Amateur Electronics Lab: From Idea to Finished Machine
Hello, Habr!
I want to share my experience and talk about how I created a test setup, from the study of mechanics and the principle of the operation of electronics to the manufacture of a finished laboratory machine. The feature of the installation is that it is controlled by amateur electronics and is located at the junction of a DIY device and an industrial design.
I studied at the Department of Materials Science in Mechanical Engineering, where new materials and coatings are being developed. As you know, one of the important indicators of the material is its wear resistance. There are a number of GOSTs for various types of tests of wear resistance of materials. One of these GOSTs ( GOST 23.208-79 ) involves testing materials on loosely mounted abrasive particles. Yes, the trouble is: there is a standard, but no one is producing such installations. My task was to create a facility capable of conducting tests according to GOST, plus accelerated tests in the eternal "I need yesterday." I want to tell you about the creation of such a machine ...
Analysis of the functionality and technical study gave birth to the following scheme of the device.
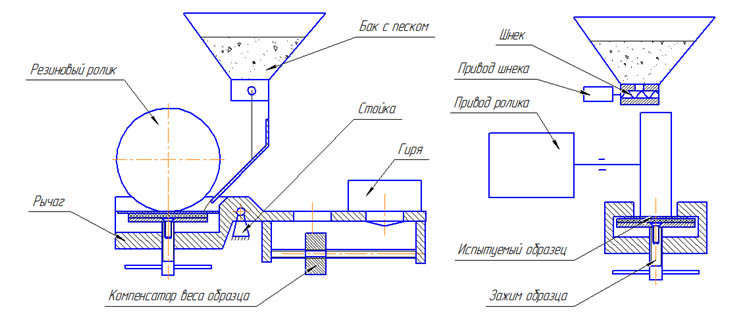
Using the clamp, the test sample is fixed in the lever. Moving the weight compensator on the screw, the lever is set in equilibrium. By installing a calibrated weight in one of the holes of the lever, we press the sample against the roller with a known force. When the screw rotates, sand enters the contact zone of the roller and the sample. The roller starts to rotate and abrades the sample. At the end of the test, the mass loss of the sample is measured. By weight loss, you can judge how much the material is resistant to abrasion. The test procedure is described in detail in GOST 23.208-79 .
The task, from the point of view of electronics, is quite simple - it is necessary to control 2 drives, keep a constant speed of rotation of the roller drive ± 2 rpm, count the number of revolutions of the roller. Upon completion of the set number of cycles (roller revolutions), stop the test. It would also be nice to control the level of sand in the tank. On the part of the managers, many different options for the implementation of plant management were proposed. They all boiled down to something like this:

Image taken from http://electronics-lab.ru
I wanted to make the operator panel at a modern level, with a display, menu, various operating modes and other goodies. The only problem was that I had never worked with microcontrollers, and naturally the department would not have allocated money for the development of the system on the side of the department. In the search for simple and inexpensive solutions, I came across a domestic project Master KIT (by now the company has deactivated its profile from Habr) with many ready-made solutions, lessons, examples, drivers and codes - all that a beginner needs so much. It is worth noting that at that time I did not know about Arduino, otherwise I would have chosen it, as an even simpler and even cheaper solution.
The main system management program will be stored in the BM9300H control modulefrom Master KIT. This module has a BASIC PIC interpreter on board, which makes it possible for noobs, like me, to program the system on an intuitive Basic. Interaction with the system will be carried out through the BM9321 operator panel . The panel has a display and 8 buttons and communicates with the control module via RS485. The stepper motor will rotate the auger, and the motor control module, in turn, will be the control module ШД BM9310 . To combine the modules, you need the BM9399 expansion card .
The rubber roller should rotate at a constant speed, despite the dynamically changing load (due to the heterogeneity of the sand and other factors). In addition, it is necessary to provide a wide speed range from 30 to 240 rpm (for accelerated testing). The following options were considered:
Let's analyze in order:
According to the estimated time, the FL86STH80 engine (then it cost 5,000 rubles) with the OMD-88 driver (4,200 rubles) and the PW4873B power supply unit (2,200 rubles) was selected . The control pulses for OMD-88 will be generated, again, by the BM9307 Kitov extension module with the SD control program loaded on it.
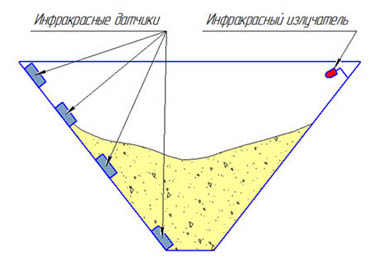
Another interesting task was to provide the operator with information on the amount of sand in the tank. You can, of course, make a transparent tank from plexiglass and make sure that the sand does not end during the test, but this is not our approach. It is necessary to automate the process, in the case of an extremely low level of sand, put the test to a pause. As a result, the following scheme was obtained:
i.e. the principle of operation is extremely simple: if the sensor receives a signal from the emitter, there is no sand at this level. To manage this entire economy, I soldered a separate board - “Sand Sensor Module”.
As a result, we got such a scheme:

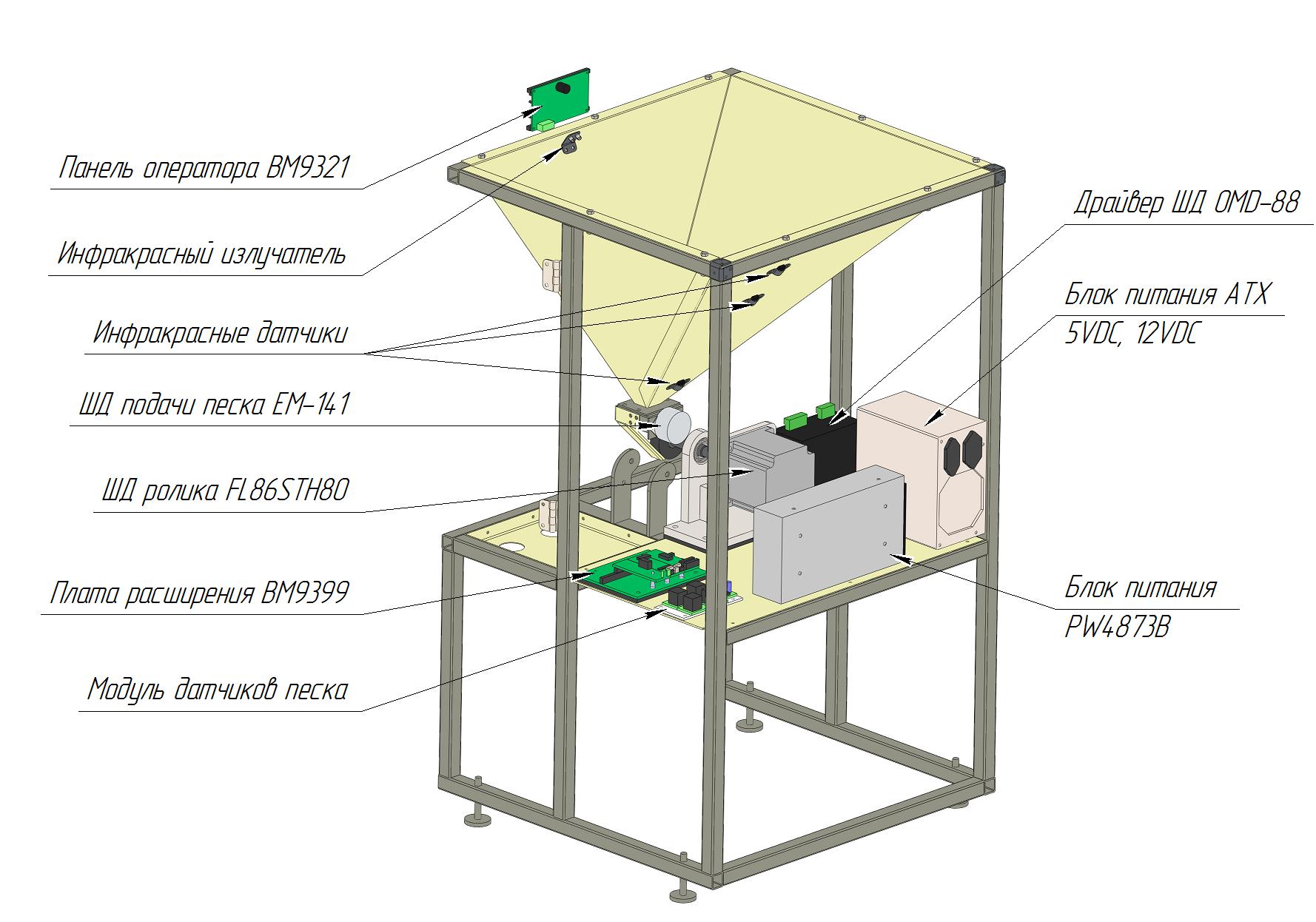
And it will be located in the case like this:
Prototype - a thing necessary in order to identify all possible underwater rakes at an early stage. But what can I say - the scheme may turn out to be generally inoperative. In general, a prototype was assembled from aluminum corners, wooden blocks and handy materials.

I agree, the prototype turned out to be miserable, but it fulfilled its tasks: it revealed many problems and gave invaluable experience. The most important thing at this stage is not to leave things as they are, to gather strength and bring things to mind. So, let's continue ...
The body of the machine is like a woman’s body, this is the first thing that attention is paid to. Therefore, the body should be attractive and charming. Using SolidWorks, I created 2 models, the first designed for the manufacture of plastic or fiberglass cases, the second - for bending steel sheet. For a general idea: the dimensions of the designed machine are 500x500x900 mm.

The first version of the case looks quite aesthetically pleasing, but it will be very expensive to make such panels or in the case of glass fiber manufacture it will be very difficult. The plastic version may be suitable for the production instance, when the cost of the mold is beaten off. Therefore, the steel case clearly wins. Now the market is filled with many companies engaged in laser cutting and sheet bending. Moreover, bending is carried out very accurate and accurate, and most importantly inexpensive (about 20 rubles per bend, depending on sheet thickness, seriality and greed).
For the manufacture of the installation, drawings of all parts and assemblies in SolidWorks were made. The drawings are associative with a 3D model, which greatly simplifies life, i.e. when adjustments are made to the model, and during the development process they are made very often, then the drawings are rebuilt automatically, well, or with minimal modifications. Production of the installation can be divided into the following stages:
After all welding work, assembly, grinding and fine-tuning, the installation was disassembled to a screw and all the parts were given for polymer painting. After which, of course, again collected. As a result, we got such an installation with the clever name of the tribological machine TTM-002. Two - because the second after the prototype.


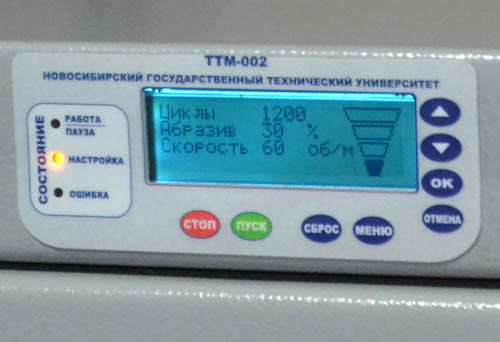
In order not to scroll up, I post the photo of the operator panel again. Before starting work, the operator sets the number of cycles in the test, the speed of rotation of the roller and the feed rate of sand as a percentage of the maximum value. On the right side of the display is an indication of the level of sand. In the menu, you can select various operating modes and change the settings. For example, the “Without sand supply” mode may be needed to run in the roller or the “Without roller rotation” mode to quickly pour off the contents of the tank.
In total, about 45,000 rubles were spent on the installation, of course, not counting my work and the work of my colleagues, who helped me with its manufacture. And a lot was invested. The whole process from the idea to the finished installation took 2 years (2010-2012), but it was with long breaks for several months, plus the last year I worked at the factory, and was engaged in installation after work and on weekends. It is worth noting that each purchase of components is a whole epic, which takes a lot of time and causes a lot of headache (whoever shopped through the university will undoubtedly understand me). The fact is that state institutionsdo not cooperate with e-bay at a 30% prepayment, which even not every Russian company will do. There are, of course, leftist schemespayment options with shipment as if made, but we will not talk about it. Currently, the installation works at the Department of Materials Science in Mechanical Engineering of the Novosibirsk State Technical University, tests nanomaterials, in general, serves the benefit of Russian science.
In order not to turn the article into a three-volume, I did not describe in detail many things. However, I will be happy to answer your questions and add details.
I want to share my experience and talk about how I created a test setup, from the study of mechanics and the principle of the operation of electronics to the manufacture of a finished laboratory machine. The feature of the installation is that it is controlled by amateur electronics and is located at the junction of a DIY device and an industrial design.
I studied at the Department of Materials Science in Mechanical Engineering, where new materials and coatings are being developed. As you know, one of the important indicators of the material is its wear resistance. There are a number of GOSTs for various types of tests of wear resistance of materials. One of these GOSTs ( GOST 23.208-79 ) involves testing materials on loosely mounted abrasive particles. Yes, the trouble is: there is a standard, but no one is producing such installations. My task was to create a facility capable of conducting tests according to GOST, plus accelerated tests in the eternal "I need yesterday." I want to tell you about the creation of such a machine ...
Analysis of the functionality and technical study gave birth to the following scheme of the device.
Using the clamp, the test sample is fixed in the lever. Moving the weight compensator on the screw, the lever is set in equilibrium. By installing a calibrated weight in one of the holes of the lever, we press the sample against the roller with a known force. When the screw rotates, sand enters the contact zone of the roller and the sample. The roller starts to rotate and abrades the sample. At the end of the test, the mass loss of the sample is measured. By weight loss, you can judge how much the material is resistant to abrasion. The test procedure is described in detail in GOST 23.208-79 .
Control electronics
The task, from the point of view of electronics, is quite simple - it is necessary to control 2 drives, keep a constant speed of rotation of the roller drive ± 2 rpm, count the number of revolutions of the roller. Upon completion of the set number of cycles (roller revolutions), stop the test. It would also be nice to control the level of sand in the tank. On the part of the managers, many different options for the implementation of plant management were proposed. They all boiled down to something like this:
Image taken from http://electronics-lab.ru
I wanted to make the operator panel at a modern level, with a display, menu, various operating modes and other goodies. The only problem was that I had never worked with microcontrollers, and naturally the department would not have allocated money for the development of the system on the side of the department. In the search for simple and inexpensive solutions, I came across a domestic project Master KIT (by now the company has deactivated its profile from Habr) with many ready-made solutions, lessons, examples, drivers and codes - all that a beginner needs so much. It is worth noting that at that time I did not know about Arduino, otherwise I would have chosen it, as an even simpler and even cheaper solution.
The main system management program will be stored in the BM9300H control modulefrom Master KIT. This module has a BASIC PIC interpreter on board, which makes it possible for noobs, like me, to program the system on an intuitive Basic. Interaction with the system will be carried out through the BM9321 operator panel . The panel has a display and 8 buttons and communicates with the control module via RS485. The stepper motor will rotate the auger, and the motor control module, in turn, will be the control module ШД BM9310 . To combine the modules, you need the BM9399 expansion card .
Roller drive selection
The rubber roller should rotate at a constant speed, despite the dynamically changing load (due to the heterogeneity of the sand and other factors). In addition, it is necessary to provide a wide speed range from 30 to 240 rpm (for accelerated testing). The following options were considered:
- Asynchronous gear motor with frequency converter.
- DC commutator motor with PWM control and sensor feedback.
- Stepper motor with control unit.
Let's analyze in order:
- An asynchronous gear motor with a chastotnik is a good thing. The frequency converter can maintain a constant rotation speed with current feedback without sensors at the output. However, in our case, the sensor will still be needed to count the number of revolutions. A wide range of speeds is also not a question. Only such an assembly is not cheap, only a 180 W motor gearbox will cost about 15,000 rubles .
- A DC gearmotor will cost about the same as an asynchronous motor. But here you have to work with constant speed support with feedback on the sensor. It is also complicated by the provision of a wide range of speeds.
- A stepper motor will cost less due to the lack of a gear part, and it will perform its functions 100%, eliminating problems with speed control and speed calculation. How many steps you set - how much the motor turned - easy money. The disadvantage of SD in low efficiency, there are also problems with vibration, but they can partially be solved by vibration damping pads. We will stop on a stepper motor.
According to the estimated time, the FL86STH80 engine (then it cost 5,000 rubles) with the OMD-88 driver (4,200 rubles) and the PW4873B power supply unit (2,200 rubles) was selected . The control pulses for OMD-88 will be generated, again, by the BM9307 Kitov extension module with the SD control program loaded on it.
Sand level sensors
Another interesting task was to provide the operator with information on the amount of sand in the tank. You can, of course, make a transparent tank from plexiglass and make sure that the sand does not end during the test, but this is not our approach. It is necessary to automate the process, in the case of an extremely low level of sand, put the test to a pause. As a result, the following scheme was obtained:
i.e. the principle of operation is extremely simple: if the sensor receives a signal from the emitter, there is no sand at this level. To manage this entire economy, I soldered a separate board - “Sand Sensor Module”.
Circuit diagram
As a result, we got such a scheme:
And it will be located in the case like this:
Prototype assembly
Prototype - a thing necessary in order to identify all possible underwater rakes at an early stage. But what can I say - the scheme may turn out to be generally inoperative. In general, a prototype was assembled from aluminum corners, wooden blocks and handy materials.
I agree, the prototype turned out to be miserable, but it fulfilled its tasks: it revealed many problems and gave invaluable experience. The most important thing at this stage is not to leave things as they are, to gather strength and bring things to mind. So, let's continue ...
Chassis Type Selection
The body of the machine is like a woman’s body, this is the first thing that attention is paid to. Therefore, the body should be attractive and charming. Using SolidWorks, I created 2 models, the first designed for the manufacture of plastic or fiberglass cases, the second - for bending steel sheet. For a general idea: the dimensions of the designed machine are 500x500x900 mm.
The first version of the case looks quite aesthetically pleasing, but it will be very expensive to make such panels or in the case of glass fiber manufacture it will be very difficult. The plastic version may be suitable for the production instance, when the cost of the mold is beaten off. Therefore, the steel case clearly wins. Now the market is filled with many companies engaged in laser cutting and sheet bending. Moreover, bending is carried out very accurate and accurate, and most importantly inexpensive (about 20 rubles per bend, depending on sheet thickness, seriality and greed).
Production
For the manufacture of the installation, drawings of all parts and assemblies in SolidWorks were made. The drawings are associative with a 3D model, which greatly simplifies life, i.e. when adjustments are made to the model, and during the development process they are made very often, then the drawings are rebuilt automatically, well, or with minimal modifications. Production of the installation can be divided into the following stages:
- The manufacture of the frame. The frame was made of square steel pipes welded together. Assembling a frame from pipes is quite simple, but this step should not be underestimated. In case of inaccurate dimensions of the frame or its shape, the casing may not fit, the door will not close, the box will not come in and other interesting surprises will come out during assembly. Therefore, the pipes were cut with an allowance, and then milled at the ends to the desired size within a tolerance of ± 0.5 mm, ensuring perpendicularity to the wall.

- Turning and milling parts (engine strut, lever strut, screw housing, shaft, coupling and weights) were made at our own department. The university has all the necessary equipment for such things. Modern machines and people with hands give output of excellent quality parts without the need for a file.
- Sheet parts (case, doors, tank, box for waste sand, lever and various small things like brackets, plates, etc.) are laser-cut and bent to order. Together with the material, these details cost about 5,000 rubles. True, designer feints in the form of roundings with a large radius had to be bent manually. But this is not a complicated matter, a steel sheet 1 mm thick is quite malleable.
- Plexiglass window. Plexiglass had to be bent along the radius so that its shape coincided with the shape of the door. Plexiglass was also a very pliable material as soon as an industrial hair dryer came to the rescue.
- The false panel is a sticker with transparent windows for the display and LEDs. The sticker was also made to order, for this it was necessary to draw it in a vector and pay only 977 rubles. for 5 stickers. Although there was only one sticker needed, the price difference for 1 and 5 pieces was very slight. Just in case, I ordered 5.
Total
After all welding work, assembly, grinding and fine-tuning, the installation was disassembled to a screw and all the parts were given for polymer painting. After which, of course, again collected. As a result, we got such an installation with the clever name of the tribological machine TTM-002. Two - because the second after the prototype.
In order not to scroll up, I post the photo of the operator panel again. Before starting work, the operator sets the number of cycles in the test, the speed of rotation of the roller and the feed rate of sand as a percentage of the maximum value. On the right side of the display is an indication of the level of sand. In the menu, you can select various operating modes and change the settings. For example, the “Without sand supply” mode may be needed to run in the roller or the “Without roller rotation” mode to quickly pour off the contents of the tank.
In total, about 45,000 rubles were spent on the installation, of course, not counting my work and the work of my colleagues, who helped me with its manufacture. And a lot was invested. The whole process from the idea to the finished installation took 2 years (2010-2012), but it was with long breaks for several months, plus the last year I worked at the factory, and was engaged in installation after work and on weekends. It is worth noting that each purchase of components is a whole epic, which takes a lot of time and causes a lot of headache (whoever shopped through the university will undoubtedly understand me). The fact is that state institutions
In order not to turn the article into a three-volume, I did not describe in detail many things. However, I will be happy to answer your questions and add details.