A cat-sized robot cheetah created in Switzerland
The robot the size of a small cat from the bionics laboratory of the Federal Polytechnic School of Lausanne ( EPFL ), although inferior to the full-size “cheetahs” Boston Dynamics and MIT in size and absolute speed, is able to run independently and overcome small obstacles. And in relation to speed to its own dimensions, it is the fastest four-legged robot in the world in the weight category up to 30 kg. With a length of only 20 cm and a weight of 1100 grams, cheetahs , as its creators call the robot, can run at a speed of almost one and a half meters per second.
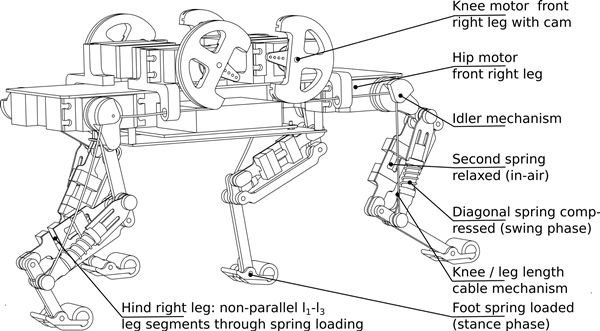
The robot is driven by eight servomotors - two for each leg. The femoral joints are attached directly to the engines, and the knee joints are connected through a cable system. On the legs of the robot there are springs that are selected so that they work like the muscles and tendons of a real animal. Thanks to the successful design of the legs, the robot is able to run over slightly rough terrain - it keeps balance only due to mechanical self-stabilization, working in open-loop mode.
Unlike large four-legged robots from Massachusetts, the cheetah contains virtually no unique complex parts (the MIT cheetah uses specially designed electric motors, but about the design of the cheetah Boston Dynamics there are practically no data in the public domain). According to its designers, the robot is quite cheap, affordable and safe, which makes it an ideal candidate for research in the field of robotics by poor institutions and even single enthusiasts.
A scientific paper with detailed information about the robot should be published today in The International Journal of Robotics Research .
The robot is driven by eight servomotors - two for each leg. The femoral joints are attached directly to the engines, and the knee joints are connected through a cable system. On the legs of the robot there are springs that are selected so that they work like the muscles and tendons of a real animal. Thanks to the successful design of the legs, the robot is able to run over slightly rough terrain - it keeps balance only due to mechanical self-stabilization, working in open-loop mode.
Unlike large four-legged robots from Massachusetts, the cheetah contains virtually no unique complex parts (the MIT cheetah uses specially designed electric motors, but about the design of the cheetah Boston Dynamics there are practically no data in the public domain). According to its designers, the robot is quite cheap, affordable and safe, which makes it an ideal candidate for research in the field of robotics by poor institutions and even single enthusiasts.
A scientific paper with detailed information about the robot should be published today in The International Journal of Robotics Research .