The Return of the Prodigal Son
This story is about how I built a mobile robot platform and the fate of my “NanoBot-a” ...
It all started back in 2008, when I was young, naive and stupid, I was engaged in robotics and, in general, various mechatronics. The idea of building a large trolley settled in my exuberant head much earlier, and now, after a long gestation of a manufacturing plan, I began to build this miracle of children's thoughts.
And I gave birth to such a prototype:

Frame from a profile pipe of square section 25x25mm. And its overall dimensions are 500x500x300 mm. Well, yes, then I thought on a large scale ... Two gear motors from the wiper of an UAZ car, driving wheels from a small children's bicycle, had to move this thing, and in front there were two weathercocks. And this giant was built in the apartment.
In view of the fact that the plans for the behavior algorithms were “Napoleonic”, a full-fledged computer had to be on board the robot, there was no money for mini-ITX, and I found an ordinary PC on ATX's mom. All this was pumped into the inside and to the heap two more helium batteries, sheathed everything with a three-millimeter org. glass and in general the contraption turned out to be partly beautiful, but very large and heavy. I didn’t succeed in setting it in motion, as there were difficulties with electronics, and I periodically abandoned the project, then started working again ...

In the end, I realized that this design is very cumbersome, and since the main idea is all still remained in my head - it was decided to start all over again ...
After almost a year, I started designing. Then I was just interested in CAD and tried to study them myself, as a result I made the drawings first in AutoCAD and a little later I translated them into 3D (when I started to study COMPASS 3D). I will lay out the drawings and the model for free access, who knows who will come in handy or will be interesting.
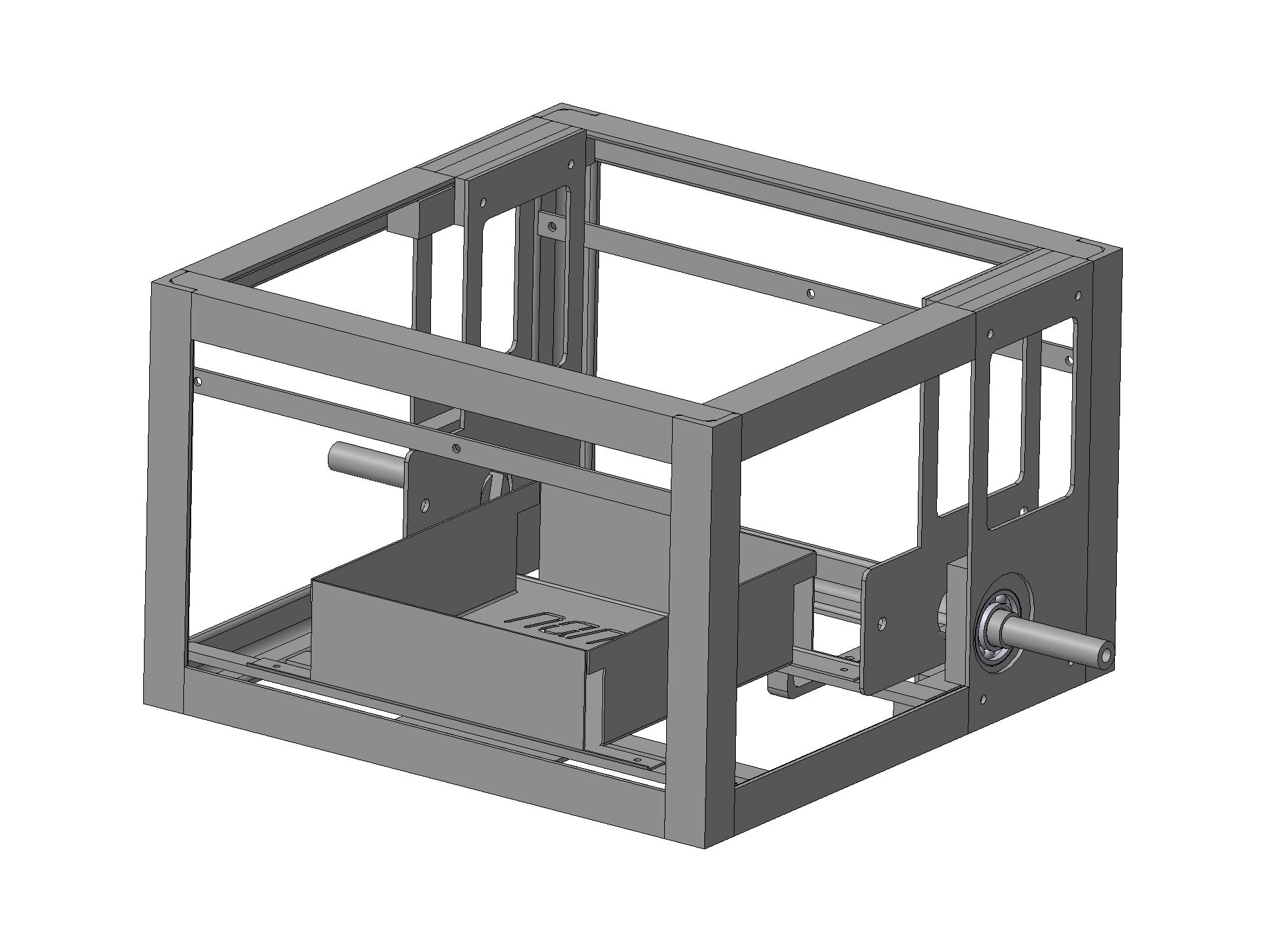
I gave the drawings to a familiar factory, where a frame was made for me for a couple of bottles of vodka (Russia - for which it is expensive). In size, it was already smaller than the previous 300x300x200, and was made from the twentieth corner. In addition, plates for engine fastening and a container for laying two 12-volt batteries were cut by a CNC laser.

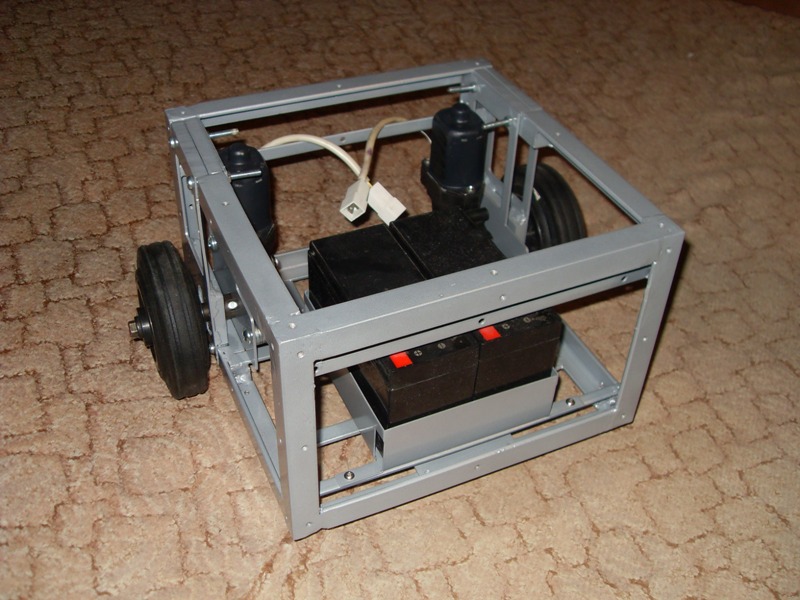
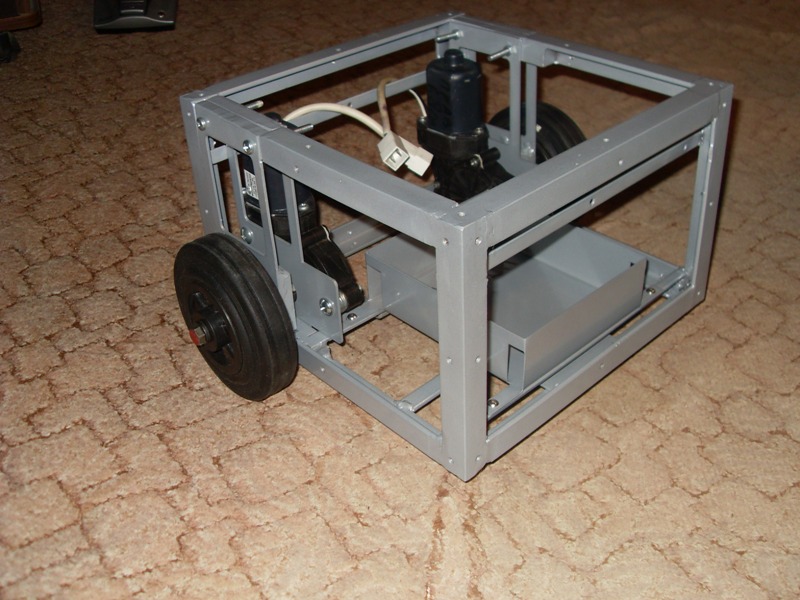
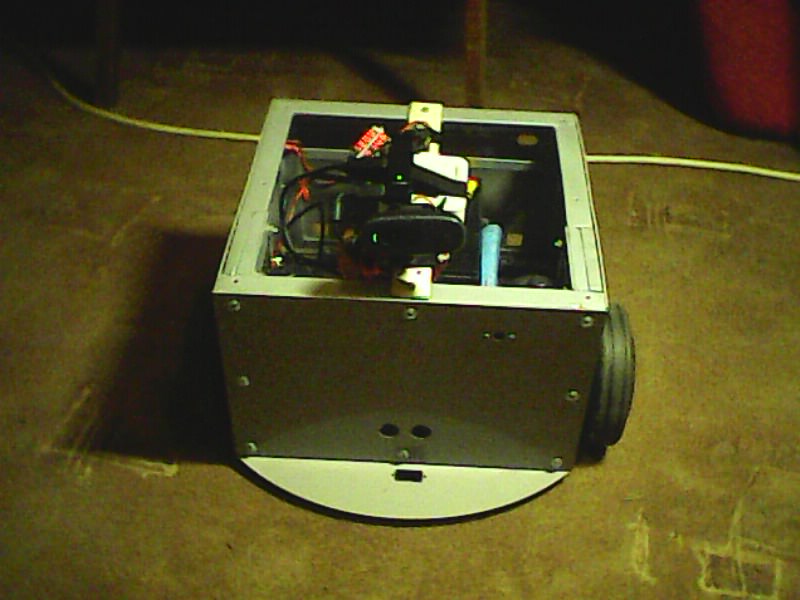
Since all this was done for a long time, the frame managed to rust, and later, I gave it for powder painting. Wheels with a diameter of 125 mm were attached directly to the engines through the additional semi-axes installed in ball bearings. Front mounted one small vane wheel. I decided to sheathe the frame with iron, then it seemed more technological than cut from org. glass, since I knew the office where they cut steel on the CNC, and then it could be painted in any color ...


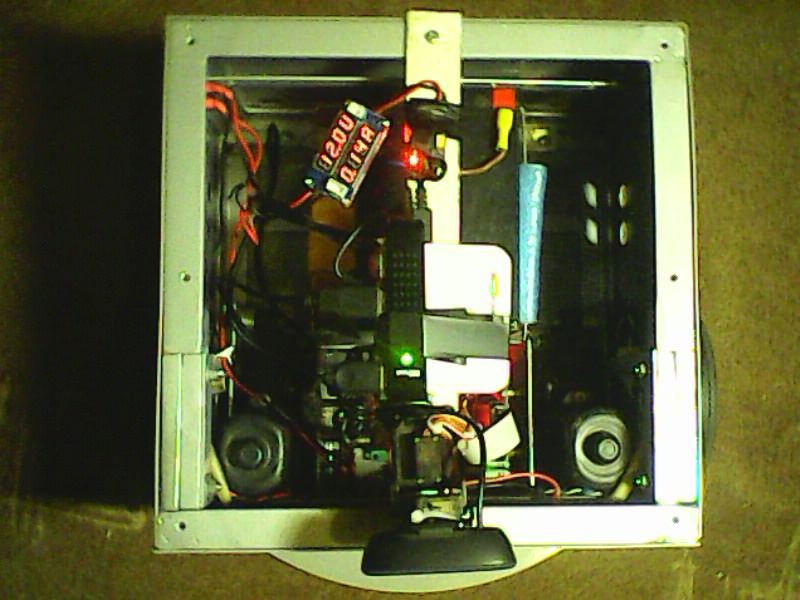
With the frame, everything seems to be clear, let's move on to electronics. It was planned to control the robot remotely from a PC, and on board the robot also planned to put something from small computers. By that time, I had already managed to cut an old ASUS netbook from a relative, in size it fit perfectly into the top of the robot above the batteries. But to control the robot, one netbook is not enough, for this it was necessary to buy three more boards from “Open Robotics”, a board based on the AVR microcontroller for controlling and collecting data OR-AVR-M128-DS, a board for communication with the OR-USB-UART netbook and power board driver OR-MD2-10A-12V-X, now I certainly would have done everything on arduino, but then it was not so popular, and these modules were designed specifically for robot carts. It was planned to connect several rangefinder sensors, a pair of encoders to the control board, planned to control several servos to change the scanning angle of the rangefinders. I wanted to make a range finder based on a laser pointer and a video camera. But it never came to that, everything was limited to connecting electronics and writing a simple program for management. Managed remotely using the TeamViewer program. In my program there was a simple connection to the port, a data transmission reception window, a speed input line (PWM in percent), and several direction buttons.
As a result, due to misunderstandings with electronics, the project was left without due attention, it was dealt with once a very rarely. Over time, I realized that it was a pity to throw the development out or put it into the garage. I decided to sell for a symbolic value. I thought that there are probably people who are also interested in this, who have better knowledge of electronics and programming, maybe someone is working out some kind of behavior / movement algorithms, well, or someone just needs an advertising platform in the exhibition hall or store (of course, he could break his legs )
I sold it entirely along with electronics, a battery, a netbook, rangefinders, and servo devices (rectangular cutouts with two holes in the lower and upper round cover for MG996r servos), a 16x2 display, and a pair of LED arrays (square cutouts in the front cladding sheet just below them).

As I understand it, the person who bought my robot platform gave her a second life. I was glad that this piece of iron will live. It was in 2016, and the journey began from the glorious city of Ivanovo, to the hero city of Tula.
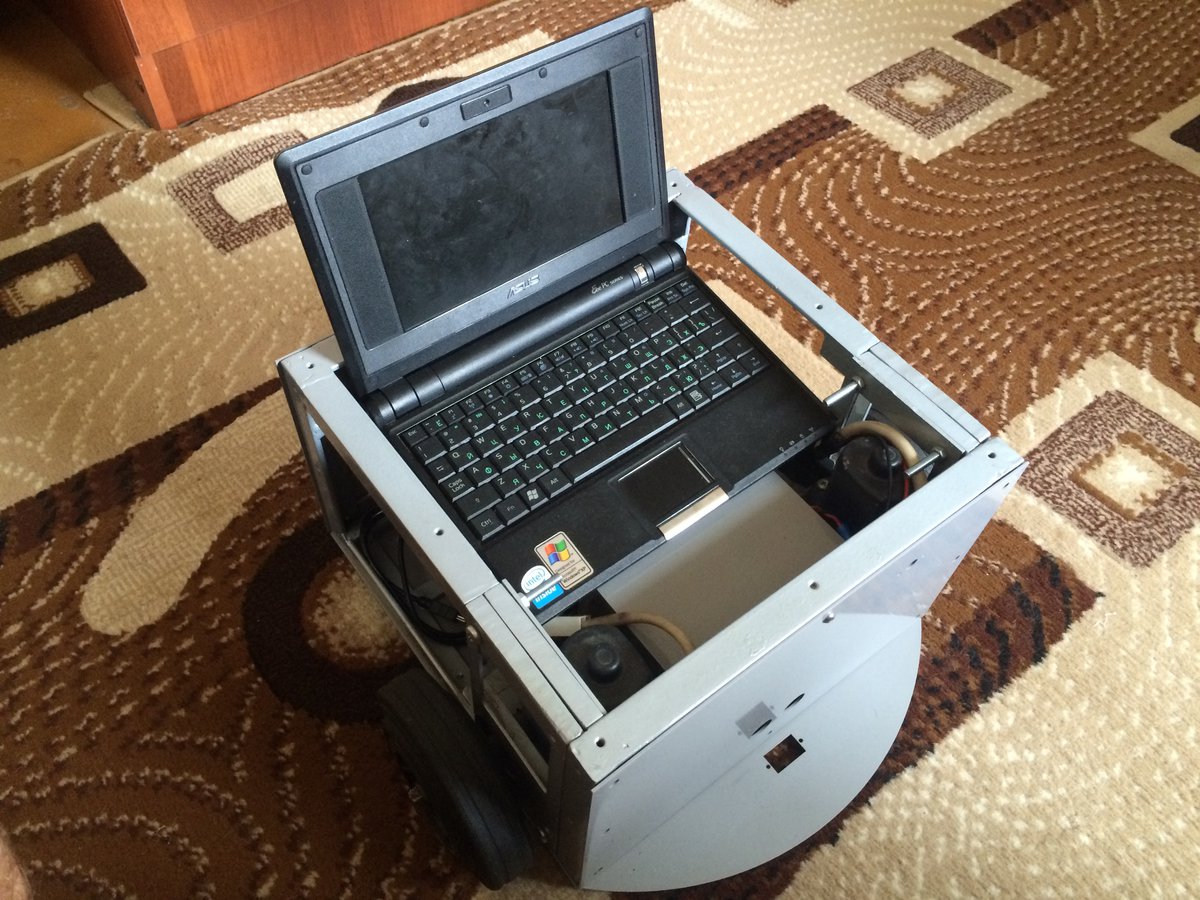
However, just recently, the third owner contacted me and said that now he has a platform (Kaliningrad region). Apparently, something went wrong with the first buyer ... The person who contacted me did not disappoint me, but the platform was handed over to him without some related components, but otherwise everything seems to be intact, but not surprisingly, since the robot skin is made of metal 1.5 mm of thickness, it’s time for him to participate in robot battles ... The
robot received some upgrade, and here’s what the new owner wrote about it:
“The platform has come to me. By some manipulations, a 10 Ah 12V battery was supplied, a TL-MR3020 router with custom OpenRobotisc firmware, Logitech C270 webcam on a bracket with a servo, a micro-hub for 4 ports and a DC-DC converter to power the router were added. Then all this was bolted with screeds, electrical tape and other improvised means. “He LIVED! (C) Robocip” An infernal 18 kg iron fool rushing around a small room like scalded and capable of knocking down legs and breaking legs at worst ... We need to change the wheels to normal ones, change the support wheel, properly fix the electronics and cultivate wires. And after all the tweaks and improvements, this miracle box will be able to drive around the yard scaring a cat and a wino neighbor. And if you put a Chinese manipulator on 6 servers, then you can paw objects remotely. ”
And this is from the freshest, latest news:
Here is such a story about my baby, I hope that the new owner will not abandon the robot, and he will live for a long time (both the owner and the robot). Otherwise, the fate of the platform to be buried under an apple tree to saturate the soil with iron. This, of course, is a definite benefit for the apple tree, but not the direct purpose of the created robot.
As for the name "NanoBot", then everything is quite simple. Probably many people remember the huge amount of advertising (on the zombie box), in which there was such a popular prefix "nano" that I decided to add this prefix to the name of my robot, especially since it fully described its physical parameters.
It all started back in 2008, when I was young, naive and stupid, I was engaged in robotics and, in general, various mechatronics. The idea of building a large trolley settled in my exuberant head much earlier, and now, after a long gestation of a manufacturing plan, I began to build this miracle of children's thoughts.
And I gave birth to such a prototype:
Frame from a profile pipe of square section 25x25mm. And its overall dimensions are 500x500x300 mm. Well, yes, then I thought on a large scale ... Two gear motors from the wiper of an UAZ car, driving wheels from a small children's bicycle, had to move this thing, and in front there were two weathercocks. And this giant was built in the apartment.
In view of the fact that the plans for the behavior algorithms were “Napoleonic”, a full-fledged computer had to be on board the robot, there was no money for mini-ITX, and I found an ordinary PC on ATX's mom. All this was pumped into the inside and to the heap two more helium batteries, sheathed everything with a three-millimeter org. glass and in general the contraption turned out to be partly beautiful, but very large and heavy. I didn’t succeed in setting it in motion, as there were difficulties with electronics, and I periodically abandoned the project, then started working again ...
In the end, I realized that this design is very cumbersome, and since the main idea is all still remained in my head - it was decided to start all over again ...
After almost a year, I started designing. Then I was just interested in CAD and tried to study them myself, as a result I made the drawings first in AutoCAD and a little later I translated them into 3D (when I started to study COMPASS 3D). I will lay out the drawings and the model for free access, who knows who will come in handy or will be interesting.
I gave the drawings to a familiar factory, where a frame was made for me for a couple of bottles of vodka (Russia - for which it is expensive). In size, it was already smaller than the previous 300x300x200, and was made from the twentieth corner. In addition, plates for engine fastening and a container for laying two 12-volt batteries were cut by a CNC laser.
Since all this was done for a long time, the frame managed to rust, and later, I gave it for powder painting. Wheels with a diameter of 125 mm were attached directly to the engines through the additional semi-axes installed in ball bearings. Front mounted one small vane wheel. I decided to sheathe the frame with iron, then it seemed more technological than cut from org. glass, since I knew the office where they cut steel on the CNC, and then it could be painted in any color ...
With the frame, everything seems to be clear, let's move on to electronics. It was planned to control the robot remotely from a PC, and on board the robot also planned to put something from small computers. By that time, I had already managed to cut an old ASUS netbook from a relative, in size it fit perfectly into the top of the robot above the batteries. But to control the robot, one netbook is not enough, for this it was necessary to buy three more boards from “Open Robotics”, a board based on the AVR microcontroller for controlling and collecting data OR-AVR-M128-DS, a board for communication with the OR-USB-UART netbook and power board driver OR-MD2-10A-12V-X, now I certainly would have done everything on arduino, but then it was not so popular, and these modules were designed specifically for robot carts. It was planned to connect several rangefinder sensors, a pair of encoders to the control board, planned to control several servos to change the scanning angle of the rangefinders. I wanted to make a range finder based on a laser pointer and a video camera. But it never came to that, everything was limited to connecting electronics and writing a simple program for management. Managed remotely using the TeamViewer program. In my program there was a simple connection to the port, a data transmission reception window, a speed input line (PWM in percent), and several direction buttons.
As a result, due to misunderstandings with electronics, the project was left without due attention, it was dealt with once a very rarely. Over time, I realized that it was a pity to throw the development out or put it into the garage. I decided to sell for a symbolic value. I thought that there are probably people who are also interested in this, who have better knowledge of electronics and programming, maybe someone is working out some kind of behavior / movement algorithms, well, or someone just needs an advertising platform in the exhibition hall or store (of course, he could break his legs )
I sold it entirely along with electronics, a battery, a netbook, rangefinders, and servo devices (rectangular cutouts with two holes in the lower and upper round cover for MG996r servos), a 16x2 display, and a pair of LED arrays (square cutouts in the front cladding sheet just below them).
As I understand it, the person who bought my robot platform gave her a second life. I was glad that this piece of iron will live. It was in 2016, and the journey began from the glorious city of Ivanovo, to the hero city of Tula.
However, just recently, the third owner contacted me and said that now he has a platform (Kaliningrad region). Apparently, something went wrong with the first buyer ... The person who contacted me did not disappoint me, but the platform was handed over to him without some related components, but otherwise everything seems to be intact, but not surprisingly, since the robot skin is made of metal 1.5 mm of thickness, it’s time for him to participate in robot battles ... The
robot received some upgrade, and here’s what the new owner wrote about it:
“The platform has come to me. By some manipulations, a 10 Ah 12V battery was supplied, a TL-MR3020 router with custom OpenRobotisc firmware, Logitech C270 webcam on a bracket with a servo, a micro-hub for 4 ports and a DC-DC converter to power the router were added. Then all this was bolted with screeds, electrical tape and other improvised means. “He LIVED! (C) Robocip” An infernal 18 kg iron fool rushing around a small room like scalded and capable of knocking down legs and breaking legs at worst ... We need to change the wheels to normal ones, change the support wheel, properly fix the electronics and cultivate wires. And after all the tweaks and improvements, this miracle box will be able to drive around the yard scaring a cat and a wino neighbor. And if you put a Chinese manipulator on 6 servers, then you can paw objects remotely. ”
And this is from the freshest, latest news:
Here is such a story about my baby, I hope that the new owner will not abandon the robot, and he will live for a long time (both the owner and the robot). Otherwise, the fate of the platform to be buried under an apple tree to saturate the soil with iron. This, of course, is a definite benefit for the apple tree, but not the direct purpose of the created robot.
As for the name "NanoBot", then everything is quite simple. Probably many people remember the huge amount of advertising (on the zombie box), in which there was such a popular prefix "nano" that I decided to add this prefix to the name of my robot, especially since it fully described its physical parameters.