Build a multicopter, the final part
Part 1 | Part 2 | Part 3 | Part 4 The
Napoleonic plans described in the previous parts turned out to be practically impracticable with my far not even hands and meager forces of two or three people. Therefore, inspired by one of the sensible thoughts of the book ReWork , I decided to still assemble a flying machine. As fast as possible and with a minimum of effort this time.
But it was not there.
Of the huge number of ready-made projects, I liked German the most, especially considering that Andrei, the founder and inspirer of the site of a large Russian-speaking community of multicopter fans , stopped at it . What other details will be required, I approximately described in the previous parts. Let's put everything together, adding specifics:
1. Prices are approximate, depending on where and how many parts to take.
2. Depending on how many motors are expected in the device, plus one or two spare ones.
3. Differ in power and extra buns. If I understand correctly, we do not need additional V2.0 controllers buns, and V1.2 power can be increased by replacing the firmware and mosfets.
4. You will need to buy or solder a PPM converter to it . There is another transmitter, but it is not available.
* - optional item.
Total: $ 1,415 - $ 1,905.
If you still have money, you can buy navigation modules: a magnetic sensor , navigation board and GPS($ 90 + $ 170 + $ 112). In fact, the upper price ceiling is practically unlimited. You can order a heavy-duty carbon-fiber housing, three-kilogram motors for 20 horsepower and rivet a multicopter that can lift a hundred kg into the air ... But something I noticed.
So, suppose the details arrived safely to us (oh, not at one time it was! It’s good even without customs clearance). Let's proceed to the assembly. Further material will closely echo Andrei’s website, which has a huge pile of articles on individual parts and assemblies in particular, so you can look there to broaden your horizons.
Something I didn’t like the classic central plate of a round shape and square profiles, so I stocked up with aluminum plates (thickness 1.5-2.5 mm, price $ 5 per 900 cm², yes, a little dirty), aluminum pipes (outer diameter 10 mm, wall thickness 1 mm, price $ 4 per 2 m), paper and fantasy.
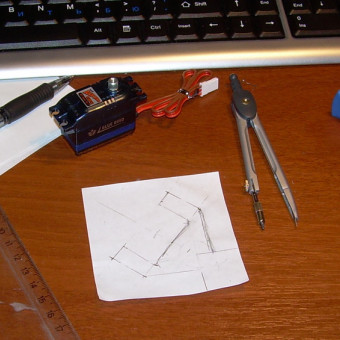
We measure the adapter board for the motor controllers and the mount of the motors and draw for some reason in the Compass: Despite the fact that the mount of the motors to the supporting pipes is quite simple, I had to sweat a lot, sawing from the aluminum plate of the site:

It is also difficult to drill holes in pipes strictly perpendicular to the pipe. To do this, you need somewhere to get a special device that I did not find, so it turned out crookedly. From this point of view, it would be more correct to use aluminum profiles of a square section, although it is rumored that a round pipe dampens vibration better.
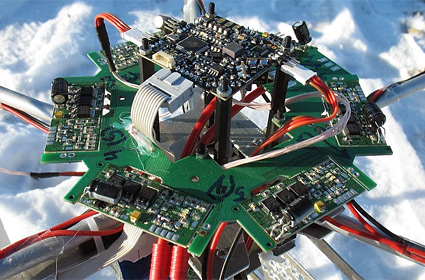
The central plate of my authorship, pipes are fastened between two such plates and micropore gaskets: A piece of the frame assembly. Weight with motors 700 g, vibration damping is wonderful, so far not bad.


A very important lesson that I learned from the weeks of cutting and kilograms of chips: “on the knee” such things are not done, you need to look for professional equipment. Well, or I just have arms out of my ass. In parallel with this thought, information came to me that for a long time there were offices that laser cut everything that you can draw from metal, and it is relatively inexpensive (~ $ 4.3 per meter of cut in our latitudes). Inspired, I figured out a “pattern” of the camera's suspension to cut along with other details: Drawing in AutoCad was just fabulously convenient and exciting, I don’t think there is engineering CAD better than this. However, I was disappointed: in the office, the laser stopped taking duralumin thicker than 1.5 mm. And according to the sensations from feeling this duralumin, one and a half millimeters was clearly not enough. I had to again myself, and again with pens:


When designing your version of the frame, you need to immediately provide for the attachment points of all the components, otherwise then it will come out sideways, you have to sculpt the parts anywhere.
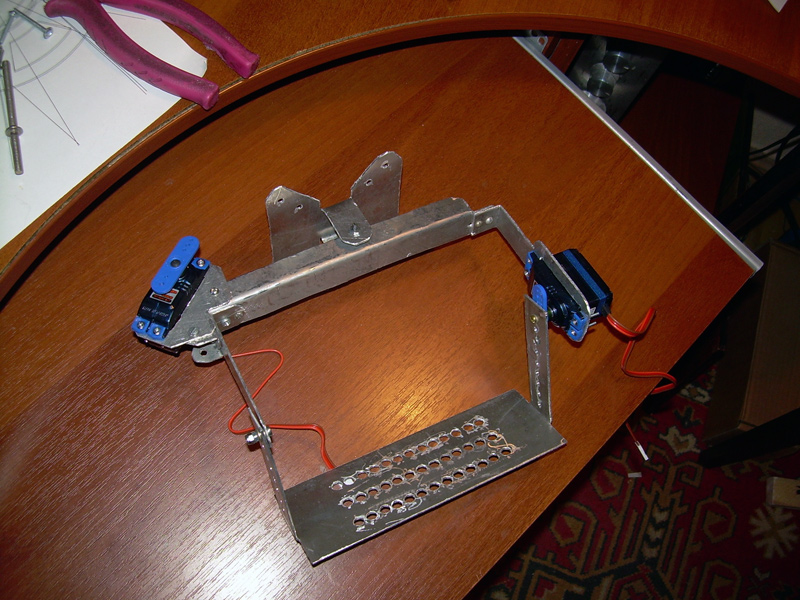
More about the suspension of the camera. I was not able to make a normal suspension, I got a monstrous design with a rather big play. The servos do not have enough power to move this suspension, so even when not loaded, it leans in jerks. Must do with gearbox. And in general, in my opinion, this is the most difficult part of the device, it must be carefully designed and manufactured on professional equipment.
More about the frames can be read on the website of Andrew and the forum there. It should be noted that this forum has a lot of great ideas, you just need to look for them.
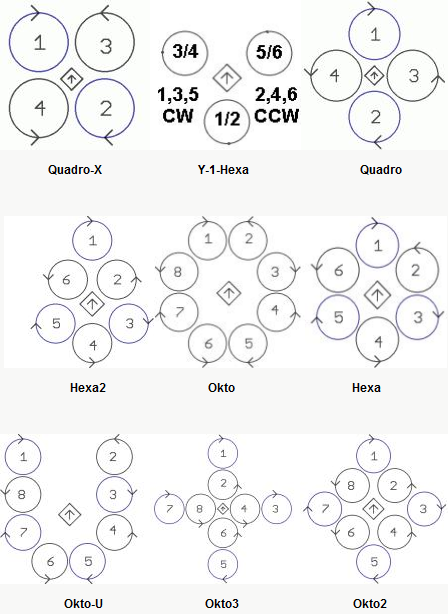
All the information is described in detail here , I’ll just add that it was quite convenient to buy wires of two colors, and solder the combinations h-h-h-h-h in turn, and then solder one color to the white and black wires of the motor, and to red - another. In this case, the motors spin in opposite directions, through one. However, do not rush to heat the shrink tube until you check whether the motors are spinning in the right direction. In order for the motor to spin in the other direction, it is enough to swap any two wires.
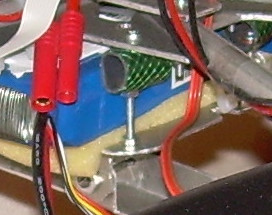
First, solder the six controllers to the distribution board (however, this is not necessary, you can place the controllers closer to the motors, but then you need to provide mounts for them), to the corresponding contact pads of the 12AWG wire (with the battery connector, observing the polarity), and to the outputs of the controllers 16AWG wires. Address areas are left untouched for now.

 To the main board, you need to solder the connectors for servos (3,4,8) and communication with the computer (1), power wires (already from the distribution board, 14 and 16), the i2c bus (9) leading to the distribution board and receiver (13 , or 11). Full details here and here . And yet, about the receiver . Together with the main board, I immediately bought radio modems, it is very convenient. They need to be soldered and adjusted exactly according to this or this manual.
To the main board, you need to solder the connectors for servos (3,4,8) and communication with the computer (1), power wires (already from the distribution board, 14 and 16), the i2c bus (9) leading to the distribution board and receiver (13 , or 11). Full details here and here . And yet, about the receiver . Together with the main board, I immediately bought radio modems, it is very convenient. They need to be soldered and adjusted exactly according to this or this manual.
The quadcopter, in fact, is almost ready. It remains to put together the frame, the distribution board, the main board, attach the radio modem, battery and receiver. The settings are remarkably described on Andrey ’s website here and here , so I don’t see the need to rewrite this manual again. Legs had to be made from absolutely anything horrible, but this is not critical. As a result, a design that was not particularly credible came out, but it showed itself well in tests.



After months of (un) fruitful work and soldering of incorrectly soldered wires, the hour "Ch" came. A relatively calm, frosty morning is a wonderful day to ditch almost two thousand dollars.




It’s very difficult to control a flying machine from a habit. Especially when it is crookedly assembled, and in the autopilot the corresponding coefficients are not configured. The tests had to be carried out with an attached multicopter, well, or at least turn on altitude control, which I forgot to do. As a result, the device soared into the sky, and from there it was carried by a passer who was starting to test for a test. By this time, I completely did not understand in which direction the onboard board was looking, and the device could not be gently planted. However, I was lucky again, and the damage turned out to be small: one carrier pipe was broken, the legs of the multicopter, and almost all the propellers were beaten off.


Now we have to redo the frame a bit, providing a protective frame, legs and so on, and after that a couple more tests, this time more careful. In addition, the issue of camera suspension remains open.
I apologize for the somewhat messy and crumpled style of presentation, in the end it turned out that most of the information is described in some detail in other sites, and my own “achievements” are more likely to correct my own mistakes, and they do not deserve attention.
Thank you for flying with our airlines.
Napoleonic plans described in the previous parts turned out to be practically impracticable with my far not even hands and meager forces of two or three people. Therefore, inspired by one of the sensible thoughts of the book ReWork , I decided to still assemble a flying machine. As fast as possible and with a minimum of effort this time.
But it was not there.
Details
Of the huge number of ready-made projects, I liked German the most, especially considering that Andrei, the founder and inspirer of the site of a large Russian-speaking community of multicopter fans , stopped at it . What other details will be required, I approximately described in the previous parts. Let's put everything together, adding specifics:
| Components | where to get | how much | how much 1 | for all |
|---|---|---|---|---|
| Motors | 700kV or 860kV | 7-8 2 | 12 $ -16 $ | 85 $ -130 $ |
| Motor controllers | V1.2 or V2.0 3 | 6 | 56 $ -76 $ | 336 $ -456 $ |
| Propellers | 10x4.5 or 12x4.5 | > 16 | $ 2.7-$ 3.7 | $ 40.5-$ 55.5 |
| Batteries | 5000mAh 3S1P | 2-4 | $ 28 | 56 $ -112 $ |
| Charger | IMAX B6 | 1 | $ 28 | $ 28 |
| Remote and Receiver | simple 4 or abruptly | 1 | 66 $ -190 $ | 66 $ -190 $ |
| Connectors | gold plated | a dozen | 4 $ -6 $ | 4 $ -6 $ |
| Wires | 12AWG and 16AWG | 2 m + 7m | $ 2.5; 1,4 $ | 15 $ |
| Main board | Flight-Ctrl V2.1 | 1 | 485 $ | 485 $ |
| USB adapter | MK USB | 1 | $ 25.5 | $ 25.5 |
| Frame materials | in shops, in markets | - | 20 $ -50 $ | 20 $ -50 $ |
| Servos | good and even better | 2-3 | 23 $ -47 $ | 46 $ -140 $ |
| Controller board | Hexa power distribution board * | 1 | 35 $ | 35 $ |
| Radio modems | Wi232 + Adapter board * | 2 | 67 $ | 134 $ |
| Videolink | 900MHZ 100mW + camera * | 1 | 47 $ | 47 $ |
2. Depending on how many motors are expected in the device, plus one or two spare ones.
3. Differ in power and extra buns. If I understand correctly, we do not need additional V2.0 controllers buns, and V1.2 power can be increased by replacing the firmware and mosfets.
4. You will need to buy or solder a PPM converter to it . There is another transmitter, but it is not available.
* - optional item.
Total: $ 1,415 - $ 1,905.
If you still have money, you can buy navigation modules: a magnetic sensor , navigation board and GPS($ 90 + $ 170 + $ 112). In fact, the upper price ceiling is practically unlimited. You can order a heavy-duty carbon-fiber housing, three-kilogram motors for 20 horsepower and rivet a multicopter that can lift a hundred kg into the air ... But something I noticed.
So, suppose the details arrived safely to us (oh, not at one time it was! It’s good even without customs clearance). Let's proceed to the assembly. Further material will closely echo Andrei’s website, which has a huge pile of articles on individual parts and assemblies in particular, so you can look there to broaden your horizons.
Camera frame and suspension
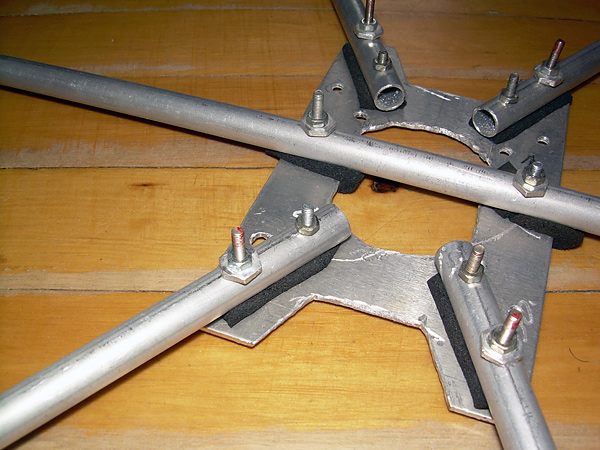
Something I didn’t like the classic central plate of a round shape and square profiles, so I stocked up with aluminum plates (thickness 1.5-2.5 mm, price $ 5 per 900 cm², yes, a little dirty), aluminum pipes (outer diameter 10 mm, wall thickness 1 mm, price $ 4 per 2 m), paper and fantasy.
We measure the adapter board for the motor controllers and the mount of the motors and draw for some reason in the Compass: Despite the fact that the mount of the motors to the supporting pipes is quite simple, I had to sweat a lot, sawing from the aluminum plate of the site:


It is also difficult to drill holes in pipes strictly perpendicular to the pipe. To do this, you need somewhere to get a special device that I did not find, so it turned out crookedly. From this point of view, it would be more correct to use aluminum profiles of a square section, although it is rumored that a round pipe dampens vibration better.
The central plate of my authorship, pipes are fastened between two such plates and micropore gaskets: A piece of the frame assembly. Weight with motors 700 g, vibration damping is wonderful, so far not bad.

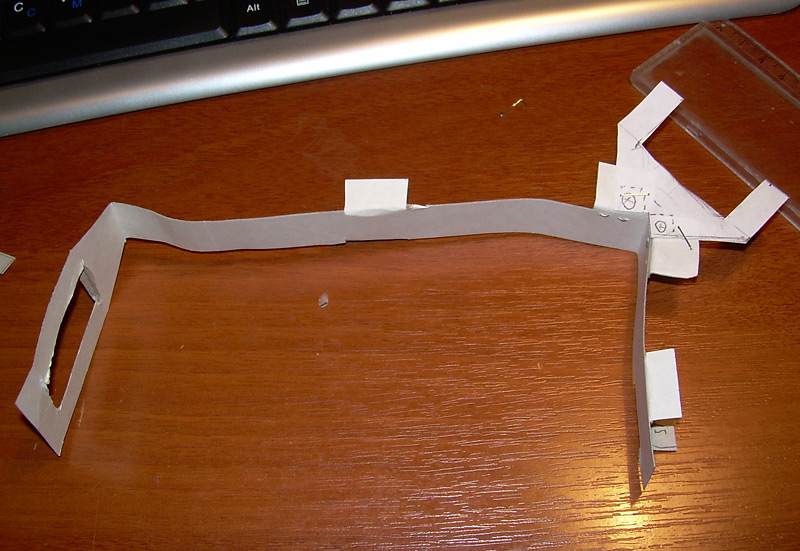
A very important lesson that I learned from the weeks of cutting and kilograms of chips: “on the knee” such things are not done, you need to look for professional equipment. Well, or I just have arms out of my ass. In parallel with this thought, information came to me that for a long time there were offices that laser cut everything that you can draw from metal, and it is relatively inexpensive (~ $ 4.3 per meter of cut in our latitudes). Inspired, I figured out a “pattern” of the camera's suspension to cut along with other details: Drawing in AutoCad was just fabulously convenient and exciting, I don’t think there is engineering CAD better than this. However, I was disappointed: in the office, the laser stopped taking duralumin thicker than 1.5 mm. And according to the sensations from feeling this duralumin, one and a half millimeters was clearly not enough. I had to again myself, and again with pens:
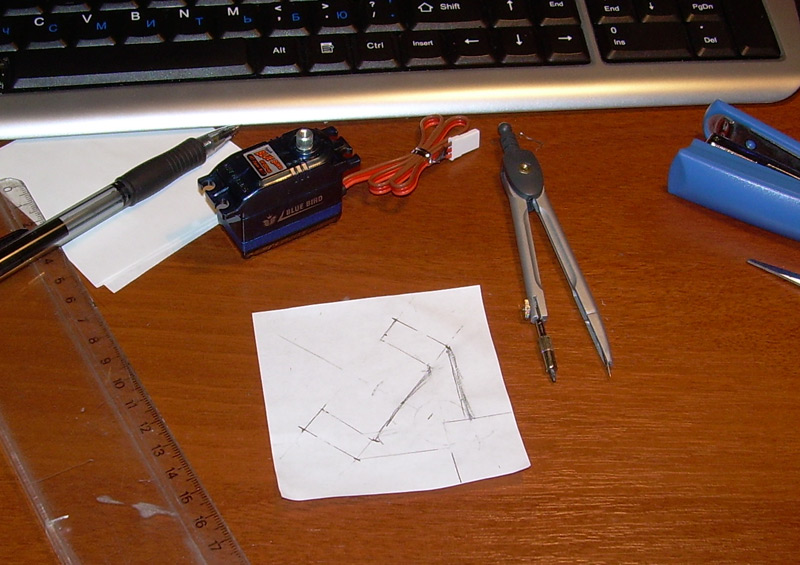

When designing your version of the frame, you need to immediately provide for the attachment points of all the components, otherwise then it will come out sideways, you have to sculpt the parts anywhere.
- Fastening of supporting pipes . You can leave one pipe intact (as in my photos above), fasten the rest to the plates in two places with bolts, at a distance of 2 cm from one another
- Mounting the main board . As it turned out, it can’t be put on anyhow, but only in a few ways
- Mounting the camera mount . Remarkable vibration protection hanging the camera mount plate on sections of a thick garden hose .
- Battery mount . I was lucky, the battery was able to attach to the camera suspension. In the comments to previous articles, they suggested making steadycam as a suspension, which has a battery instead of a load.
- Mount the modem and receiver . I forgot about them, so I had to tape with tape directly to the supporting pipes. Not very aesthetically pleasing, but quite reliable, since these boards weigh almost nothing.
- Mount "legs" . It was also necessary to remember about him, because fastening the legs again to the supporting pipes is a bad idea.
{kind=link}
{kind=link}
More about the suspension of the camera. I was not able to make a normal suspension, I got a monstrous design with a rather big play. The servos do not have enough power to move this suspension, so even when not loaded, it leans in jerks. Must do with gearbox. And in general, in my opinion, this is the most difficult part of the device, it must be carefully designed and manufactured on professional equipment.
More about the frames can be read on the website of Andrew and the forum there. It should be noted that this forum has a lot of great ideas, you just need to look for them.
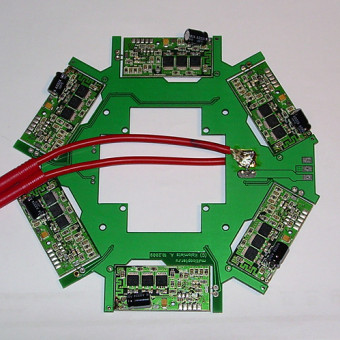
Motor controllers
All the information is described in detail here , I’ll just add that it was quite convenient to buy wires of two colors, and solder the combinations h-h-h-h-h in turn, and then solder one color to the white and black wires of the motor, and to red - another. In this case, the motors spin in opposite directions, through one. However, do not rush to heat the shrink tube until you check whether the motors are spinning in the right direction. In order for the motor to spin in the other direction, it is enough to swap any two wires.
First, solder the six controllers to the distribution board (however, this is not necessary, you can place the controllers closer to the motors, but then you need to provide mounts for them), to the corresponding contact pads of the 12AWG wire (with the battery connector, observing the polarity), and to the outputs of the controllers 16AWG wires. Address areas are left untouched for now.


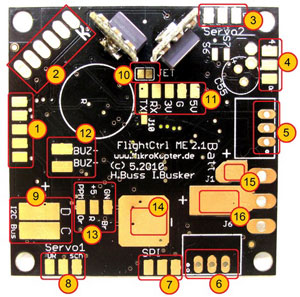
Main board
To the main board, you need to solder the connectors for servos (3,4,8) and communication with the computer (1), power wires (already from the distribution board, 14 and 16), the i2c bus (9) leading to the distribution board and receiver (13 , or 11). Full details here and here . And yet, about the receiver . Together with the main board, I immediately bought radio modems, it is very convenient. They need to be soldered and adjusted exactly according to this or this manual.Assembly and configuration
The quadcopter, in fact, is almost ready. It remains to put together the frame, the distribution board, the main board, attach the radio modem, battery and receiver. The settings are remarkably described on Andrey ’s website here and here , so I don’t see the need to rewrite this manual again. Legs had to be made from absolutely anything horrible, but this is not critical. As a result, a design that was not particularly credible came out, but it showed itself well in tests.



Test
After months of (un) fruitful work and soldering of incorrectly soldered wires, the hour "Ch" came. A relatively calm, frosty morning is a wonderful day to ditch almost two thousand dollars.



It’s very difficult to control a flying machine from a habit. Especially when it is crookedly assembled, and in the autopilot the corresponding coefficients are not configured. The tests had to be carried out with an attached multicopter, well, or at least turn on altitude control, which I forgot to do. As a result, the device soared into the sky, and from there it was carried by a passer who was starting to test for a test. By this time, I completely did not understand in which direction the onboard board was looking, and the device could not be gently planted. However, I was lucky again, and the damage turned out to be small: one carrier pipe was broken, the legs of the multicopter, and almost all the propellers were beaten off.


Now we have to redo the frame a bit, providing a protective frame, legs and so on, and after that a couple more tests, this time more careful. In addition, the issue of camera suspension remains open.
I apologize for the somewhat messy and crumpled style of presentation, in the end it turned out that most of the information is described in some detail in other sites, and my own “achievements” are more likely to correct my own mistakes, and they do not deserve attention.
Thank you for flying with our airlines.