Navio - autopilot board for Raspberry Pi
Hi Habr!
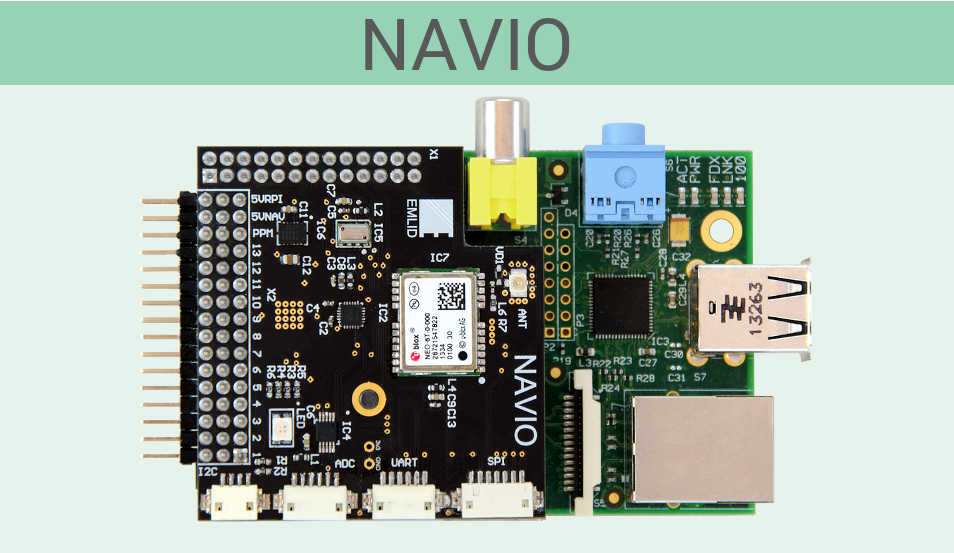
Introducing Navio, the Raspberry Pi expansion board for controlling planes, copters, boats, and other robots. We've already gone from ideas, prototyping and testing to a successful Indiegogo pre-order collection campaign.
Previously, we worked on a commercial autopilot on a microcontroller, and each time adding new functionality, we thought, “But in Linux, you could just connect libxyz for this.” However, at that time there was no convenient hardware platform on which to develop, so we came to the decision to make Navio.
Raspberry was chosen as the most common and inexpensive Linux-based board that has a huge community of users who have made many projects with a detailed description on it. These projects include copters, planes, boats - their creators had to use various shields and breakouts, which ultimately led to work with a huge pile of wires. Navio allows you to get rid of this and is a compact and convenient solution.
Unlike current autopilot platforms on microcontrollers, Raspberry Pi + Navio can be programmed in almost any language, it is easy to connect additional load - you can connect a camera and a WiFi whistle and get FPV out of the box. Also, the Raspberry Pi has great performance, which can come in handy when processing GPS data or when recognizing images.

Aboard board
- U-blox NEO - GPS \ GNSS receiver. Two versions to choose from: multisystem NEO-7M or NEO-6T with the ability to obtain phase measurements for processing.
- MPU9250 - accelerometer, gyroscope, magnetometer for determining orientation.
- MS5611 - pressure sensor for calculating the height, also allows you to measure temperature.
- ADS1115 - 4-channel ADC for measuring battery power and connecting analog sensors.
- PCA9685 is a 16-channel PWM generator for controlling servomotors, 13 channels are routed to standard servos.
- MB85RC - FRAM, non-volatile memory, up to 1 trillion write / erase operations.
- RGB LED - for easy visual display of statuses.
- PPM input - for connecting a receiver that allows you to switch control to manual mode from the remote control.
- DF13 Connectors - Pixhawk-compatible UART, I2C, SPI connectors. Allows you to connect a radio modem, airspeed sensor and much more.
- Also, for those who supported our campaign on Indiegogo, a GPS \ GLONASS antenna and a set of wires with DF13 connectors will be sent complete with the board.

The code
In order to quickly start working with Navio, we have prepared drivers for the sensors and are now working on tutorials that will show how to use them.
Crowdfunding
We decided to carry out a crowdfunding campaign in order to assess the demand for our device and collect the necessary amount for the production of the first large batch of circuit boards at the factory. More information can be found on our page on Indiegogo:
Navio on Indiegogo
Unfortunately, everything is only in English, but I will be happy to answer any questions in the comments or by mail info@emlid.com