Mom sleeps at night - we collect OpenCV for Raspbian
- Tutorial
The last couple of weeks have been tough for our team. Let OpenCV 4 , and with it, preparing for the Intel's OpenVINO toolkit The R4, which includes OpenCV. You think, I’ll distract for a while, I’ll see, as usual, the OpenCV forums, yes user comments, and then you, it became fashionable to say that OpenCV is not IoT, that under Raspberry Pi to collect - there is not enough solder, what to make -j2put up for the night - it will be ready in the morning , if you're lucky.
Therefore, I propose to join hands and see how you can build the OpenCV library for a 32-bit operating system running on an ARM processor using machine resources with a 64-bit OS driven by an excellent CPU architecture. Witchcraft Cross compilation, no other way!
Formulation of the problem
Compiling directly on the board, usually called native, is really time consuming, so we’ll consider here a way to build a project that allows stronger computing devices (let's call them hosts) to prepare binaries for their small relatives. Moreover, both machines may have different CPU architectures. This is cross-compiling.
So, for the preparation of raspberry pie stuffed with OpenCV, we need:
- Carcass docker image of Ubuntu 16.04
- The host machine is more powerful than the Raspberry Pi (otherwise what’s the point, isn't it?)
- Cross compiler for ARMhf, as well as libraries of the corresponding architecture
The entire build process of OpenCV will occur on the host machine. I use Ubuntu in my home. With another version of Linux, problems with reproduction should not arise. For Windows users, my sincere wishes not to give up and try to figure it out.
Docker installation
I started my acquaintance with docker about a week ago, so gourmets should add salt and syntactic sugar to taste. We have enough with you three ingredients - Dockerfile, the concept of the image and the container.
Docker itself is a tool for creating and reproducing the configuration of any operating system with the required set of components. A dockerfile is a set of shell commands that you usually use on a host machine, but in this case they all apply to the so-called dockerimage.
In order to deliver the docker, consider the easiest way: order a package through the delivery service apt-get:
sudo apt-get install -y docker.ioWe'll give the docker daemon everything he asks for and logout from the system (notice login accordingly).
sudo usermod -a -G docker $USERPreparing the workspace
Raspberry Pi (in my case RPI 2 Model B) in the most common preparation is the ARMv7 CPU with the Raspbian (Debian based) operating system. We will create an dockerimage based on Ubuntu 16.04, in which we report the cross-compiler, arm libraries, and in the same place we will assemble OpenCV.
Create a daddy, where our will lie Dockerfile:
mkdir ubuntu16_armhf_opencv && cd ubuntu16_armhf_opencv
touch DockerfileAdd information about the base OS and armhfarchitecture for the package installer apt-get:
FROM ubuntu:16.04
USER root
RUN dpkg --add-architecture armhf
RUN apt-get updateNote the type of team FROM ..., RUN ...- the syntax dockerand written to create a test file Dockerfile.
Let's go back to the parent directory ubuntu16_armhf_opencvand try to create our docker image:
docker image build ubuntu16_armhf_opencvDuring the execution of the command, apt-get updateyou should lead to see errors of the following kind:Err:[число] [url] xenial[чего-нибудь] armhf Packages
Ign:30 http://archive.ubuntu.com/ubuntu xenial-backports/main armhf Packages
Ign:32 http://archive.ubuntu.com/ubuntu xenial-backports/universe armhf Packages
Err:7 http://archive.ubuntu.com/ubuntu xenial/main armhf Packages
404 Not Found
Ign:9 http://archive.ubuntu.com/ubuntu xenial/restricted armhf Packages
Ign:18 http://archive.ubuntu.com/ubuntu xenial/universe armhf Packages
Ign:20 http://archive.ubuntu.com/ubuntu xenial/multiverse armhf Packages
Err:22 http://archive.ubuntu.com/ubuntu xenial-updates/main armhf Packages
404 Not Found
Ign:24 http://archive.ubuntu.com/ubuntu xenial-updates/restricted armhf Packages
Ign:26 http://archive.ubuntu.com/ubuntu xenial-updates/universe armhf Packages
Ign:28 http://archive.ubuntu.com/ubuntu xenial-updates/multiverse armhf Packages
Err:30 http://archive.ubuntu.com/ubuntu xenial-backports/main armhf Packages
404 Not Found
Ign:32 http://archive.ubuntu.com/ubuntu xenial-backports/universe armhf PackagesIf you peek into the file, /etc/apt/sources.listthen every such error corresponds to some line, for example:
Mistake
Err:22 http://archive.ubuntu.com/ubuntu xenial-updates/main armhf Packages
404 Not FoundLine in /etc/apt/sources.list :
deb http://archive.ubuntu.com/ubuntu/ xenial-updates main restrictedSolution :
Split into two:
deb [arch=amd64] http://archive.ubuntu.com/ubuntu/ xenial-updates main restricted
deb [arch=armhf] http://ports.ubuntu.com/ubuntu-ports/ xenial-updates main restrictedThus, it is necessary to replace several sources of packages. In our docker, we will replace them all with one command:
RUN sed -i -E 's|^deb ([^ ]+) (.*)$|deb [arch=amd64] \1 \2\ndeb [arch=armhf] http://ports.ubuntu.com/ubuntu-ports/ \2|' /etc/apt/sources.listNow I apt-get updatehave to work without errors.
We put the necessary packages
We need to put the host packages such as git, python-pip, cmakeand pkg-config, as well as crossbuild-essential-armhfthat there is a set of gcc / g ++ cross compilers ( arm-linux-gnueabihf-gccand arm-linux-gnueabihf-g++) and system libraries respective architecture:
RUN apt-get install -y git python-pip cmake pkg-config crossbuild-essential-armhfFrom the unusual - we also download GTK (used for drawing windows in the highgui module), GStreamer and Python, but with an explicit indication of the foreign architecture:
RUN apt-get install -y --no-install-recommends \
libgtk2.0-dev:armhf \
libpython-dev:armhf \
libgstreamer1.0-dev:armhf \
libgstreamer-plugins-base1.0-dev:armhf \
libgstreamer-plugins-good1.0-dev:armhf \
libgstreamer-plugins-bad1.0-dev:armhfA further - we clone and collect, indicating the necessary flags:
RUN git clone https://github.com/opencv/opencv --depth 1
RUN mkdir opencv/build && cd opencv/build && \
export PKG_CONFIG_PATH=/usr/lib/arm-linux-gnueabihf/pkgconfig && \
cmake -DCMAKE_BUILD_TYPE=Release \
-DOPENCV_CONFIG_INSTALL_PATH="cmake" \
-DCMAKE_TOOLCHAIN_FILE="../opencv/platforms/linux/arm-gnueabi.toolchain.cmake" \
-DWITH_IPP=OFF \
-DBUILD_TESTS=OFF \
-DBUILD_PERF_TESTS=OFF \
-DOPENCV_ENABLE_PKG_CONFIG=ON \
-DPYTHON2_INCLUDE_PATH="/usr/include/python2.7" \
-DPYTHON2_NUMPY_INCLUDE_DIRS="/usr/local/lib/python2.7/dist-packages/numpy/core/include" \
-DENABLE_NEON=ON \
-DCPU_BASELINE="NEON" ..Where
CMAKE_TOOLCHAIN_FILE- the path to the cmake file that defines the cross-compilation process (sets the required compiler, limits the use of host libraries.WITH_IPP=OFF, - disable heavy dependencies.BUILD_TESTS=OFF,BUILD_PERF_TESTS=OFF, Disable assembly tests.OPENCV_ENABLE_PKG_CONFIG=ON- so that pkg-config can find dependencies such as GTK.PKG_CONFIG_PATH- the right waypkg-configto search for libraries.PYTHON2_INCLUDE_PATH,PYTHON2_NUMPY_INCLUDE_DIRS- paths required for cross-compiling wrappers for python2.ENABLE_NEON=ON,CPU_BASELINE="NEON"- we allow NEON optimization.OPENCV_CONFIG_INSTALL_PATH- adjusts the location of files in theinstalldirectory.
The main thing to pay attention to after the execution cmakeis that all the necessary modules are built (python2, for example):
-- OpenCV modules:
-- To be built: calib3d core dnn features2d flann gapi highgui imgcodecs imgproc java_bindings_generator ml objdetect photo python2 python_bindings_generator stitching ts video videoio
-- Disabled: world
-- Disabled by dependency: -
-- Unavailable: java js python3
-- Applications: tests perf_tests apps
-- Documentation: NO
-- Non-free algorithms: NOand the necessary dependencies, such as GTK, were found:
-- GUI:
-- GTK+: YES (ver 2.24.30)
-- GThread : YES (ver 2.48.2)
-- GtkGlExt: NO
--
-- Video I/O:
-- GStreamer:
-- base: YES (ver 1.8.3)
-- video: YES (ver 1.8.3)
-- app: YES (ver 1.8.3)
-- riff: YES (ver 1.8.3)
-- pbutils: YES (ver 1.8.3)
-- v4l/v4l2: linux/videodev2.hWe can only call make, make installand wait until the end of the assembly:
Successfully built 4dae6b1a7d32Use this idimage to tag and create a container:
docker tag 4dae6b1a7d32 ubuntu16_armhf_opencv:latest
docker run ubuntu16_armhf_opencvAnd it remains for us to pump the collected OpenCV from the container. First we look at the identifier of the created container:
$ docker container ls --all
CONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMES
e94667fe60d2 ubuntu16_armhf_opencv "/bin/bash" 6 seconds ago Exited (0) 5 seconds ago clever_yalowAnd copy the install directory with the OpenCV installed:
docker cp e94667fe60d2:/opencv/build/install/ ./
mv install ocv_installWe're setting the table
Copy ocv_installto Raspberry Pi, install paths and try to run OpenCV from python.
export LD_LIBRARY_PATH=/path/to/ocv_install/lib/:$LD_LIBRARY_PATH
export PYTHONPATH=/path/to/ocv_install/python/:$PYTHONPATHLet's run the detection example using the MobileNet-SSD neural network from https://github.com/chuanqi305/MobileNet-SSD :
import cv2 as cv
print cv.__file__
classes = ['backgroud', 'aeroplane', 'bicycle', 'bird', 'boat', 'bottle', 'bus', 'car', 'cat',
'chair', 'cow', 'diningtable', 'dog', 'horse', 'motorbike', 'person',
'pottedplant', 'sheep', 'sofa', 'train', 'tvmonitor']
cap = cv.VideoCapture(0)
net = cv.dnn.readNet('MobileNetSSD_deploy.caffemodel', 'MobileNetSSD_deploy.prototxt')
cv.namedWindow('Object detection', cv.WINDOW_NORMAL)
while cv.waitKey(1) != 27:
hasFrame, frame = cap.read()
ifnot hasFrame:
break
frame_height, frame_width = frame.shape[0], frame.shape[1]
blob = cv.dnn.blobFromImage(frame, scalefactor=0.007843, size=(300, 300),
mean=(127.5, 127.5, 127.5))
net.setInput(blob)
out = net.forward()
for detection in out.reshape(-1, 7):
classId = int(detection[1])
confidence = float(detection[2])
xmin = int(detection[3] * frame_width)
ymin = int(detection[4] * frame_height)
xmax = int(detection[5] * frame_width)
ymax = int(detection[6] * frame_height)
if confidence > 0.5:
cv.rectangle(frame, (xmin, ymin), (xmax, ymax), color=(255, 0, 255), thickness=3)
label = '%s: %.2f' % (classes[classId], confidence)
labelSize, baseLine = cv.getTextSize(label, cv.FONT_HERSHEY_SIMPLEX, 0.5, 1)
ymin = max(ymin, labelSize[1])
cv.rectangle(frame, (xmin, ymin - labelSize[1]), (xmin + labelSize[0], ymin + baseLine), (255, 0, 255), cv.FILLED)
cv.putText(frame, label, (xmin, ymin), cv.FONT_HERSHEY_SIMPLEX, 0.5, (0, 0, 0))
cv.imshow('Object detection', frame)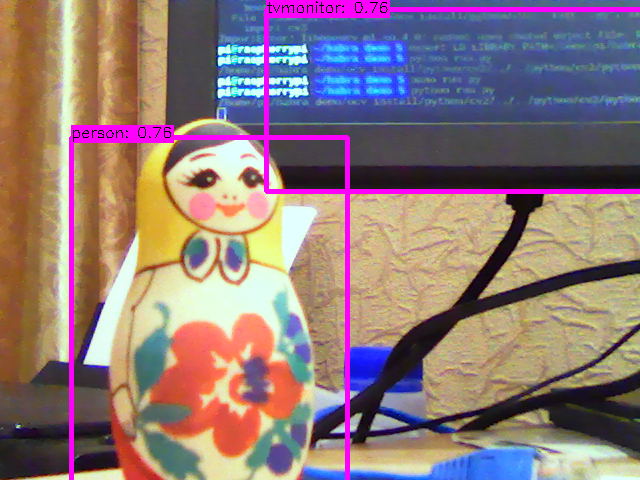
That's all, the complete assembly takes no more than 20 minutes. I attach the final version Dockerfilebelow and take this opportunity to offer a short survey from the OpenCV team for those who once had experience with the library: https://opencv.org/survey-2018.html .
And yes, congratulations on OpenCV 4! This is not just the work of a separate team, it is the work of the entire community - OpenCV 4 you.
FROM ubuntu:16.04
USER root
RUN dpkg --add-architecture armhf
RUN sed -i -E 's|^deb ([^ ]+) (.*)$|deb [arch=amd64] \1 \2\ndeb [arch=armhf] http://ports.ubuntu.com/ubuntu-ports/ \2|' /etc/apt/sources.list
RUN apt-get update && \
apt-get install -y --no-install-recommends \
cmake \
pkg-config \
crossbuild-essential-armhf \
git \
python-pip \
libgtk2.0-dev:armhf \
libpython-dev:armhf \
libgstreamer1.0-dev:armhf \
libgstreamer-plugins-base1.0-dev:armhf \
libgstreamer-plugins-good1.0-dev:armhf \
libgstreamer-plugins-bad1.0-dev:armhf
RUN pip install numpy==1.12.1
RUN git clone https://github.com/opencv/opencv --depth 1
RUN mkdir opencv/build && cd opencv/build && \
export PKG_CONFIG_PATH=/usr/lib/arm-linux-gnueabihf/pkgconfig && \
cmake -DCMAKE_BUILD_TYPE=Release \
-DOPENCV_CONFIG_INSTALL_PATH="cmake" \
-DCMAKE_TOOLCHAIN_FILE="../opencv/platforms/linux/arm-gnueabi.toolchain.cmake" \
-DWITH_IPP=OFF \
-DBUILD_TESTS=OFF \
-DBUILD_PERF_TESTS=OFF \
-DOPENCV_ENABLE_PKG_CONFIG=ON \
-DPYTHON2_INCLUDE_PATH="/usr/include/python2.7" \
-DPYTHON2_NUMPY_INCLUDE_DIRS="/usr/local/lib/python2.7/dist-packages/numpy/core/include" \
-DENABLE_NEON=ON \
-DCPU_BASELINE="NEON" .. && make -j4 && make install