Robots will build a base on the moon
According to NASA's plan, a lunar base suitable for human settlement should open in 2020. But to begin its construction, it is necessary to prepare a spaceport for landing and launching missiles. Obviously, robots will do it.
By NASA order, Astrobotic Technology, together with specialists from the Institute of Robotics at Carnegie Mellon University, conducted a study ( PDF ) of which robots are needed for construction.

We are publishing key fragments from this report.
At the first stage, it is required to level the regolith (lunar soil) under landing sites and roads, clear the area of fragments of meteorites and other debris, dig trenches for cables and other infrastructure, build protective embankments and fix the landscape.
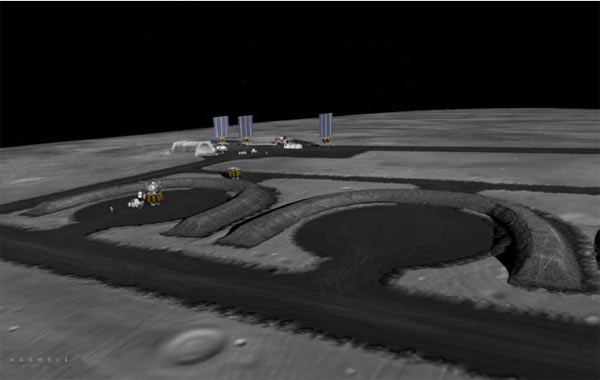
Protective embankments are necessary in order to protect the surrounding regolith and structures from melting, which is inevitable in the process of numerous landings and missile launches.
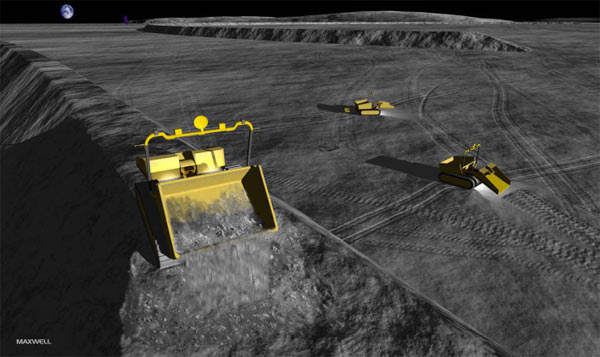
Now scientists are figuring out how powerful excavators and bulldozers weighing no more than 300 kg in lunar gravity will be, how quickly they can work. According to preliminary estimates, they will be able to build protective embankments within six months.
To effectively move the regolith, it is planned to apply several complementary technologies: 1) bodies on excavators will increase the load capacity of robots; 2) vibration under pressure for a denser ramming of the material; 3) paving with stones collected on local soil.
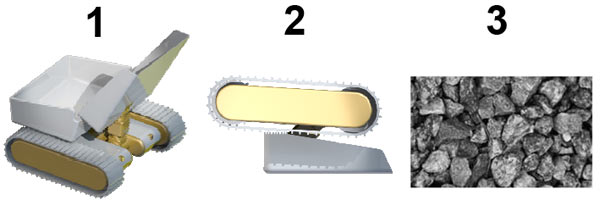
Accordingly, for tamping and paving robots are equipped with special devices. For an effective robot design, scientists need more information about the size and number of stones on the surface of the moon.
The algorithm for moving robots for maximum efficiency will be as follows (with excommunication cycles for recharging).
According to calculations, two excavators with bodies, each weighing 150 kg, can build a mound in 152 days (5 months) with an average body load of 30%, a moving speed of 15 cm / s and when estimating that 1200 tons of regolith should be moved.
Excavators will spend three quarters of the entire time on the road, so the speed and accuracy of their movement is a key indicator. It is assumed that they will not have a full-fledged own navigation system. All control will be carried out by operators from the Earth in real time, as well as in a partially autonomous mode under the supervision of operators.
By NASA order, Astrobotic Technology, together with specialists from the Institute of Robotics at Carnegie Mellon University, conducted a study ( PDF ) of which robots are needed for construction.
We are publishing key fragments from this report.
At the first stage, it is required to level the regolith (lunar soil) under landing sites and roads, clear the area of fragments of meteorites and other debris, dig trenches for cables and other infrastructure, build protective embankments and fix the landscape.
Protective embankments are necessary in order to protect the surrounding regolith and structures from melting, which is inevitable in the process of numerous landings and missile launches.
Now scientists are figuring out how powerful excavators and bulldozers weighing no more than 300 kg in lunar gravity will be, how quickly they can work. According to preliminary estimates, they will be able to build protective embankments within six months.
To effectively move the regolith, it is planned to apply several complementary technologies: 1) bodies on excavators will increase the load capacity of robots; 2) vibration under pressure for a denser ramming of the material; 3) paving with stones collected on local soil.
Accordingly, for tamping and paving robots are equipped with special devices. For an effective robot design, scientists need more information about the size and number of stones on the surface of the moon.
The algorithm for moving robots for maximum efficiency will be as follows (with excommunication cycles for recharging).
According to calculations, two excavators with bodies, each weighing 150 kg, can build a mound in 152 days (5 months) with an average body load of 30%, a moving speed of 15 cm / s and when estimating that 1200 tons of regolith should be moved.
Excavators will spend three quarters of the entire time on the road, so the speed and accuracy of their movement is a key indicator. It is assumed that they will not have a full-fledged own navigation system. All control will be carried out by operators from the Earth in real time, as well as in a partially autonomous mode under the supervision of operators.