A robot with a record vertical jump indicator mastered parkour
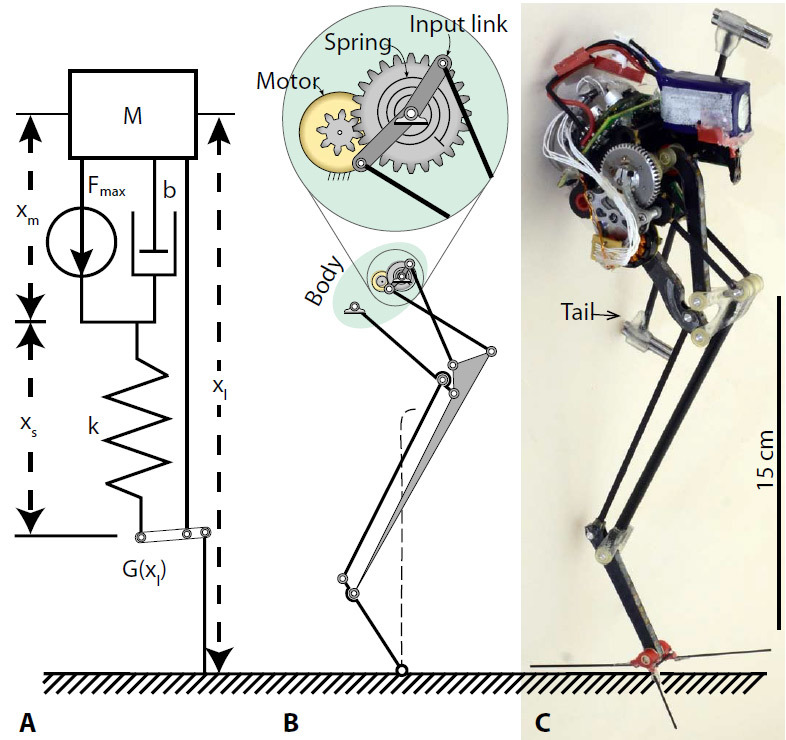
Energy storage scheme for modulating power before a jump in the SALTO robot. Illustration: University of California at Berkeley
Engineers from the University of California at Berkeley designed the 100-gram SALTO (SAtatorial Locomotion on Terrain Obstacles) robot , which overcomes multi-meter obstacles by quickly jumping one meter high. The main idea is that the power developed during the jump exceeds the power of the robot motors. The idea of energy accumulation and release (power modulation) was borrowed in the animal world, namely, from the Senegalese galago, a small African animal with big eyes.
Following the example of the Senegalese galago, the SALTO robot makes a series of consecutive jumps, including pushing against vertical walls, as in parkour. Perhaps such machines will find application in the army and the Ministry of Emergencies.
When constructing the SALTO robot, scientists studied animals with maximum vertical jumping ability. In nature, there are only a few mammals that can jump to a height of more than two meters from a state of rest, with the possibility of an immediate repetition of such a jump. The record holder among these animals is the Senegalese galago ( Galago senegalensis ).

Senegalese Galago (Galago senegalensis)
The animal is adapted for nightlife. The body length of the Senegalese galago is from 13 to 21 cm, the tail length is from 20 to 30 cm. The weight is from about 200 to 300 g.
Power modulation
Senegalese galago is able to overcome vertical obstacles of up to five meters using a unique jumping system, known in the literature on biomechanics as power modulation or power amplification. This term means that the instantaneous power given out by the animal’s muscular-tendon complex exceeds the maximum strength of its muscles . Such "spring" complexes were found in a variety of species, including chameleons, salamanders, sea needles, some rotopods, and other animals.
In the process of modulating power, muscles transfer energy to accumulate in a series of elastic structures connected in series or in parallel to accumulate. Then this energy is released simultaneously, so that the total return exceeds the strength of the muscles alone. The robot uses springs or rubber bands to store potential energy.
The location of these elastic structures determines the order of energy input from the drives and the way it is converted from potential to kinetic. Engineers from the University of California at Berkeley have set the goal of developing an elastic drive with a serial connection that will show the maximum rate of vertical jumping.
Vertical jumping
Vertical jumping is the quotient of the jump height and the sum of the time it takes to prepare the jump and the flight time to the highest point. That is, vertical jumping is equal to
h / (t 1 + t 2 )
Scientists measured the vertical jumping parameter in various robots and living organisms. The measurement result is shown in the graphs.

The left graph shows how high the drives of different designs with different vertical jumping ability can overcome in 4 seconds. For example, parallel-elastic robot EPFL Jumperin 4 seconds it jumps once to a height of 1.3 meters, which corresponds to a vertical jumping rate of only 0.34 m / s. For Minitaur, this figure is 1.1 m / s. Finally, in the SALTO robot presented in this scientific work (marked in red), the vertical jumping ability is 1.7 m / s. Each jump per meter takes only 0.58 s. This means that in four seconds such a robot can drop by almost seven meters. For comparison, in a living Senegalese galago, the vertical jumping ability is 2.2 m / s.
The right graph shows that SALTO has an almost perfect combination of maximum height and frequency of jumps. It is due to such an ideal combination that he demonstrates a record rate of vertical jumping among all robots in the world.
The previous record holder for this indicator wasMinitaur , a much larger and apparently quite awkward robot (jumping 48 cm in 0.43 s). Israel's TAUB robot , modeled after locusts, holds the record for absolute jumping height . He has a jump height of 3.2 m.
The mechanics of the 26-centimeter one-legged SALTO can be tried in other robots, including robots with a large number of legs, which also use an elastic drive with a serial connection . These are robots such as StarlETH , ANYmal and ATRIAS .
Imagine that powerful “muscle-tendon” complexes like SALTO’s put on a humanoid robot like Atlas ? Such an adversary would not at all want to face in a dark alley.

Boston Dynamics Atlas Robot
Scientific work published December 6, 2016 in the first issue of the new Science Robotics journal(doi: 10.1126 / scirobotics.aag2048). The study was funded by the US National Science Foundation and the US Army Research Laboratory under the Micro Autonomous Systems and Technology Collaborative Technology Alliance .