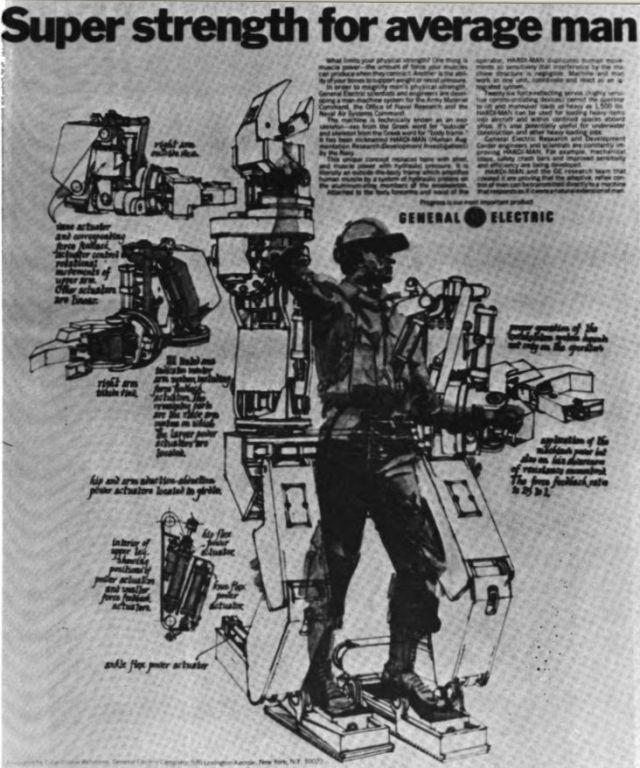
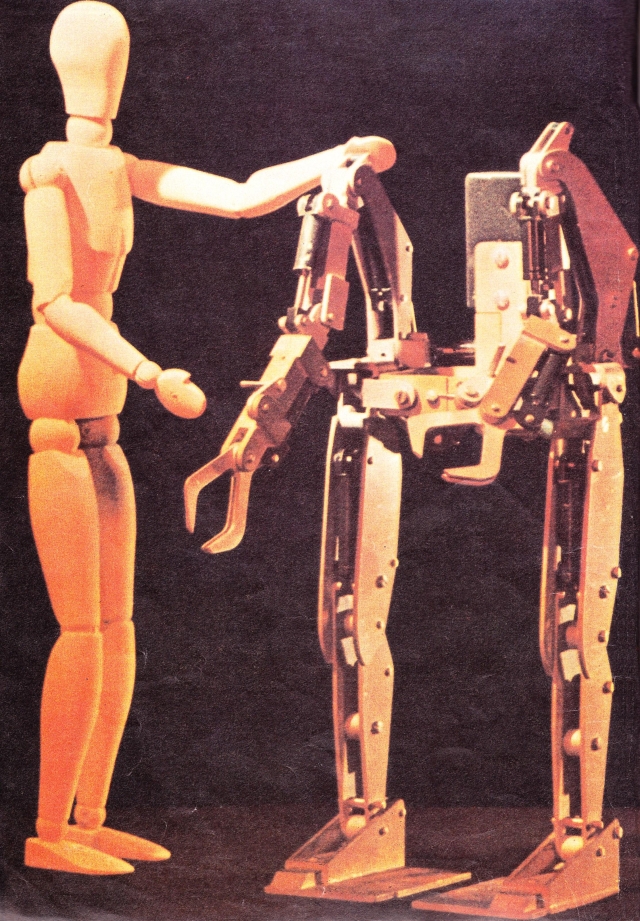
GE Hardiman - the world's first exoskeleton from the 60s of the last century

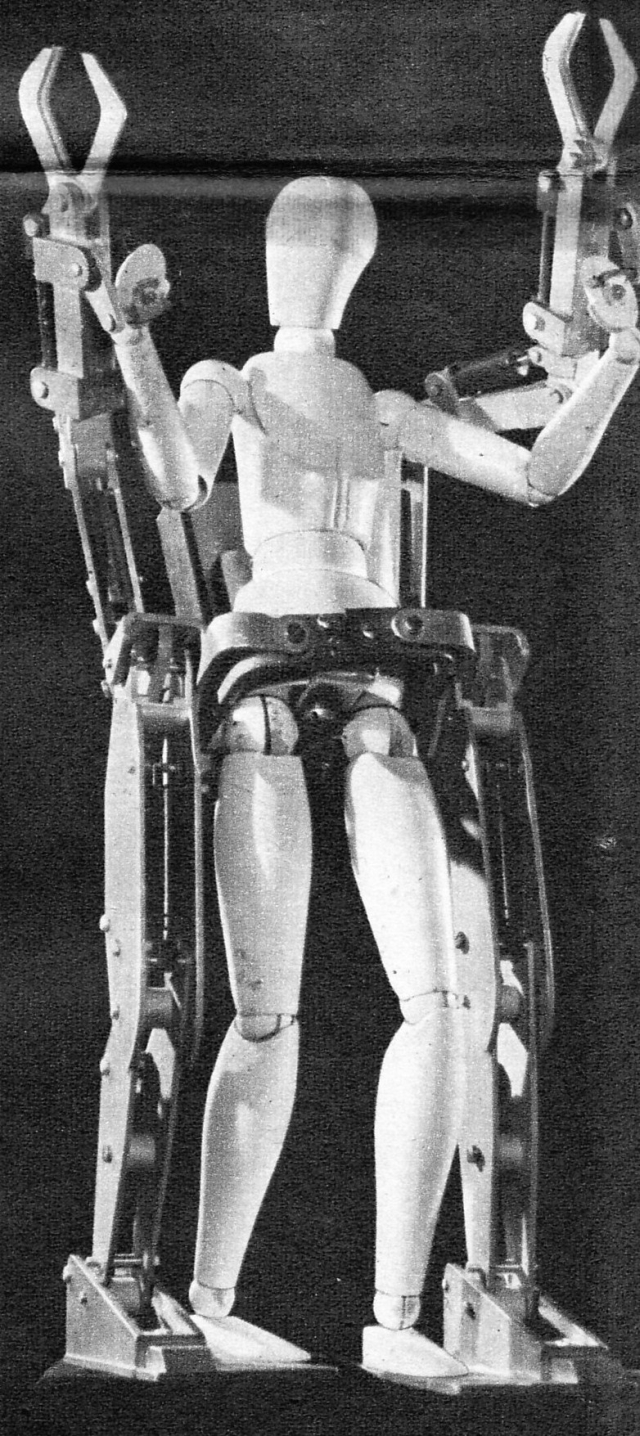
Ecoskeletons are familiar nowadays. They have not yet become commonplace, but the video with them or an article about them is no longer surprising. True, exoskeletons did not appear now, some interesting developments were created in the 60s of the last century. The first development of this type is the powerful robotic exoskeleton GE Hardiman . The announcement photo shows exactly he, and his operator. It is clear why the operator smiles - with such a system, anyone will feel like the master of the universe.
Hardiman is an abbreviation of the project “Human Augmentation Research and Development Investigation". MAN is a derivative of MANipulator. In addition, this thing was also called “Powered Exo-skeleton".

This man looks like a character from a comic.
It is interesting that some resources indicate that only one manipulator was created, and Hardiman was never fully built. But it is not. The exoskeleton was created entirely, with one half of it being static and the other moving as it should be.
Development of the project began in 1965 and closed it in 1971. The early implementation was ready in 1966, although it required significant improvement. At the end, the project was a dual system divided into upper and lower manipulators. By the end of 1967, the prototype was ready and subjected to a series of tests.
As it turned out, the exoskeleton has many problems, in particular, with hydromechanical servo drives. They were not too stable. As a result, hydromechanical servos were replaced with electrohydraulic ones.
From the outset, the developers planned to build the first "legs", and then the "hands". But in reality, the engineers acted differently.
The last version of the prototype was ready by 1970, but, unfortunately, it was impossible to walk in such an exoskeleton - it was unstable. The problem was solved by making the "legs" faster.
It is interesting that the project documentation has been preserved. Here is a report dated May 1971, but a full report for 1971. And some more documentation here .
{kind=link}
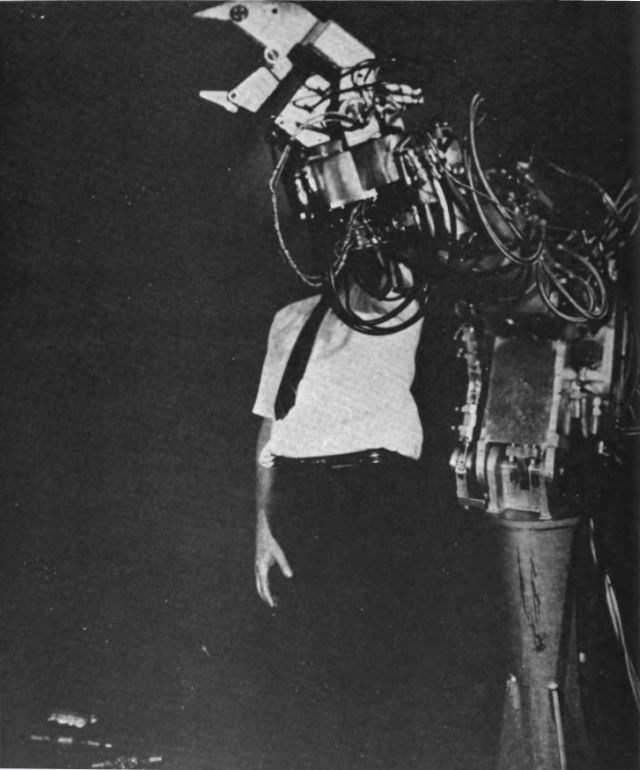
The exoskeleton isjoint development of General Electric and United States military. He could lift 110 kg with the force applied when lifting 4.5 kg. However, it was impractical because of its considerable mass of 680 kg. The project was not successful. Any attempt to use the complete exoskeleton ended in an intense uncontrolled movement, as a result of which it was never tested with the person inside. Further research was focused on one hand. Although it had to lift 340 kg, its weight was 750 kg, which was twice the lifting capacity. Without all the components to work together, the practical application of the Hardiman project was limited.

Loading bombs in the bomb bay of the aircraft.
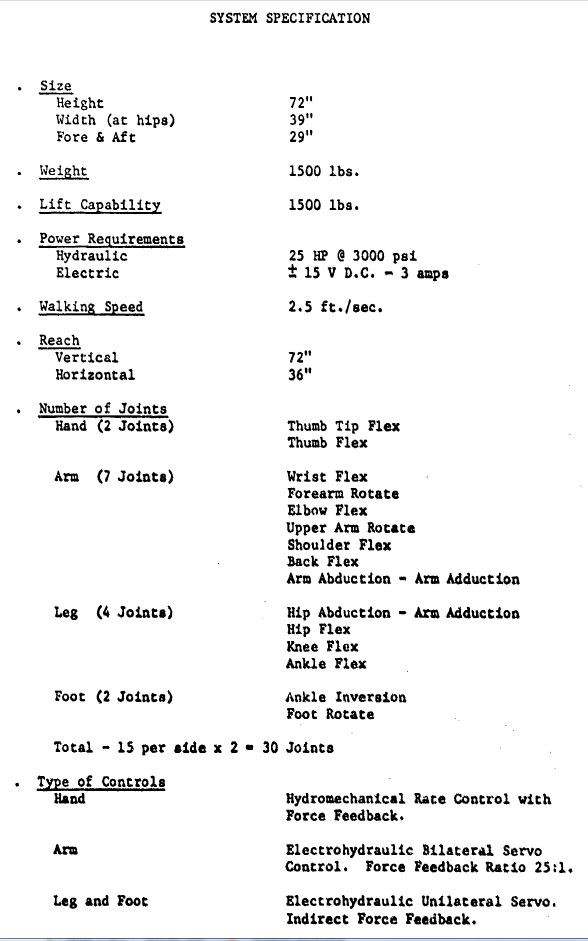
Technical characteristics of the project:
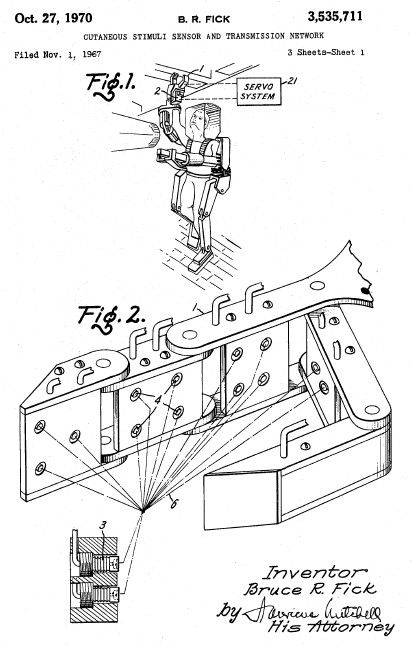
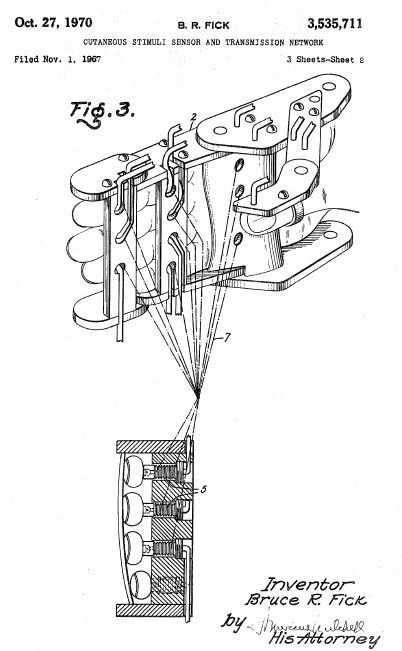
There is a patent , as without it.

Light version of the exoskeleton

And this is the Hardiman paper model. Want to create one? Here you can download everything you need.