Why driving a car is a challenge even for an AI
Probably every driver from time to time tries to evaluate his driving skill. When you tell, say, children how it is to drive a car, you wonder how and why you know when the car in front turns left or right. Why attention is automatically focused on the dog walking along the road, but does not react to the branches of the trees hanging over the road. There are many such questions, and there are not all the answers.
In order to learn to drive, you need to understand many principles and know the rules - this is important both for a person and for artificial intelligence. The latter should pay attention to the assessment of thousands of factors - where and when to slow down, where to roll, and where to accelerate.
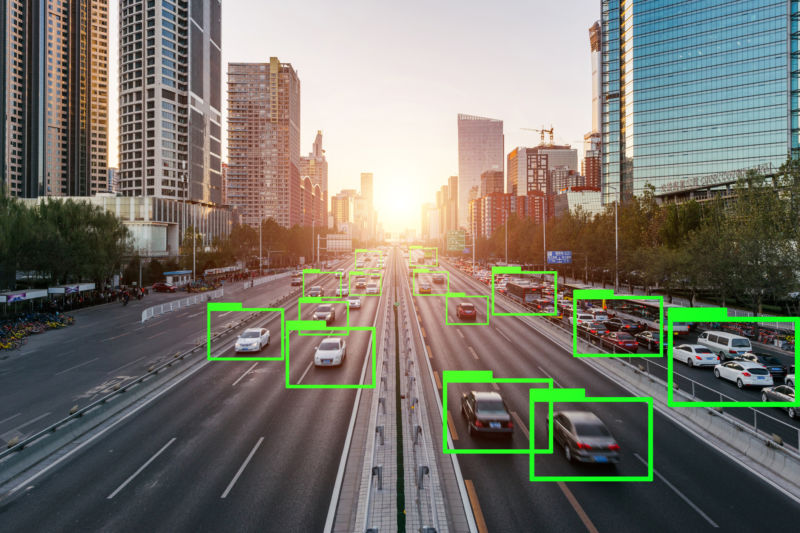
Cars with the highest levels of autonomy should not only recognize the markup, signals and everything else, but also be able to quickly respond to unusual situations that are many on the road. Even robobomics, which have been developing for years, do not always adequately respond to such situations.
As an example, lead robomobil Uber, software which has decided to ignore the implicit object on the road, which turned out to be a woman in dark clothes, and even a bicycle crossing the road in the wrong place.
Currently, it is customary to allocate six levels of machine autonomy - from zero (all operations are performed by a person, there is no autonomy) to the fifth (all operations are performed by the on-board computer without human intervention). In the overwhelming majority of cases, robo-mobiles have reached the second level of autonomy, including the notorious Tesla with its advanced autopilot.
Daimler has made good progress, but its robocars are tested in Germany, where the road markings themselves are almost perfect, and drivers traditionally follow the rules of the road.
Waymo is also making good headway - the other day, it saidabout launching a fully autonomous robotaxy service. True, the driver is still present in the cabin, whom the company called the "security operator". If something goes wrong, the operator will take control. Most likely, robomobils of higher levels of autonomy will not appear on the roads until the 20s, or maybe. And later.
Most likely, complete autonomy can be achieved only after the appearance of a specialized infrastructure, which should be almost smarter than the mobile itself. The latter must independently learn and understand what is happening around, then - to make decisions without the participation of the operator.
As an example, you can bring a situation when a passenger is traveling in a robo mobile, on a rainy evening. Suddenly, the cat goes ahead. What should a robomobil do? Obviously, his systems must recognize the obstacle ahead, so that the machine performs the necessary maneuver. But it is necessary to know the local rules of speed, to imagine how slippery asphalt can be, plus to understand where the car is at this point in time. Some of the information can be obtained from third-party sources (the same weather forecast, temperature, humidity and wind conditions), which requires a wide and reliable Internet channel - most likely 5G.
In addition to the cat, there may be other obstacles around - for example, robomobils, who are also trying to avoid a collision. That is, robomobils should be able to “communicate” in order to have a good idea of each other’s actions at any given point in time. And you need to communicate in real time. Otherwise, a collision is inevitable, which is fraught with danger to the health and life of the owner of the car.
Plus, the robomobil should also be able to work out the best path to the final point of the journey. This means that the car needs map data, marking information, signs and other information. In order to expand the range of roboMobiles opportunities, they should keep in touch with each other all the time in order to exchange information about their surroundings. But there is still the question of machines that are controlled by people, it turns out that they must also be equipped with communication systems with mobile phones - otherwise the latter will not understand what the first are doing.
Well, if we imagine that something can happen to the widest communication channel, let the problem be temporary, then the situation becomes even more complicated. And we have not mentioned the usual problems like the "problem of the trolley", plus many others.
Most likely, AI 4-5 levels of autonomy can not wait for the next few years - they will appear very soon.