The use of sawn civilian drones for professional geodetic aerial photography of the area

Hello!
I am a surveyor, colleagues from CROC asked me to tell about how we convert drones, how we program flight and how we then process everything, turning the pictures taken from the drone into detailed orthophotomaps, high-precision three-dimensional terrain models and topographic plans of 1: 500–1 scale : 10,000. The
team and I tried several different drones and eventually settled on the DJI Phantom 4 PRO “workhorse” with several modifications. First and foremost, what we did to him was to equip it with a geodetic GNSS receiver, which allows us to determine photographing centers with centimeter accuracy.
Its standard GPS provided accuracy of about 15–20 meters. To solve geodesic tasks with such precision, we need either special crosses on the ground, or some other perversion, such as laying out paper plates at known coordinates.

We make it both simpler and more difficult: we install a ground base station with precisely known coordinates, and we integrate an additional GNSS receiver into the drone and install an external antenna. For example, we started with MATRICE 600 with the DJI system installed on board the D-RTK system, which was very cumbersome, expensive and not convenient for solving geodetic tasks.
Then we remade a more compact DJI PHANTOM 4 PRO: we managed to integrate additional GNSS equipment into a standard case. The total mass of the drone increased by about 100 grams. Flight time suffered a little, but uncritically: a set of four batteries is enough to complete a survey of 200–300 hectares.
Phantom gave one important opportunity - the main set began to fit in the hand luggage of a passenger aircraft. That is, we can now carry the entire set of equipment with us anywhere very, very simply.
The minimum set is a modified drone (its entire set), a geodetic GNSS receiver as a ground base station, a laptop with a flight planning program, a downloaded map (for working without the Internet) and a flight plan set up for a point, if there was such a possibility in advance. We also need additional batteries, a charger (or several) and a generator. We take a gasoline generator, which is made in the form of a case, it is very convenient for our needs. Or inverter to power the car's engine. For some regions it is necessary to take another heating (in particular, for batteries and hands).
With one battery, you can capture 50 hectares with a resolution of 2–5 centimeters per pixel.
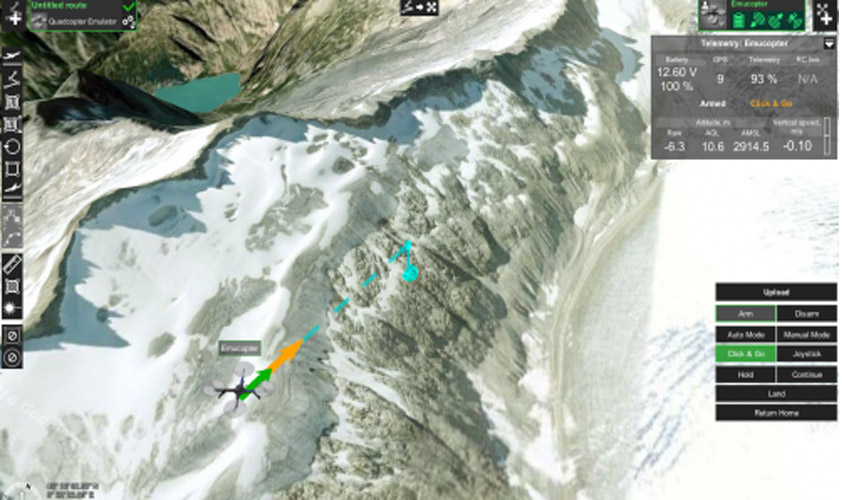
We work this way: we arrive at a place with a task for a drone, which is spelled out in advance in advance (at the office). We use UgCS (this is a professional rather expensive software for flight planning drones, which in Russia sells and advises on integration and refinement of CROC. Of course, such software is applicable not only in geodesy, it can be used by rescuers, agronomists, builders, etc. but in these areas I am not strong, so all questions are for colleagues from CRIC). In it, we indicate the boundaries of the area of work, the transverse overlap, the height of photographing, and then the software itself calculates the flight path of the drone, taking into account the features of the terrain. That is, UgCS cuts everything as it should: with intermediate landings to replace batteries and the rest.
We look, if there are any unrecorded obstacles, then put the GNSS base station. The coordinates of ground points are specified by the receiver Topcon GR-5.

Next is the flight mission. Here are the boundaries of the fly zone and the longitudinal or transverse overlap for gluing. We put a couple of control contrast points for control:

To connect the autopilot from GNSS, we connect the drone with the console, the console with the tablet with the DJI control program, and then the tablet with the laptop. Configuring this bundle with the move is not easy. Here I was greatly helped by my colleagues from CROC: install, adjust, protest before launch.
The next point is that approximately every third object is located where there is no stable Internet access. With this software copes. But there are also difficult areas, for example, mountains, where problems with signal propagation already begin. That is why we use Phantoms: they have a lot of built-in sensors to bypass obstacles. When he loses touch, he comes back. When can not go back, then starts to sit down. And these sensors help fly in difficult conditions, such as highlands or in the city. We had several cases where the obstacle sensors helped to avoid an emergency. For example, in the mountains of the Emirate of Fujairah (UAE), we lost contact with the drone, and the drone could not return to the take-off point due to the wind.
The result of the drone's flight is photos at these points (this software for processing is already highlighted by their centers):
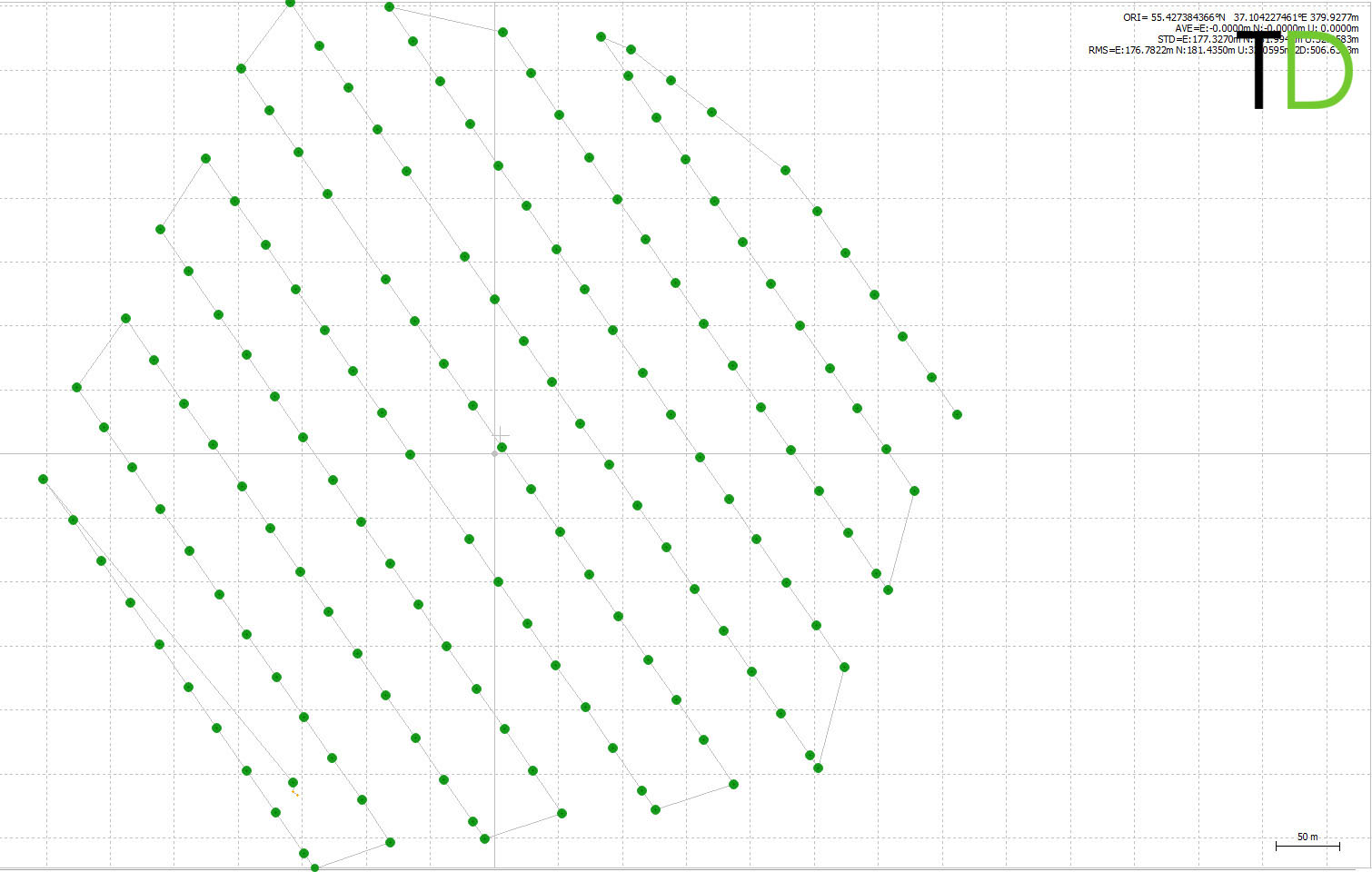
The GNSS measurements are downloaded via Wi-Fi separately after the flight is completed, they are stored on the drone and are not transmitted to the ground in real time.
Then you can leave, because the next step is photogrammetric processing of aerial photography materials. The coordinates of ground control points are used only for control:

Here is a cloud of points after classification. The vegetation, supports, power lines, buildings and structures are highlighted in color:
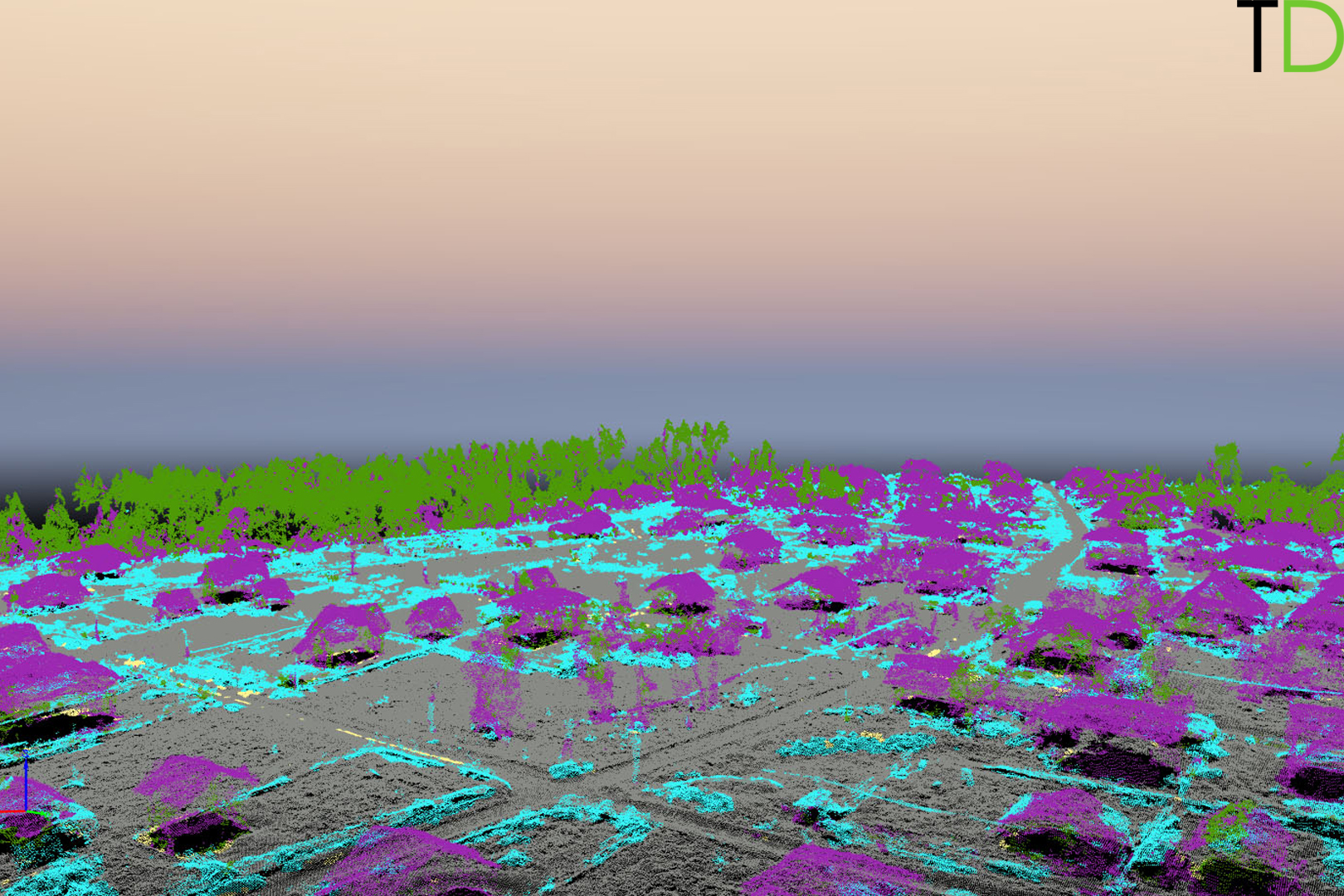
And this is already a 3D model on this cloud:

At this cottage settlement, the task was simple: 5 cm per pixel, a simple landscape, a minimum of trees, no pickup. We obtained an orthophotomap and combined it with the cadastral plan:
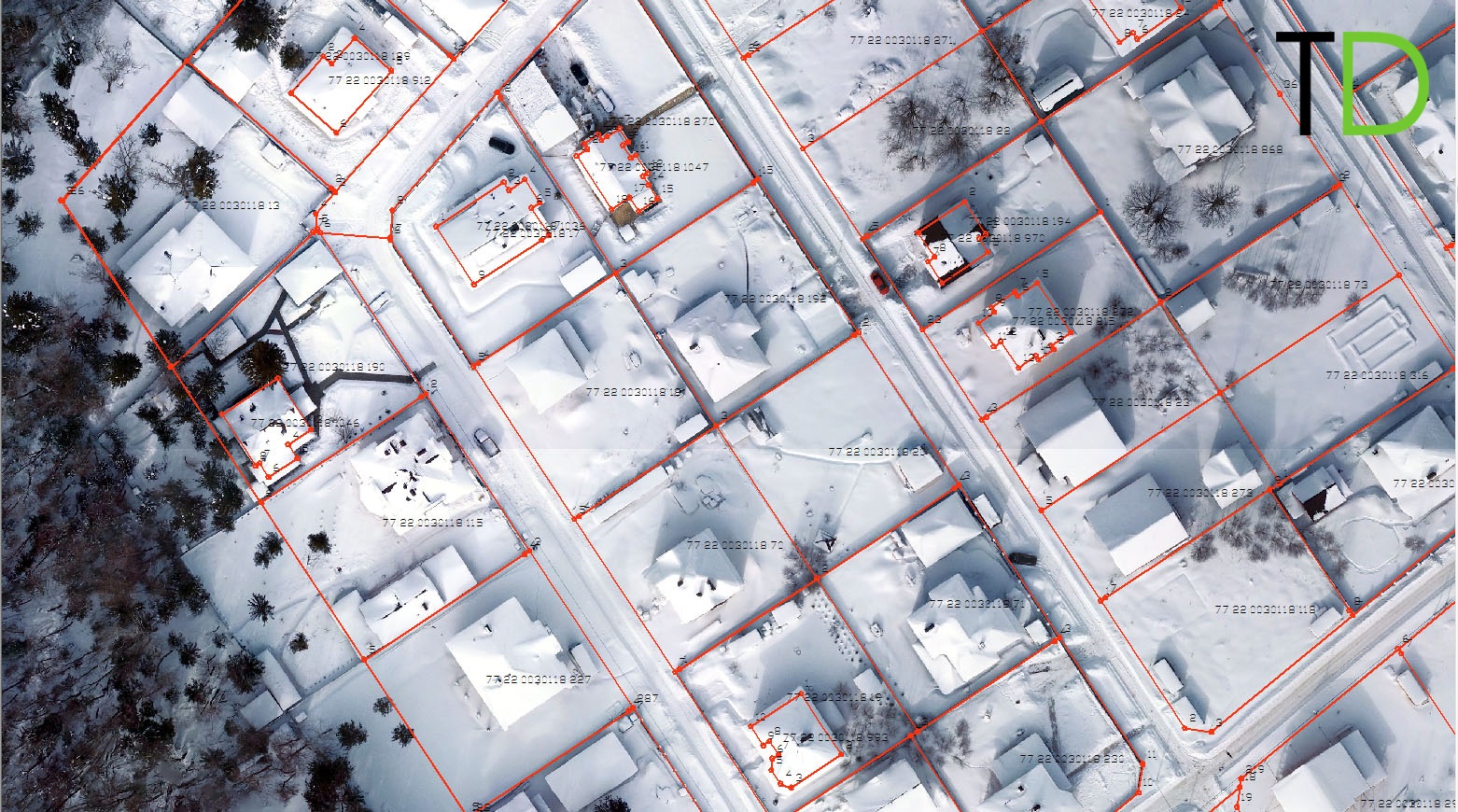
It can be used for land surveying, inventory and cadastral assessment of land, assessing the efficiency of land use, designing the development of territories, design and exploration work, reconstruction and development of road networks, monitoring the state of land and underground utilities, pipelines, power lines, etc. land monitoring for the purpose of protection, environmental monitoring of boundaries and land areas subject to change, creation of three-dimensional terrain models for GIS.
Why UgCS? Because there are no other options on the market, everything else is of an amateur level. It is very convenient that any drone can be put on a mission, and it will simply fly: it supports the entire line of DJIs including Maviki and a dozen more drones popular in geodesy. No binding to the gland at all. Very good planning - from the office. Normal control from a laptop with a joystick or CLICK & GO, good geocoding of images for Photoscan or Pix4D. There is an alternative software on the market without having to carry a laptop, but with far fewer options. A laptop is a huge advantage, but at the same time a curse of the system: it greatly complicates business trips. In winter, all this becomes even more difficult due to the fact that the batteries of the whole bundle are cold, and you have to work with gloves (which is not very accurate). But there are no other options yet:
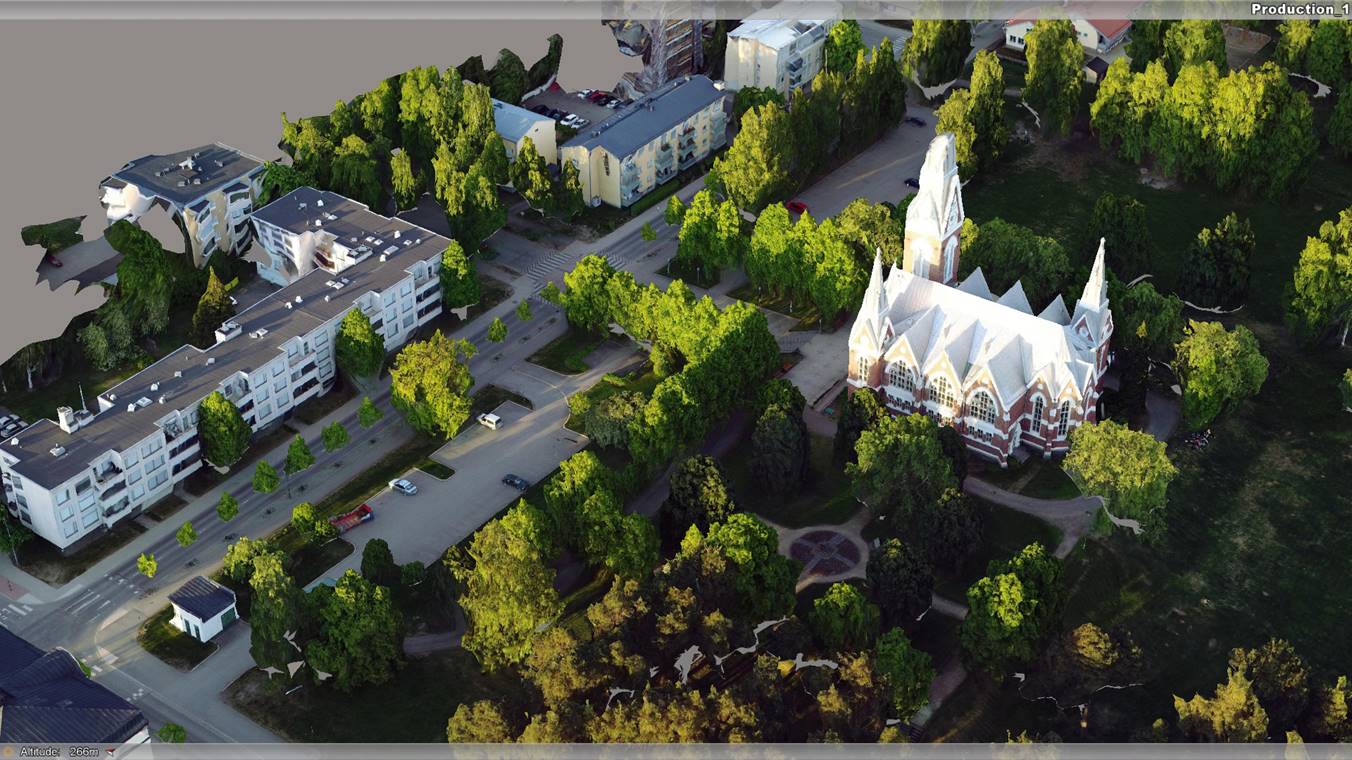
Here is an example of the result of a three-dimensional model of the city:
Here is another object - a three-dimensional model of a career:


This is the story.
Links
- My blog about equipping drones and sorties
- Site UgCS - vendor SPH Engineering. Scheduler difficult and long missions.
- Mail colleagues from CROC - ALevandovskiy@croc.ru (Alexander Lewandowski) - for questions on software.
- Phantom we flew
- What is GNSS RTK