Clean in the boom workshop. Part 1

Or a vacuum cleaner controlled by Bluetooth
In the process of technical creativity, not only all sorts of useful things are obtained, but also many different shavings, sawdust and other debris. And this garbage should be removed both in the process of sawing and after. Below I will tell you about my solution to this problem, and in one, I will show a remote control project for devices with a phase-pulse controller.
For a start, I chose a vacuum cleaner suitable for cleaning chips, including metal. Vacuum cleaners with a bag disappeared immediately. Because paper shavings and other pieces of iron will quickly tear a paper bag, and you will not shake it all out of a fabric bag. The choice fell on a vacuum cleaner with a cyclone filter (container) and a foam filter after it. It's comfortable. You just spill the shavings out of the glass and wash the foam sometimes. With him, I implemented the suction chips on a hand mill right from under the cutter during operation. This greatly improves visibility, reduces scattering chips and improves quality, because chips do not interfere with the process and the cutter does not get stuck in it. The control of the vacuum cleaner was through an outlet with a relay synchronized with the inclusion of the machine. Clickable But then this was not enough. And I made a big cyclone with a 20 liter tank.


Clickable
Here is a cool thing!
- This is the cyclone itself. It creates a whirlwind of air and dust / dirt is thrown by centrifugal force into the tank 2
- The tank must be absolutely tight and have strong walls so that it will not be crushed by depression. It must have a removable cover to shake out the garbage.
- The basis on rollers that was convenient to roll on a workshop to different machines or when cleaning.
The vacuum cleaner serves as a source of suction power for the cyclone. Now any. Because the cyclone catches 99% of the garbage and the vacuum cleaner should be cleaned very rarely. A cyclone does not cope well with fine dust, which has almost no mass (for example, concrete dust), but this is not our case. I am not a builder. But the sawdust after the electric jigsaw is already within his power, and the metal shavings - by itself.
Cyclone itself (1) I bought in a Chinese online store.
barrel of toxic glue
The stand on the rollers somomyril himself.
It seems all great, but there was a problem. If you look closely at the photo,
We need to come up with a radio control!
Fortunately, I still have a handle from an old torn hose. By the way, this is also an idea for hose repair with control. Hose can be put any, and management to make by radio. The main thing is to keep a pen with a button.
I also have an idea to integrate radio modules into machines where I apply chip suction (CNC milling cutter and conventional) and integrate the suction control into the machine panel. And in the case of CNC, it will be possible to set the suction programmatically from the G code. And do not poke at the outlet with the relay.
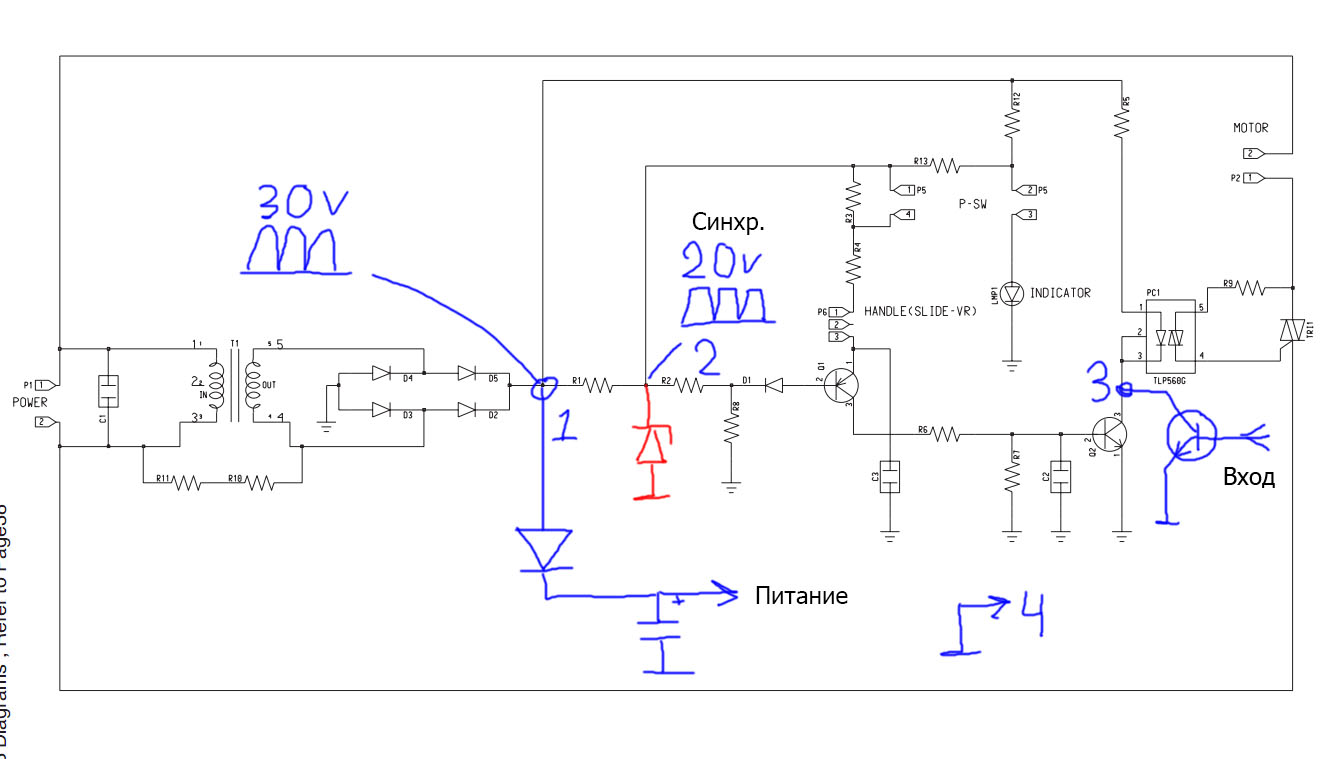
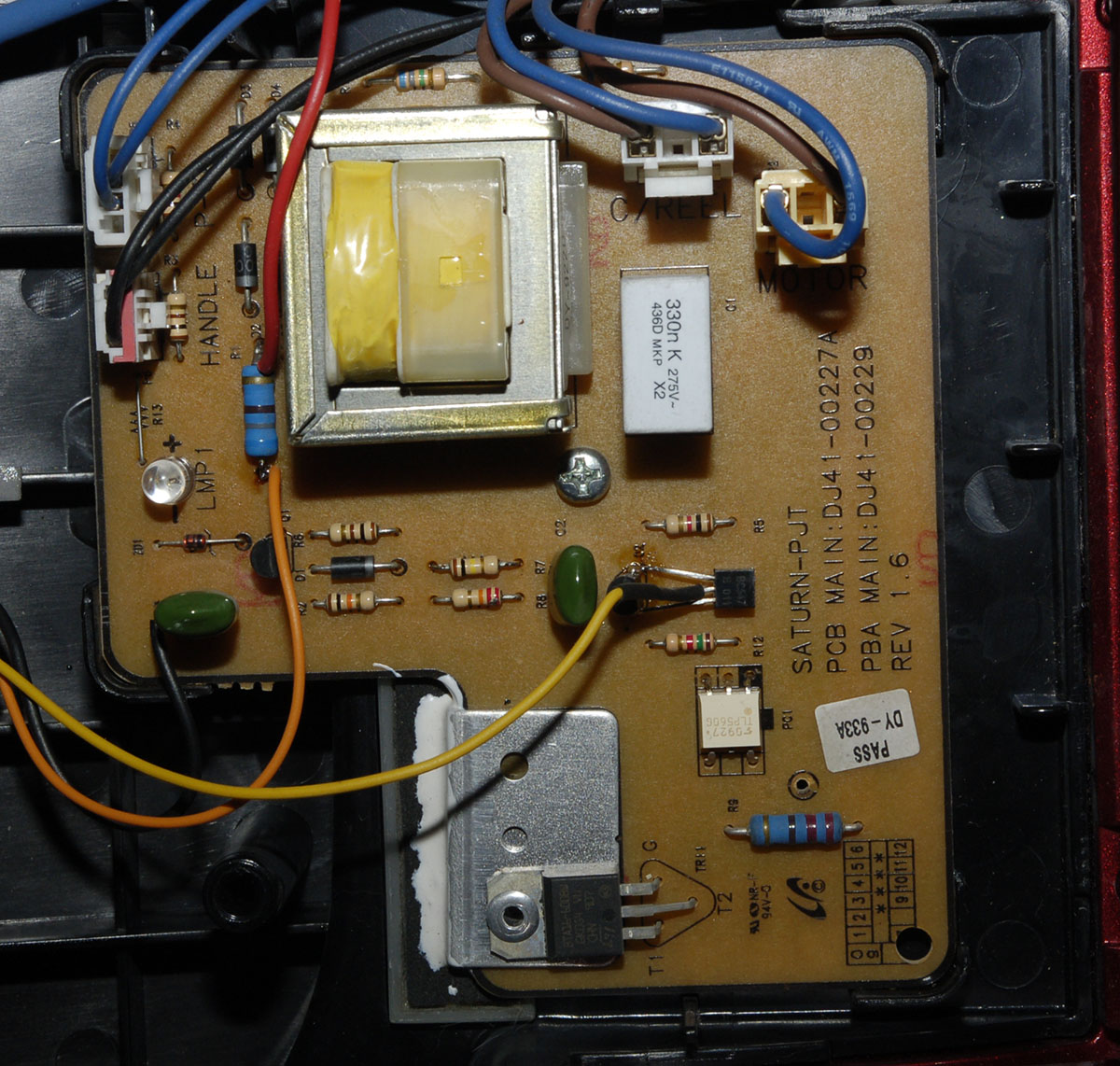
No sooner said than done. Consider the scheme of my Samsung vacuum cleaner:
Clickable
What do we see here?
The manufacturer did not apply for a 220 volt handle, so that the user would not be killed by the current, and made a transformer and a galvanic isolator. It's nice when they take care of you. And from the low-voltage part, you can take power for the "brains". A motor is controlled through a triac and he opens the optocoupler. The red stabilitron circuit designers simply forgot :)
I would like to skip the scheme so as not to destroy the native functionality. Let the vacuum cleaner be able to work like a regular household.
Draw conclusions:
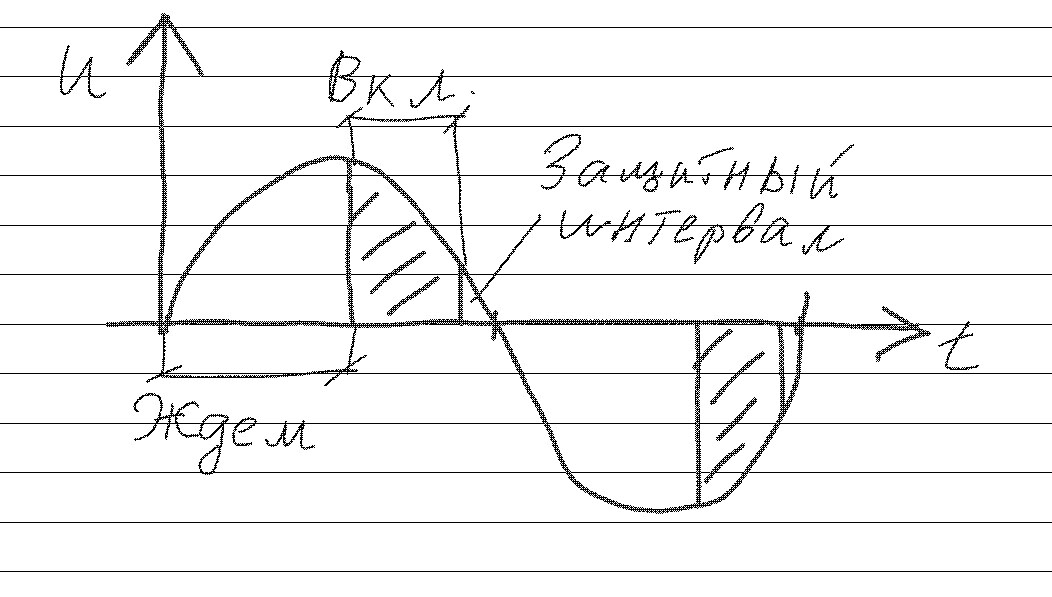
- You have to do PWM control and synchronize it with the network. Just changing the voltage or something like that will not work.
- Since the control of the triac, we will have to wake up starting from the end of the half-cycle of the mains voltage so that the triac closes when going through 0 and opens when we need it.
- We need a protective interval in order to have time to remove the illumination of the optocouplers before the transition through 0, again so that the triac closes and does not open at the beginning of the next half period.
- It is necessary that the motor is guaranteed to start and the brushes are not burnt. You can not start the PWM with zero duty cycle. Because the motor must overcome friction and is guaranteed to startonut. Need a minimum duty cycle and it should be measured.
- To power the "brain" will have to use a pulse down converter. Power "brains" 3.3V and 30V at the output of the transformer. To dissipate so much into heat is not humane, especially since the trance is small and will be heated.
I decided to “crash” into the circuit in the following way:
From point 1 we take food. But through the diode! Because pulsed voltage is necessary for the operation of the native circuit.
From point 2 we will remove the synchronization pulse with the network.
At point 3, we also connect a transistor, which we will use to open the optocoupler with a signal from the controller.
Well, the earth 4 also does not hurt us. With the help of an oscilloscope on a working board, I measured that the minimum duty cycle for a confident start of the motor should be 20%. And I decided to make a guard interval before going through 0, to make 5% of the network half-period, that is, 0.5 miles. It will be necessary to program the controller to do something like this: For the implementation of the radio connection, I ordered such penny SPP Bluetooth modules in China:
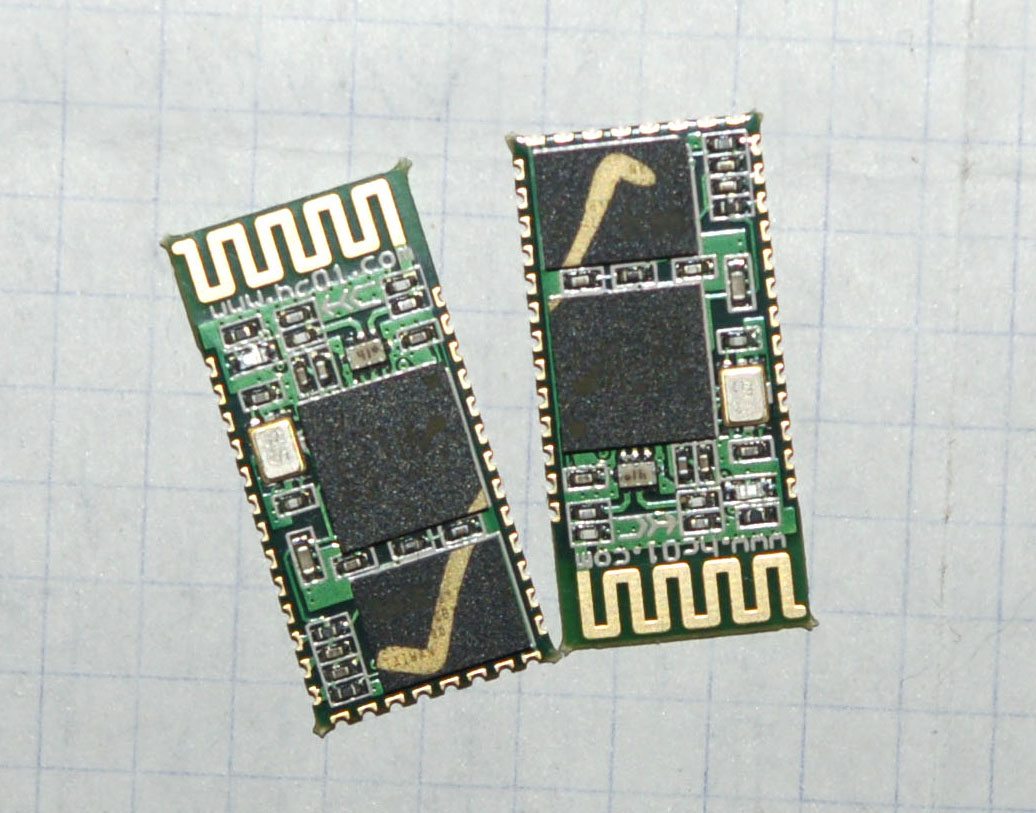
Their name is HC-05
They can be configured as a receiver and transmitter. They are configured by UART AT commands. The process is much where described. I think you should not dwell on it and there is a datasheet on these modules on the network.
I did not set the receiver with a standard PIN to protect against third-party connections, but the transmitter locked the receiver to a fixed address so that it did not connect with anything. In general, he protected the device from vicious connections :)
The speed chose 9600 is more than enough. It would be enough for this brain Megi8. Turned on the modules, checked. They connect themselves without additional commands and the terminal checked that the letters from one module to another arrive. Marked, who of them who postponed until the rest of the giblets are ready.
Everything, I'm tired of writing and nobody will read long articles.
It's Friday! And it's time to start celebrating it, and I wish it to everyone!
In the next part, I will show the hardcore implementation of the receiver and transmitter, and tell you how I saw the boards on the router.