this and make the engines more durable - we fix this place with epoxy.

The axis of the engine protrudes slightly from the motor mount, so I made a small depression in the beam to prevent friction. Friction of the motor against the beam will cause unnecessary vibrations, so the easiest and fastest way is to make a small recess with a drill.
We connect the 2.5mm motor coupler to the beam. Simple, cheap and fast. And it will save the motor during a collision with ground / asphalt, etc.

The axles of the motors are too long, which adds the risk of damage to the motor during a fall (and vibration is stronger). I cut off the excess, leaving about 21mm, which is enough for the GWS propellers and bolt.

Now put the engines in place. Always use something to fasten the bolts, otherwise they will unwind in vibration from vibrations in flight.
Install the rear motor so that the wires are perpendicular to the beam, then they will not cling and rub against the servo.
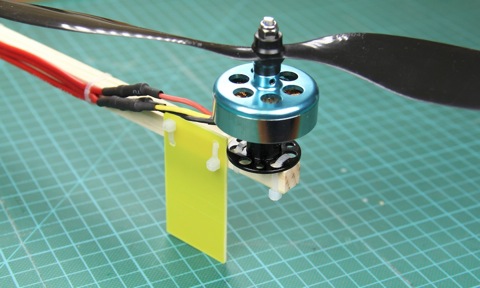
Landing gears are secured with ties and the propeller is mounted on the motor. The propeller will have to be bored to 4mm. Use special bolts to prevent the propeller from falling off over time.

We install speed controllers, as well as an extension cord for servos.
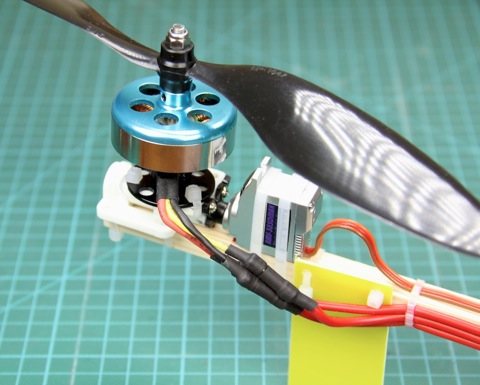
Such a tail rotation mechanism has low friction and is quite durable. Serva is mounted vertically so as not to interfere much with the air flow from the screw. I like the direct servo drive when there are no flimsy and unnecessary parts.
Depreciation of the camera and flight controller
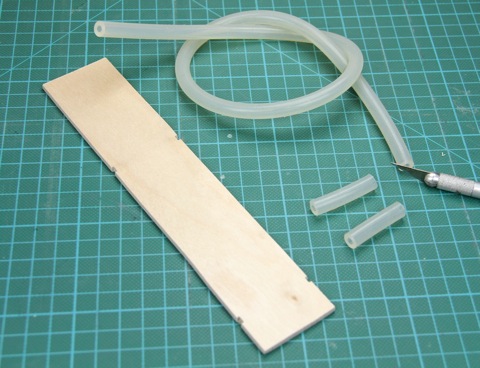
It's time to talk about mounting the battery and camera (note: hereinafter I will call it a suspension) . To prevent vibrations, I used 2 pieces of 38mm silicone tubing (note: fuel hose or tube for an aquarium in a pet store). 8mm outer diameter and 3mm inner.
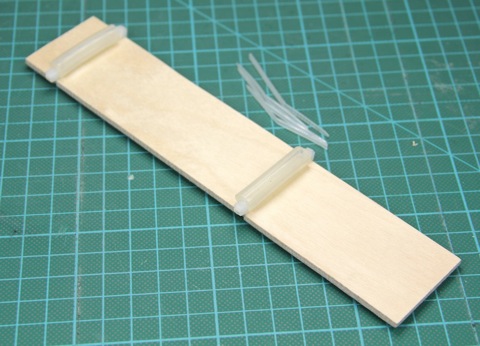
I used 2.5mm ties (all of a sudden!) To fasten the tubes to the suspension.
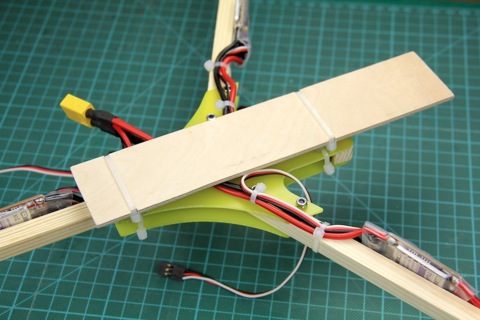
The suspension is attached from below with the same 2.5mm ties.

I still like the KapitanKuk (KK) controller, you can buy it anywhere (note: or even better, buy for example MultiWii or another flight controller with automatic alignment to the horizon) .
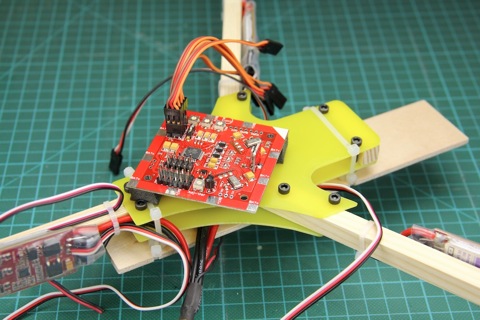
To fix the flight controller, I used squares from several layers of thick adhesive tape. Just stick them on it and on the frame.
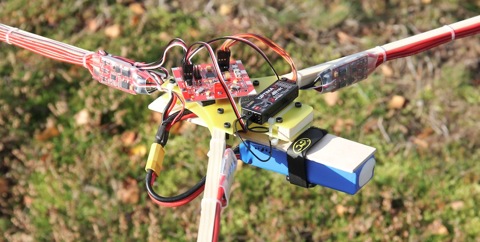
Add the battery and ready to fly.

The frame is assembled. Pretty convenient for transportation.
I hope I liked the translation, in fact the translator from me is so-so - I barely passed tests / exams at school and university
A few video flights on this tricopter
and much more on the author’s channel on youtube .
Where to find the details?
Most of the details can be bought at hobbyking.com , and you can also save some money by using this site with buddy codes for discounts.
And on goodluckbuy.com there is a whole section for multi-copters , in particular, you can find quite cheap flight controllers there (and even whole copters), but it should be borne in mind that not all controllers support a tricopter frame.
Full parts list and replacements possible
What is meant by replacement - I personally put it on my tricopter.
| Name | Minimum | Used in the article | Alternative |
|---|---|---|---|
| Motor | 3 | DT750 750kv - $ 11.60 | KDA20-22L - $ 14.72 |
| Speed controllers | 3 | TURNIGY Plush 18amp - $ 11.90 | HobbyKing 30A BlueSeries - $ 10.47 (actually 30A is overkill) |
| Serva | 1 | BMS-385DMAX - $ 20.48 | BMS-621MG - $ 23.80 (very large, not recommended) |
| Propellers | 3 | GWS 1047 - $ 4.82 or GWS 1147 - $ 5.76 | 10x6 - $ 3.48 or 11x4.7 - $ 5.98 |
| Batteries | 1 | 3s Turnigy 25-35C 2200mAh LiPo - $ 8.99 | Turnigy nano-tech 2200mah 3S 25 ~ 50C Lipo - $ 17.99 |
| Flight controller | 1 | HobbyKing Multi-Rotor Control Board V2.1 (Atmega168PA) - $ 14.99 | Crius MultiWii Lite - $ 47.52 (actually analogous, but sensors separately, Arduino separately) |
| Swivel Parts | 1 | Front Wheel Steering Arm & Mount Set 40mm (5sets) - $ 2.59 | |
| Rest | There is still much that you need, such as bolts, nuts, wires, fiberglass for the frame, aluminum beams or wood, but all this can be found in neighboring stores or on the same hobbyking.com | ||
| TOTAL | $ 122.37 - $ 123.31 | $ 170.95 - $ 173.45 | |
To this price you need to add the cost of delivery, as well as take away the discount that you can get here .
Of course, the tricopter will also need control equipment and a battery for it.