Dream to fly with electrotechnical bias
This article is written to summarize my experience in the independent production of a power plant for an electric power generator, and in fact: an electric motor, controller, battery, and other attachments.

Like most people, since my childhood I was interested in the subject of flight, but it turned out that I took up real flights in the airspace, and not on the simulator or radio-controlled model, not so long ago, in 2014. I chose a paraglider as the most democratic type of aircraft.
At the initial stage of motorless flights, when every minute spent in the air is expensive, you often think about the advantages of motor flight, but you also see the disadvantages - increased noise and vibrations of a primitive two-stroke engine, the smell of fuel during transportation and storage of the installation. And since I had a successful experience of self-electrification of a bicycle, it was decided to do electrical installation.
After thinking about various designs, I stopped at the many-implemented scheme of a gearless propeller drive with an electric motor of large diameter but small thickness.

Flat as a pancake electric motor gives acceptable torque with a small weight, dimensions, and complexity of the design. Greater efficiency can be achieved by applying a compact high-speed electric motor with a gearbox (I was convinced of this on my electric bike), but the complexity of manufacturing such a gearbox, and most importantly its considerable noise, was made to abandon this idea.
Without further ado, based on the pictures and sketches of the famous HPD10 electric motor from the network, I drew my motor in Solid in a few days.
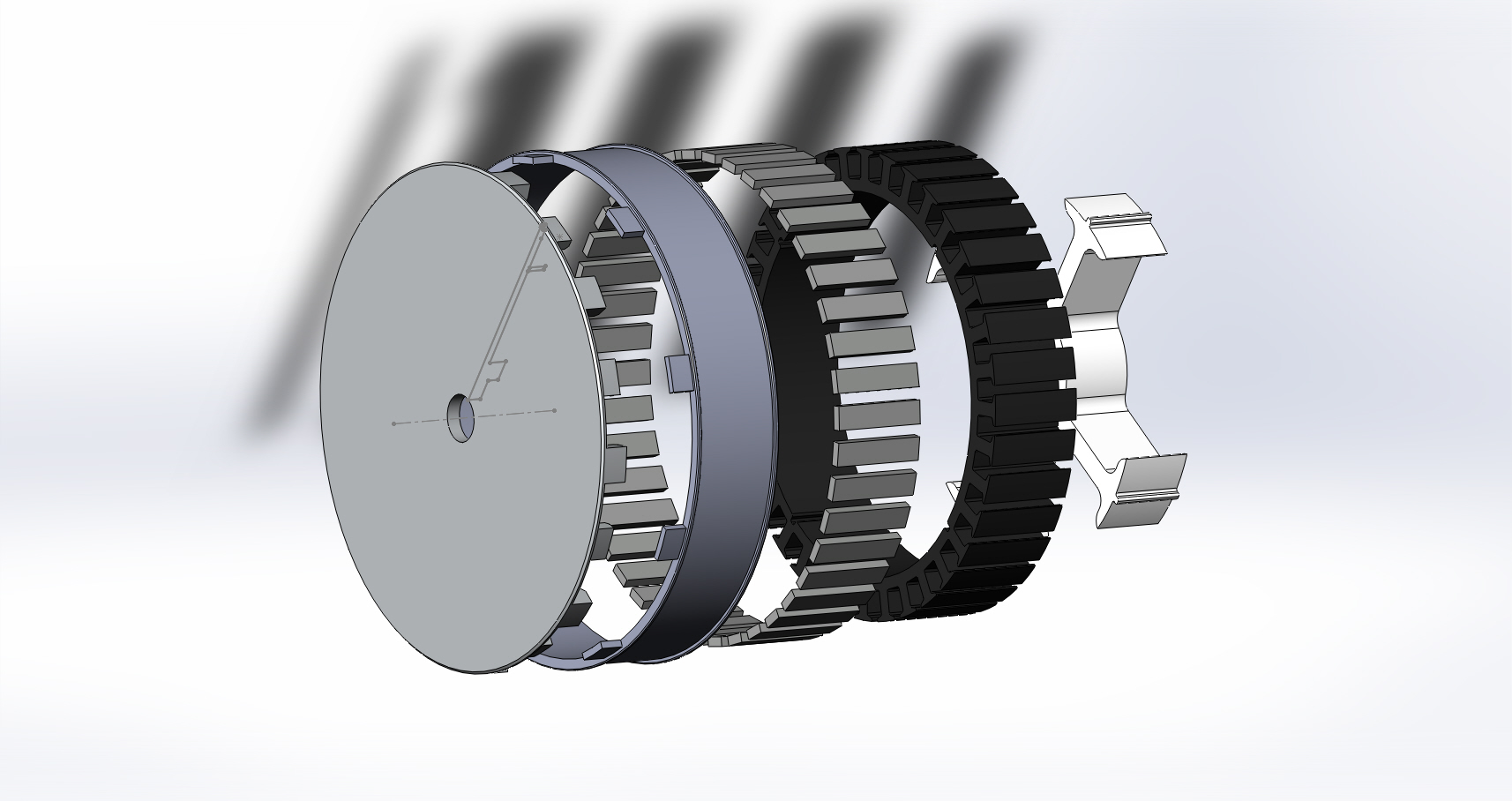
From the progenitor remained unchanged only the profile of the stator plates, which I think the German designers took no changes from the obscure bicycle motor-wheel.

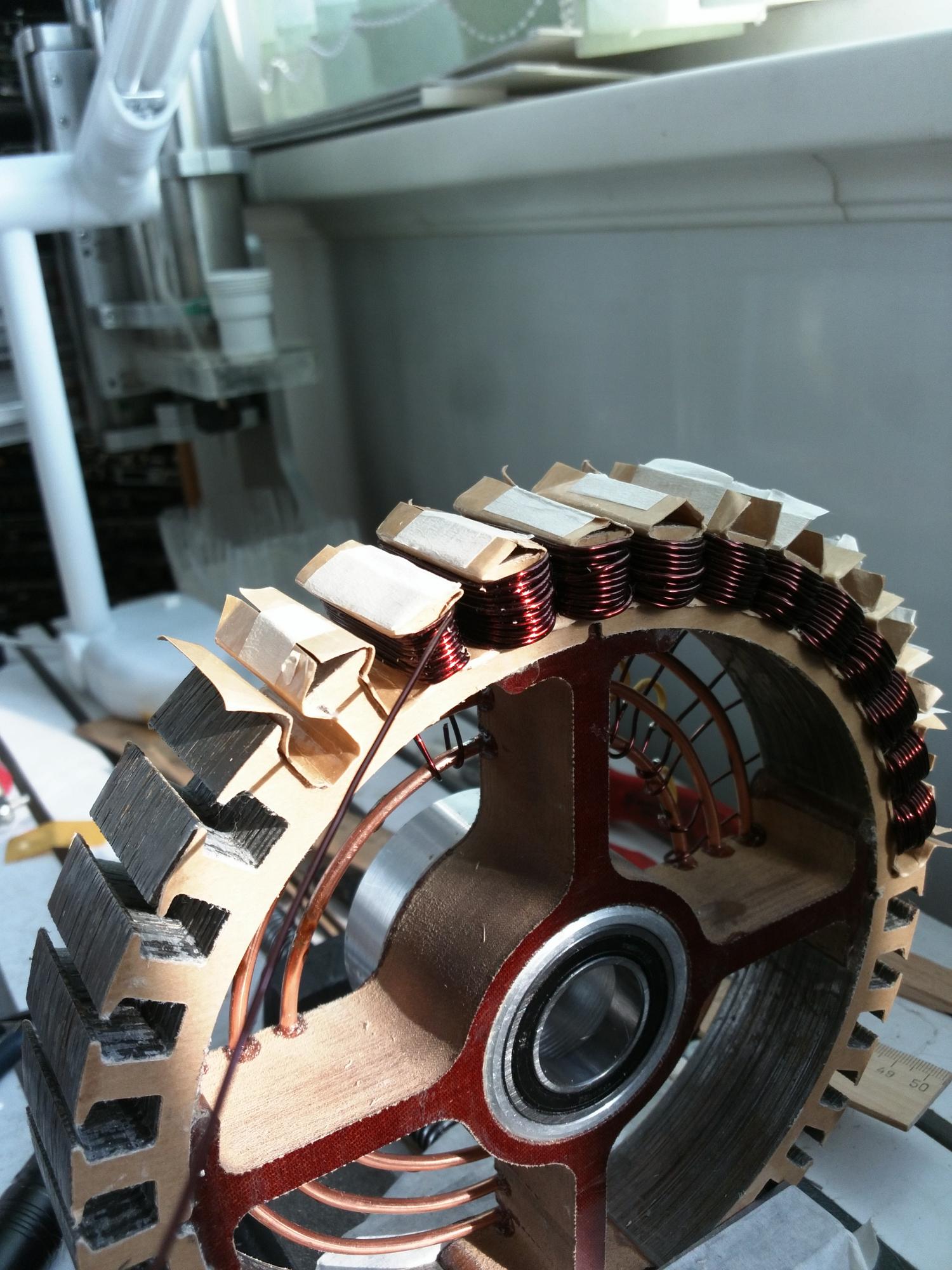
The most important part, the stator magnetic core must be made of a set of plates of special isotropic magnetic steel with a thickness of not more than 0.35 mm. After a long search, in St. Petersburg a company was found ready to fulfill my small order.

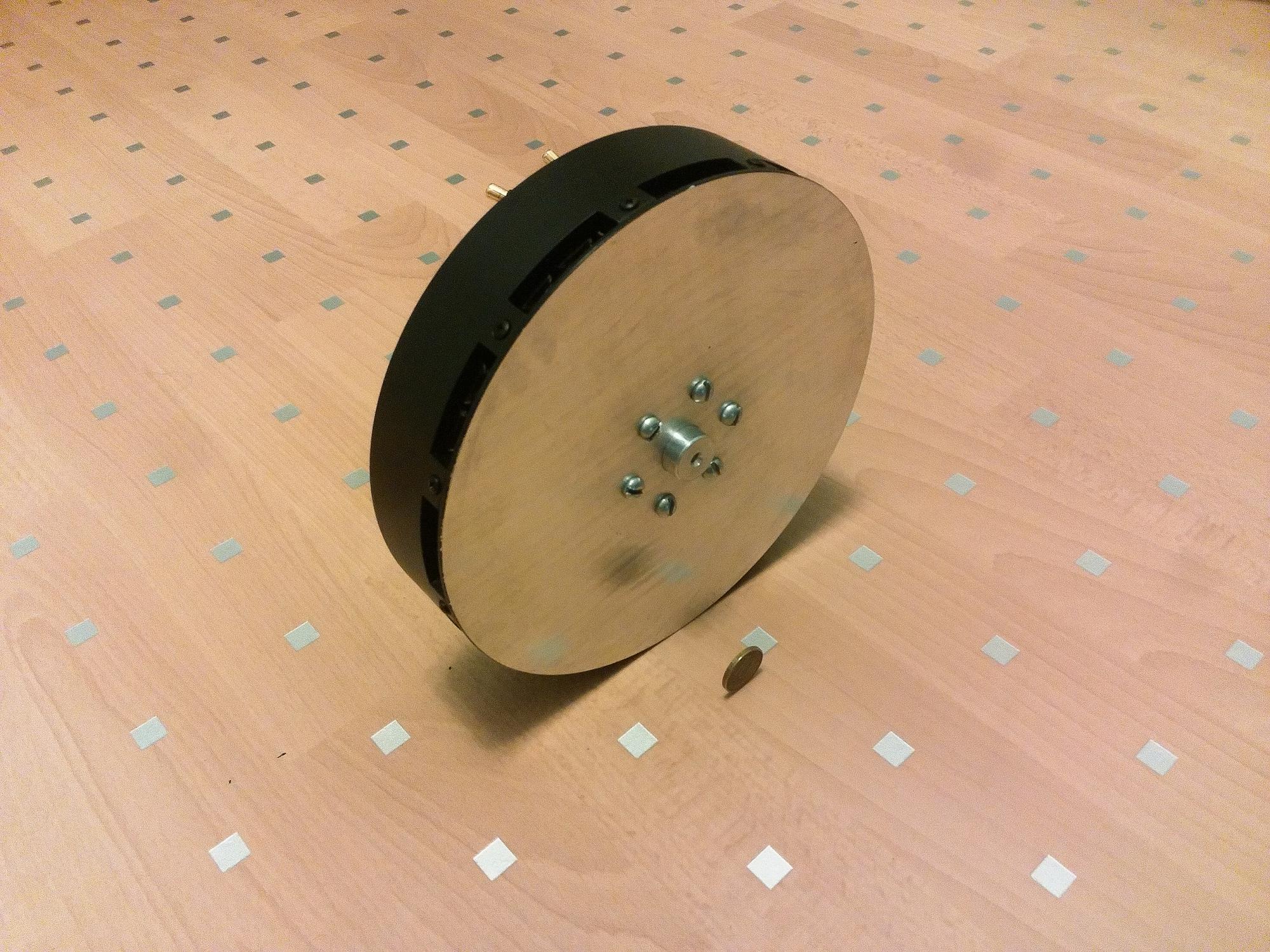
The rotor ring is made of a suitable pipe found in scrap metal.

The disk is milled from a D16T plate, the hub is made of thick PCB.


Final winding, the most boring work.
Ready intermediate sample, power 12kW, maximum voltage 100 V.
At the stage of calculating the winding of the motor, I increased the maximum voltage, compared to the prototype twice, to 100v. At that moment I did not think about the pitfalls of this solution, the main plus I saw in a twofold decrease in current, hence the series connection of relatively low-current batteries, connecting wires and connectors of smaller sections.
The reality turned out to be less rosy, the available controllers at that time were with a lower maximum voltage or current, often did not know how to work in a non-sensory mode, or they were indecently expensive.
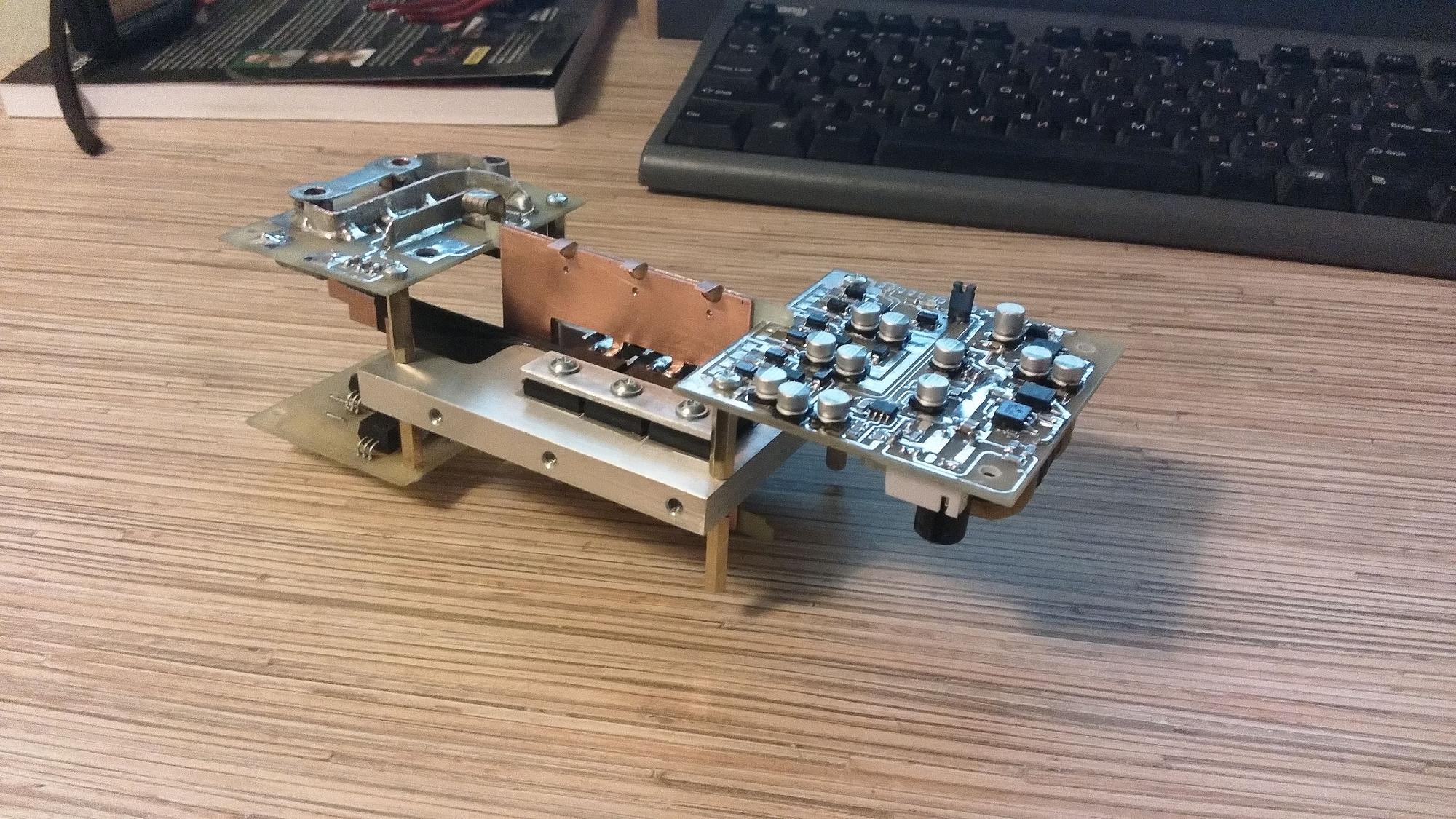
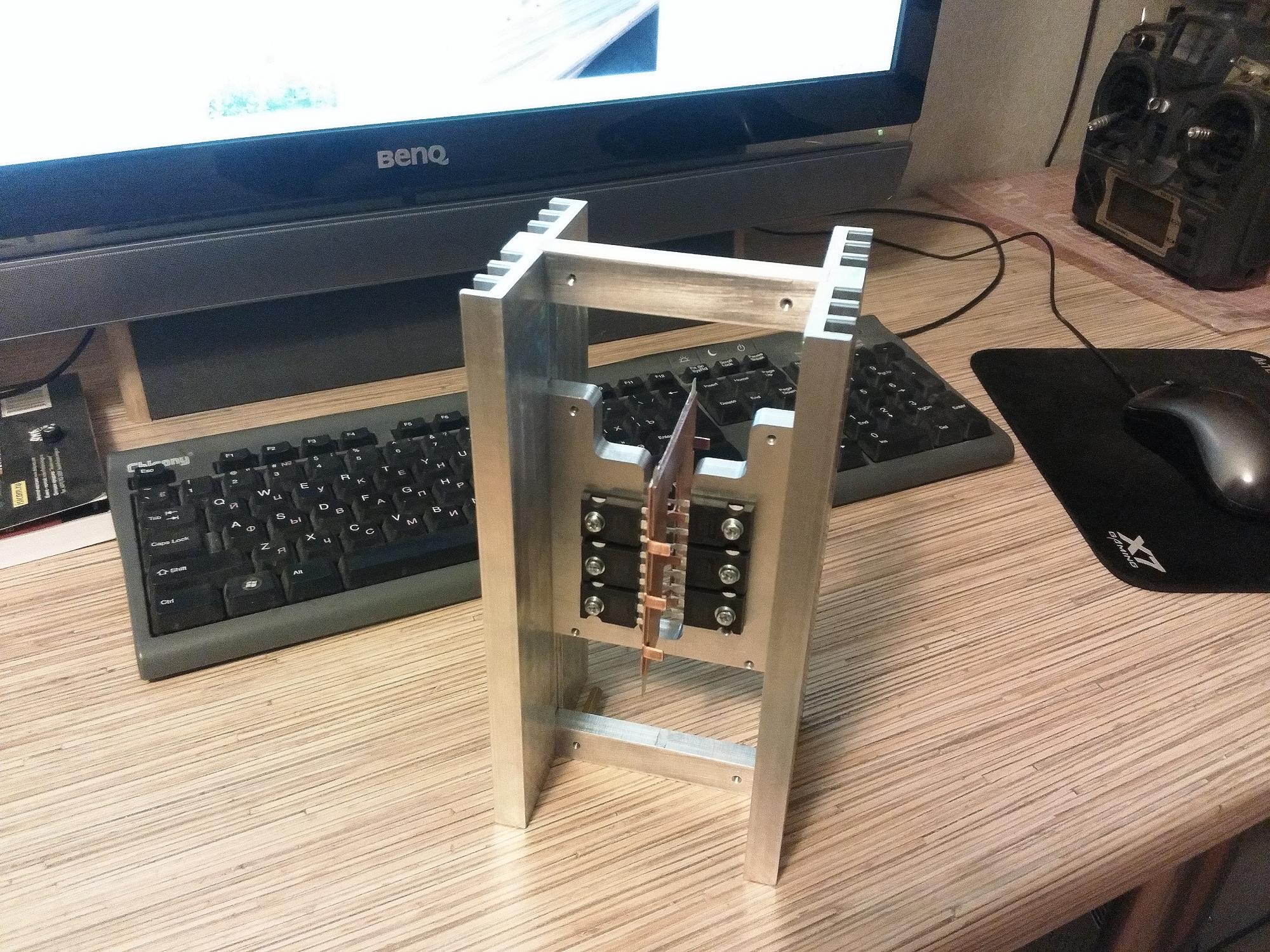
Well, after thinking, I decided to make the controller myself. Prior to this, from a similar I did only a simple BLDC controller on the AVR, with the firmware of the freaked out part of the apnotes. Therefore, soberly assessing my time and energy, I stopped at a half-open vector projectLebowski controller , author with endless-sphere.com
The author sends out stitched dsPIC30, the rest you have to do yourself. Scaling the recommended output stage circuits, I got what I needed, spending a little money, and burning only one set of power transistors in debugging. The maximum phase current of the controller 200 A, voltage up to 150 V.

The reverse side of the project without source, the inability to upgrade the firmware for themselves, the need to purchase a new firmware controller if you burn the existing one. Rake with a voltage of 100 hit and here, limiting the choice of power transistors.
After the motor and controller, making the battery seemed like a cakewalk, but there were problems here too. Having bought 24 LI-PO IMP3201057P22A cells, I collected three batteries of 8S each, with 200 A continuous currents and 400 A short-term ones.



Everything is good, the batteries are powerful, almost do not heat up to 120 amperes, but the weight collected is almost 15 kg, sad. As a result, the entire unit assembly turned out to weigh 32 kg, heavier than many benzinki. It did not suit me at all. Resolved - the batteries are sold, we are making new batteries.
It was necessary to make a battery with a weight twice as small, and the flight time was about 15 minutes. I stopped at cells 18650 inr18650-25r, which I ordered from the Netherlands and got it safely. Shells made the most light but durable, the cells are connected by soldering, believing that welding with an artisan machine would do more harm than thoughtful soldering.
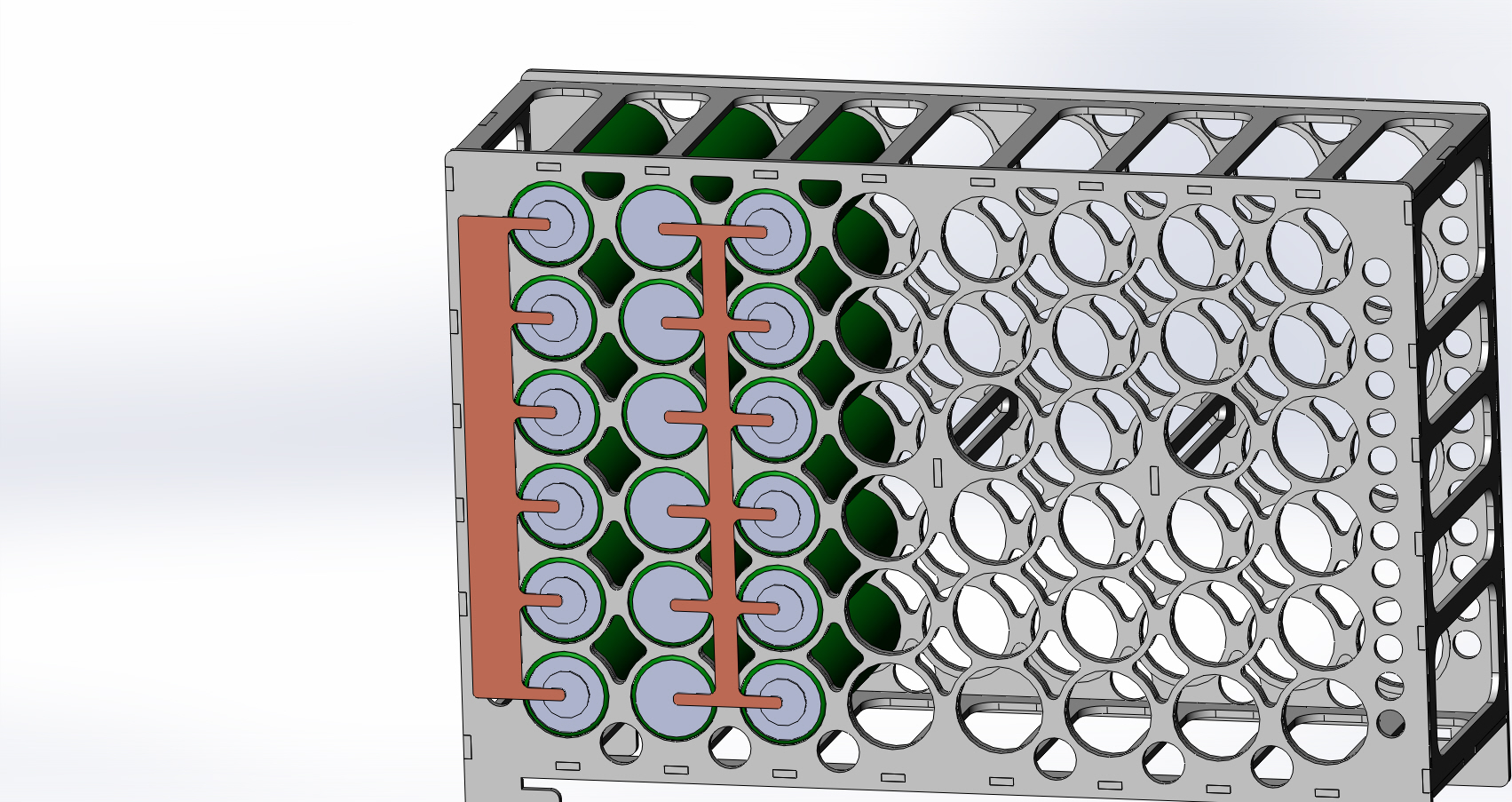

As a result, I received three 8S6P configuration batteries with a maximum continuous current of 120 A, with a capacity of 15 Ah. The removal of the maximum permissible currents is possible due to the good purging of elements installed with air gaps in the flow from the screw. Pleases the minimum variation of characteristics, after all Samsung. The total weight of the assembly on the bracket is 7800 grams, almost met the planned one.

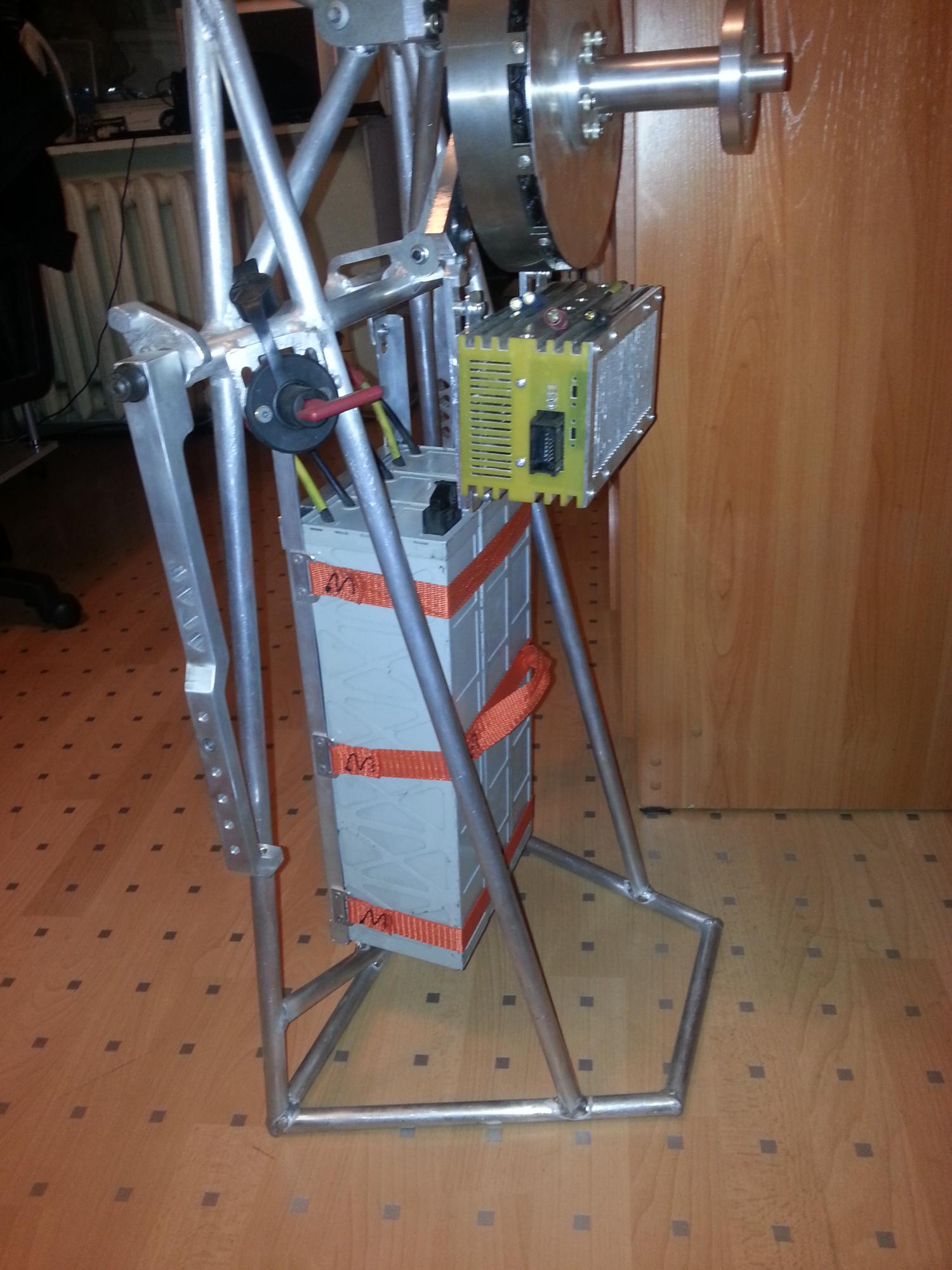
The rest was a matter of technology, welded a light frame, milled propeller. The total weight of the installation is 25 kg, the propeller diameter is 1.25 m.


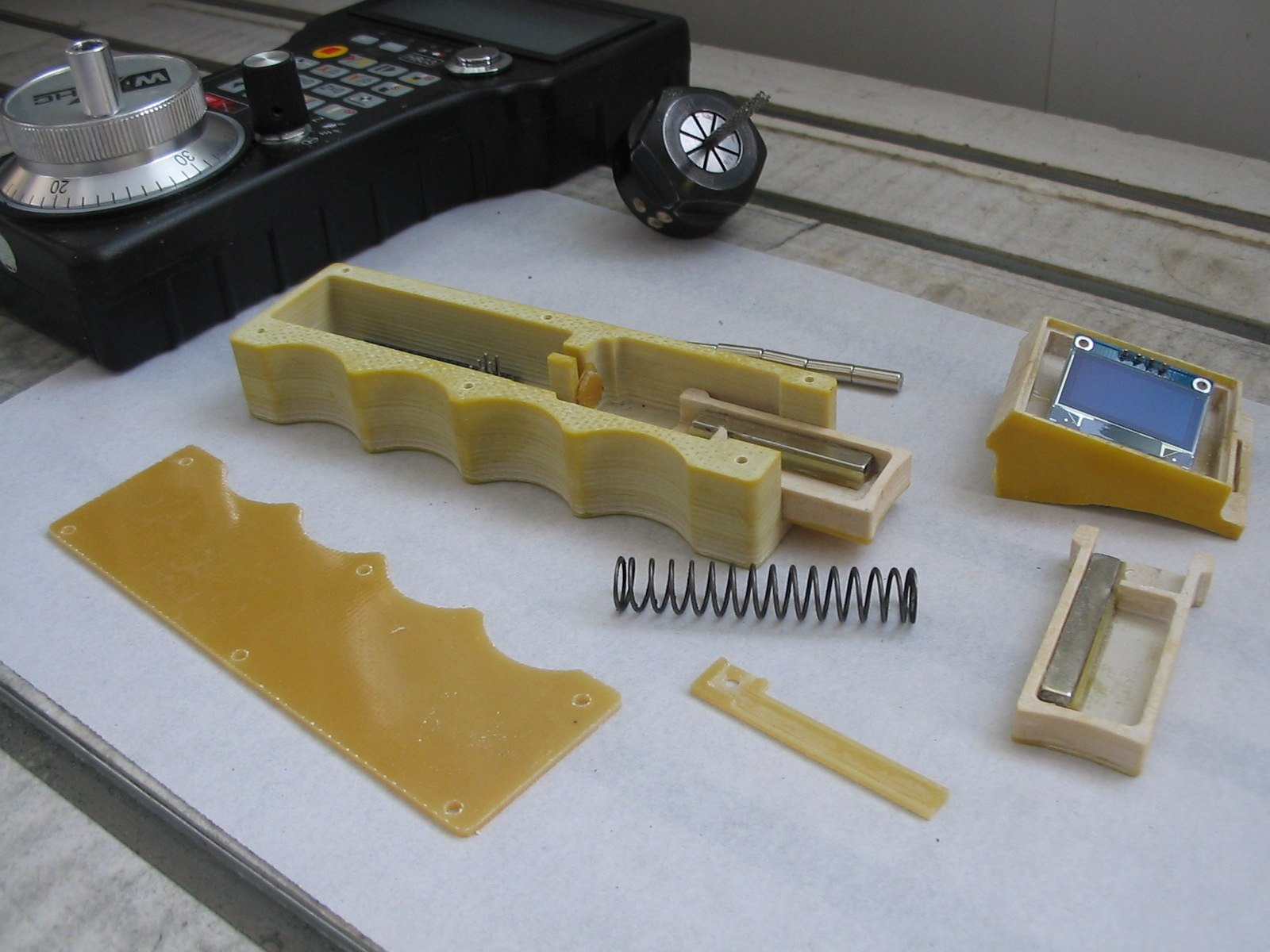
Oh, yes, as a cherry on the cake I made a throttle with CAN communication, it seemed safer and more interesting, since the motor controller allows it.
In late October, I made a couple of battery detentions on the ground, then a test flight. The desired characteristics are generally achieved, by the next summer season I plan to eliminate some little things and then fly around completely, now there is no summer weather.
As such, a knapsack electrical installation is nothing more than a toy compared to gasoline models, less thrust, and most importantly, motor flight time with an acceptable weight, deprive it of its advantages. However, everything will change if you build in the power unit in the harness for a free motorless flight, install a folding propeller without a fence, while keeping within 20 kg by weight.
Many designers went this way, there are some difficulties here, the propeller passed without a fence requires adjustment and control of the tilt of the axis of rotation. Otherwise, unpleasant complications are possible at launch or in flight. I also have some ideas, but have not yet decided whether to move further with them.


The project took two years of leisurely activity in my spare time, thanks to him I mastered CNC and turning, argon welding, updated my knowledge in electric drive, power electronics and many more. Spent time and money is not a pity, I got a lot of creative pleasure.

As for the flights themselves, in two years I pulled up my skills of a free pilot, and now the motor flight is not particularly tempting, unless for a change. Still, a free route flight is something special, especially when it is successful. At these moments, and now even hours, feelings reach higher concentration, the mind processes a lot of information received in real time, experience keeps from unwise actions, and the will forces one to move to new discoveries of this beautiful air space.

All safe flight!
Added video of the second test flight, the pilot weighing 95 kg.
Prehistory
Like most people, since my childhood I was interested in the subject of flight, but it turned out that I took up real flights in the airspace, and not on the simulator or radio-controlled model, not so long ago, in 2014. I chose a paraglider as the most democratic type of aircraft.
At the initial stage of motorless flights, when every minute spent in the air is expensive, you often think about the advantages of motor flight, but you also see the disadvantages - increased noise and vibrations of a primitive two-stroke engine, the smell of fuel during transportation and storage of the installation. And since I had a successful experience of self-electrification of a bicycle, it was decided to do electrical installation.
After thinking about various designs, I stopped at the many-implemented scheme of a gearless propeller drive with an electric motor of large diameter but small thickness.
Flat as a pancake electric motor gives acceptable torque with a small weight, dimensions, and complexity of the design. Greater efficiency can be achieved by applying a compact high-speed electric motor with a gearbox (I was convinced of this on my electric bike), but the complexity of manufacturing such a gearbox, and most importantly its considerable noise, was made to abandon this idea.
Without further ado, based on the pictures and sketches of the famous HPD10 electric motor from the network, I drew my motor in Solid in a few days.
From the progenitor remained unchanged only the profile of the stator plates, which I think the German designers took no changes from the obscure bicycle motor-wheel.
The most important part, the stator magnetic core must be made of a set of plates of special isotropic magnetic steel with a thickness of not more than 0.35 mm. After a long search, in St. Petersburg a company was found ready to fulfill my small order.
The rotor ring is made of a suitable pipe found in scrap metal.
The disk is milled from a D16T plate, the hub is made of thick PCB.
Final winding, the most boring work.
Ready intermediate sample, power 12kW, maximum voltage 100 V.
At the stage of calculating the winding of the motor, I increased the maximum voltage, compared to the prototype twice, to 100v. At that moment I did not think about the pitfalls of this solution, the main plus I saw in a twofold decrease in current, hence the series connection of relatively low-current batteries, connecting wires and connectors of smaller sections.
The reality turned out to be less rosy, the available controllers at that time were with a lower maximum voltage or current, often did not know how to work in a non-sensory mode, or they were indecently expensive.
Well, after thinking, I decided to make the controller myself. Prior to this, from a similar I did only a simple BLDC controller on the AVR, with the firmware of the freaked out part of the apnotes. Therefore, soberly assessing my time and energy, I stopped at a half-open vector projectLebowski controller , author with endless-sphere.com
The author sends out stitched dsPIC30, the rest you have to do yourself. Scaling the recommended output stage circuits, I got what I needed, spending a little money, and burning only one set of power transistors in debugging. The maximum phase current of the controller 200 A, voltage up to 150 V.
The reverse side of the project without source, the inability to upgrade the firmware for themselves, the need to purchase a new firmware controller if you burn the existing one. Rake with a voltage of 100 hit and here, limiting the choice of power transistors.
After the motor and controller, making the battery seemed like a cakewalk, but there were problems here too. Having bought 24 LI-PO IMP3201057P22A cells, I collected three batteries of 8S each, with 200 A continuous currents and 400 A short-term ones.
Everything is good, the batteries are powerful, almost do not heat up to 120 amperes, but the weight collected is almost 15 kg, sad. As a result, the entire unit assembly turned out to weigh 32 kg, heavier than many benzinki. It did not suit me at all. Resolved - the batteries are sold, we are making new batteries.
It was necessary to make a battery with a weight twice as small, and the flight time was about 15 minutes. I stopped at cells 18650 inr18650-25r, which I ordered from the Netherlands and got it safely. Shells made the most light but durable, the cells are connected by soldering, believing that welding with an artisan machine would do more harm than thoughtful soldering.
As a result, I received three 8S6P configuration batteries with a maximum continuous current of 120 A, with a capacity of 15 Ah. The removal of the maximum permissible currents is possible due to the good purging of elements installed with air gaps in the flow from the screw. Pleases the minimum variation of characteristics, after all Samsung. The total weight of the assembly on the bracket is 7800 grams, almost met the planned one.
The rest was a matter of technology, welded a light frame, milled propeller. The total weight of the installation is 25 kg, the propeller diameter is 1.25 m.
Oh, yes, as a cherry on the cake I made a throttle with CAN communication, it seemed safer and more interesting, since the motor controller allows it.
In late October, I made a couple of battery detentions on the ground, then a test flight. The desired characteristics are generally achieved, by the next summer season I plan to eliminate some little things and then fly around completely, now there is no summer weather.
As such, a knapsack electrical installation is nothing more than a toy compared to gasoline models, less thrust, and most importantly, motor flight time with an acceptable weight, deprive it of its advantages. However, everything will change if you build in the power unit in the harness for a free motorless flight, install a folding propeller without a fence, while keeping within 20 kg by weight.
Many designers went this way, there are some difficulties here, the propeller passed without a fence requires adjustment and control of the tilt of the axis of rotation. Otherwise, unpleasant complications are possible at launch or in flight. I also have some ideas, but have not yet decided whether to move further with them.
The project took two years of leisurely activity in my spare time, thanks to him I mastered CNC and turning, argon welding, updated my knowledge in electric drive, power electronics and many more. Spent time and money is not a pity, I got a lot of creative pleasure.
As for the flights themselves, in two years I pulled up my skills of a free pilot, and now the motor flight is not particularly tempting, unless for a change. Still, a free route flight is something special, especially when it is successful. At these moments, and now even hours, feelings reach higher concentration, the mind processes a lot of information received in real time, experience keeps from unwise actions, and the will forces one to move to new discoveries of this beautiful air space.
All safe flight!
Added video of the second test flight, the pilot weighing 95 kg.