Homemade inertial tracker for 3-D points and not only
Continuing the previous article .
Assembly
I assembled the tracker from the following components:
- GY-85 sensor (3 gyroscopes, 3 accelerometers, 3 magnetometers);
- Arduino Nano V3.0 boards (ATmega328P microcontroller, port CH340G). I
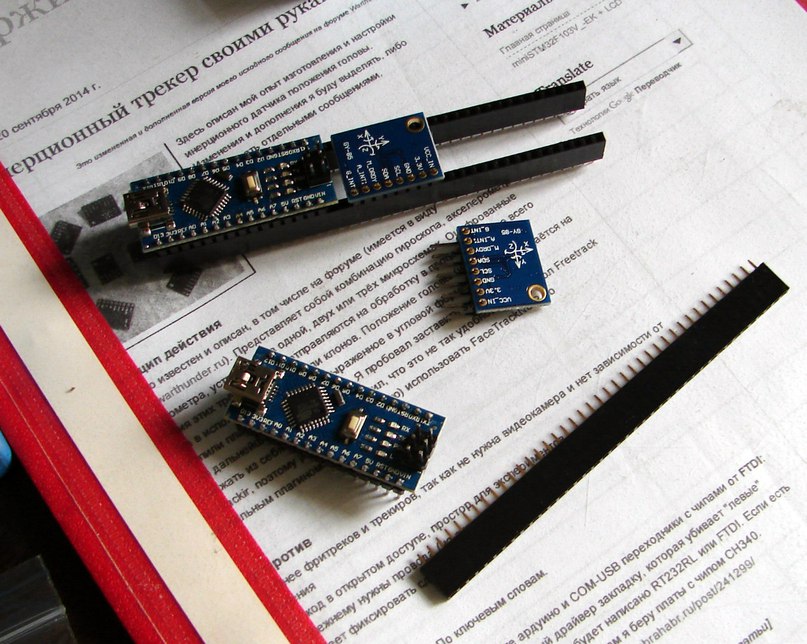
placed them on a single-row PBS female socket, connecting them with wires as follows:
Sensor -> Arduino
VCC_IN -> 3v3
SCL -> A5
SDA -> A4
GND -> GND

The software was installed in accordance with the recommendations outlined here .
After the port was determined, he programmed to Arduin - the response frame in the FaceTrackNoIR program twisted!
vk.com/video103034838_171165084?hd=1&t=3s
Settings
I had to create two different settings for the response curves in FaceTrackNoIR:
- I set a disproportionate progressive relationship between the input and output angles for working with a regular monitor - I
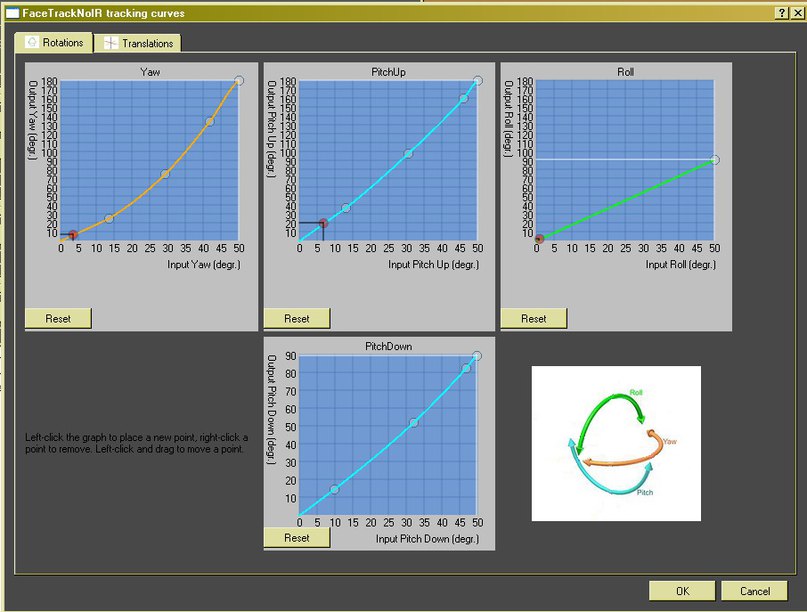
set a direct linear dependence of the angles for working with 3D glasses input-output
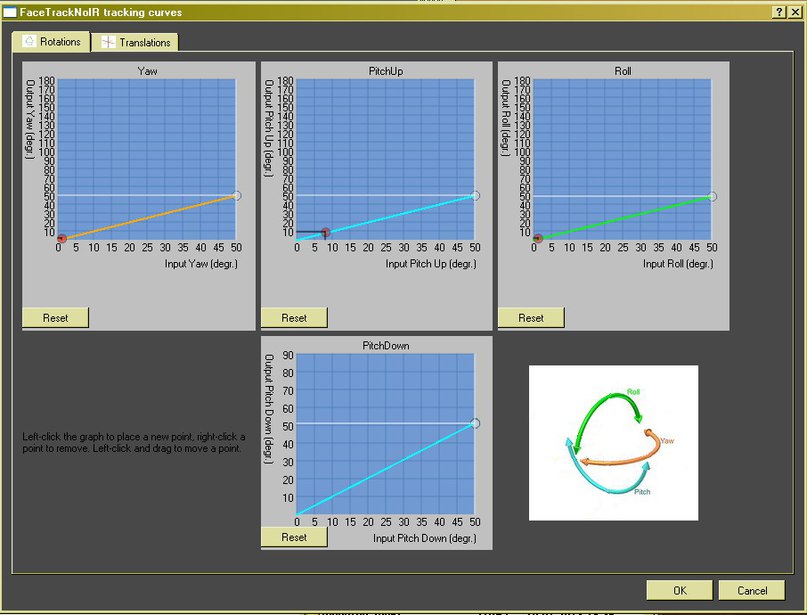
glands
After preliminary testing, I mounted the sensors with the board on an aluminum bracket mounted on soundproof headphones.
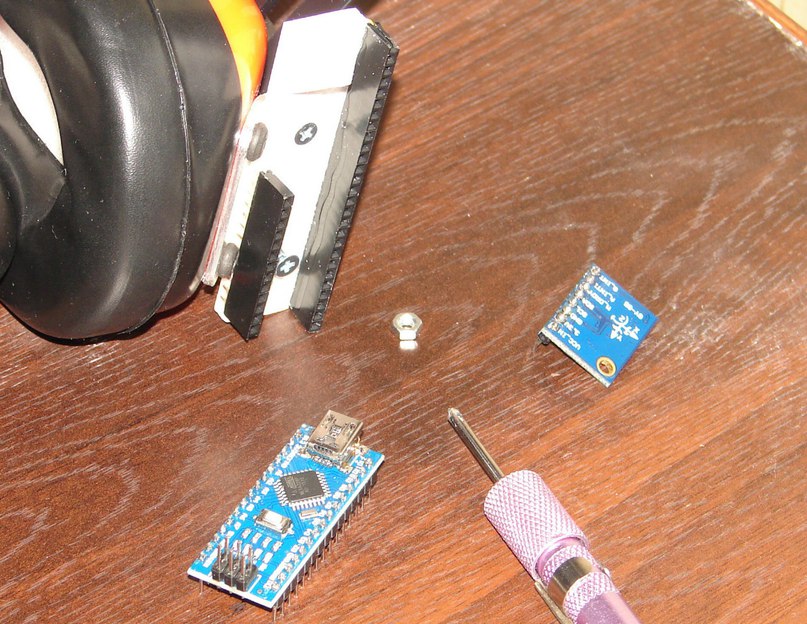
And immediately I ran into the problem of returning to the neutral position the azimuth axis (yaw), which seemed to “spring”.
I had to replace the iron fasteners with non-magnetic aluminum blind rivets, knocking out balls from them. Everything immediately returned to normal. In the oval, the unfortunate glands.

In general, any piece of iron near the sensors reduces the sensitivity of the azimuth axis. This is probably the action of the sensor magnetometer. The axis begins to "spring", strive for neutral after any rotation.
Here is the first tracker test with my 3D glasses .
vk.com/video103034838_171177959?hd=1&t=
Conclusions
This tracker is an excellent solution for applications in which you need to view the virtual space surrounding you.
FaceTrackNoIR's system resource requirements are 0.39% of the processor power and about 73 MB of RAM. It is so to say idling, offside.
Placing the tracker on the headphones allows you to use it both with 3D glasses and separately.
With a conventional monitor, the movement of the image on the screen is towards the rotation of the head.
3D glasses do not have this contradiction - everything is proportionate and codirectional.
What with the monitor, what with glasses, fast head movements inevitably cause blurry images. With smooth turns with fixations of the direction of view, the perception of the virtual world is quite comfortable and natural. But it requires careful tuning of the response curves, delays and damping in the program. It seems to me strictly individual.
A tracker is subjectively better than keys or a joystick hut.
3D glasses + Tracker = Virtual Helmet!
I tested it in the LockOn 2 and Ka-50 flight simulators, as well as in the Orbiter 2010 space simulator.
When using the tracker with 3D glasses together, it feels like “we removed the blinkers.” Finally, there was an opportunity to look around!
Interesting sensations, difficult to compare with anything. After using it, the question revolves around the head: “What was that ?!”
In general, I am satisfied with the result of the symbiosis of glasses and tracker. But this thing is addictive. Therefore, I use my "virtual helmet" dosed.
A return to reality after virtuality is also pleasing ...
The picture of the world around us is still not so bad ...
A helmet with its cardboard-cartoon contents only confirms this! But the thing is funny ... So I will use it!
Assembly
I assembled the tracker from the following components:
- GY-85 sensor (3 gyroscopes, 3 accelerometers, 3 magnetometers);
- Arduino Nano V3.0 boards (ATmega328P microcontroller, port CH340G). I
placed them on a single-row PBS female socket, connecting them with wires as follows:
Sensor -> Arduino
VCC_IN -> 3v3
SCL -> A5
SDA -> A4
GND -> GND
The software was installed in accordance with the recommendations outlined here .
After the port was determined, he programmed to Arduin - the response frame in the FaceTrackNoIR program twisted!
vk.com/video103034838_171165084?hd=1&t=3s
Settings
I had to create two different settings for the response curves in FaceTrackNoIR:
- I set a disproportionate progressive relationship between the input and output angles for working with a regular monitor - I
set a direct linear dependence of the angles for working with 3D glasses input-output
glands
After preliminary testing, I mounted the sensors with the board on an aluminum bracket mounted on soundproof headphones.
And immediately I ran into the problem of returning to the neutral position the azimuth axis (yaw), which seemed to “spring”.
I had to replace the iron fasteners with non-magnetic aluminum blind rivets, knocking out balls from them. Everything immediately returned to normal. In the oval, the unfortunate glands.
In general, any piece of iron near the sensors reduces the sensitivity of the azimuth axis. This is probably the action of the sensor magnetometer. The axis begins to "spring", strive for neutral after any rotation.
Here is the first tracker test with my 3D glasses .
vk.com/video103034838_171177959?hd=1&t=
Conclusions
This tracker is an excellent solution for applications in which you need to view the virtual space surrounding you.
FaceTrackNoIR's system resource requirements are 0.39% of the processor power and about 73 MB of RAM. It is so to say idling, offside.
Placing the tracker on the headphones allows you to use it both with 3D glasses and separately.
With a conventional monitor, the movement of the image on the screen is towards the rotation of the head.
3D glasses do not have this contradiction - everything is proportionate and codirectional.
What with the monitor, what with glasses, fast head movements inevitably cause blurry images. With smooth turns with fixations of the direction of view, the perception of the virtual world is quite comfortable and natural. But it requires careful tuning of the response curves, delays and damping in the program. It seems to me strictly individual.
A tracker is subjectively better than keys or a joystick hut.
3D glasses + Tracker = Virtual Helmet!
I tested it in the LockOn 2 and Ka-50 flight simulators, as well as in the Orbiter 2010 space simulator.
When using the tracker with 3D glasses together, it feels like “we removed the blinkers.” Finally, there was an opportunity to look around!
Interesting sensations, difficult to compare with anything. After using it, the question revolves around the head: “What was that ?!”
In general, I am satisfied with the result of the symbiosis of glasses and tracker. But this thing is addictive. Therefore, I use my "virtual helmet" dosed.
A return to reality after virtuality is also pleasing ...
The picture of the world around us is still not so bad ...
A helmet with its cardboard-cartoon contents only confirms this! But the thing is funny ... So I will use it!