First bolt
Microsoft Robotics Studio is an environment for modeling and programming robots. You can program in languages such as C #, Visual Basic and the built-in visual programming language VPL (Visual Programming Language). The program is not new, but there is very little information on the Internet, you can find only a description of the program itself and a couple of standard examples.
Download Microsoft Robotics Studio
In the series of my articles I want to describe the laboratory work http://msdn.microsoft.com/en-us/library/dd772008.aspx . In my spare time I translated them, tested them and I want to describe them. By the way, they are immediately upon installation: Samples \ VplHandsOnLabs \
The first laboratory work tells how you can control a robot using a manipulator. We need two services: the manipulator - Desktop Joystick and the sensor, which is responsible for receiving data for the wheels, which is called the Generic Differential Drive (GDD).
We drag them onto the diagram and link:

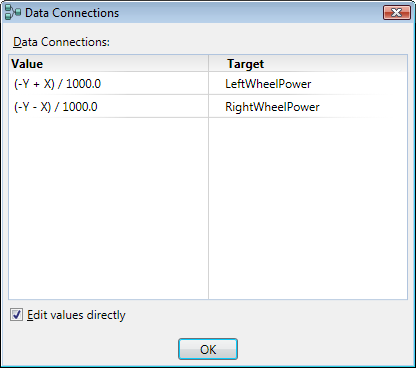
The connection properties from the side of the Desktop Joystick are very important, we put UpdateAxes, i.e. every time we transmit new changes on the side of the manipulator. And for GDD, we install SetDrivePower, which sets the wheel power according to the given formula:

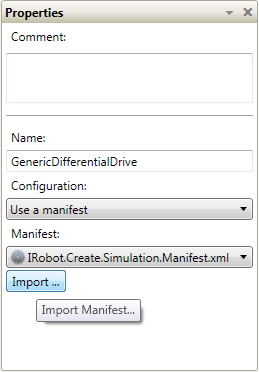
There are many types of robots in Robotics, which can also easily work at the physical level, which communicates via Bluetooth or infrared. Your written diagram can run on other robots, choosing the manifest you need (settings for a particular robot in .xml format). For our chart, we select iRobot Create, which by the way will be used in some other laboratory works.
To the right (standard) on the Properties panel, we select Use manifest , click Import and select our robot, which we agreed to use:
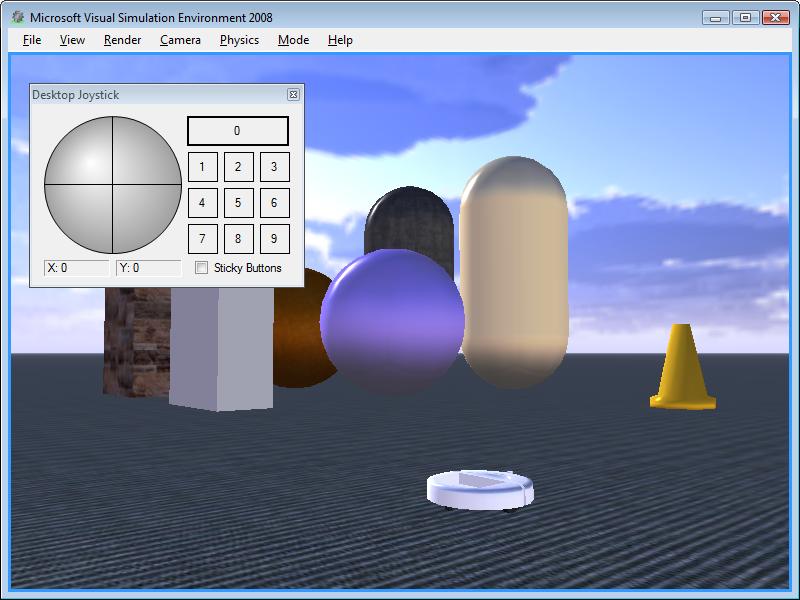
Save and press F5 and get the standard environment and our robot, which is controlled using Desktop Joystick, at the output.
This work is very simple, next time I will describe how to program sensors on a robot.
Download Microsoft Robotics Studio
In the series of my articles I want to describe the laboratory work http://msdn.microsoft.com/en-us/library/dd772008.aspx . In my spare time I translated them, tested them and I want to describe them. By the way, they are immediately upon installation: Samples \ VplHandsOnLabs \
The first laboratory work tells how you can control a robot using a manipulator. We need two services: the manipulator - Desktop Joystick and the sensor, which is responsible for receiving data for the wheels, which is called the Generic Differential Drive (GDD).
We drag them onto the diagram and link:
The connection properties from the side of the Desktop Joystick are very important, we put UpdateAxes, i.e. every time we transmit new changes on the side of the manipulator. And for GDD, we install SetDrivePower, which sets the wheel power according to the given formula:
There are many types of robots in Robotics, which can also easily work at the physical level, which communicates via Bluetooth or infrared. Your written diagram can run on other robots, choosing the manifest you need (settings for a particular robot in .xml format). For our chart, we select iRobot Create, which by the way will be used in some other laboratory works.
To the right (standard) on the Properties panel, we select Use manifest , click Import and select our robot, which we agreed to use:
Save and press F5 and get the standard environment and our robot, which is controlled using Desktop Joystick, at the output.
This work is very simple, next time I will describe how to program sensors on a robot.