A little more about SDH and PDH
After listening to the second issue of the LinkMiAp podcast published on habrahabr.ru , I had a desire to supplement and slightly correct what was said in the first part of the issue devoted to SDH / PDH. But since all my thoughts did not fit into the framework of the usual commentary, I took advantage of the May holidays to write this post.
The Kotelnikov theorem (Nyquist – Shannon theorem) answers the question: - How often do I need to take readings from an analog signal in order to be able to reconstruct it from these readings?
An analog signal has such a property as a spectrum (the frequency range in which the signal is located), for example, an average statistical person hears sound in the range from 20 Hz to 20 kHz. In order to digitize the entire human-readable spectrum of sound without loss, according to Kotelnikov’s theorem, the signal level must be measured with a frequency two times higher than the upper frequency of the spectrum , i.e. 40 kHz. Digitizing the entire audible spectrum naturally is a great luxury,
Even in the era of analog systems with frequency channel multiplexing, it turned out that in order to maintain intelligibility of speech, it is enough to leave the range from 300 Hz to 3400 Hz from the audio signal (standard PM channel ). Moreover, the spectrum can be cut even more, but although a person can understand speech, it will not be possible to recognize the speaker’s voice. Thus, developers of systems with frequency channel multiplexing laid out the channels in frequency, allocating each channel with a range of 4 kHz to provide a protective interval between the channels. So the first channel in the K-60 systems was located in the range of 252-248 kHz, the second channel in the range of 248-244 kHz and so on up to 12 kHz. Modern DWDM systems operate on the same principle, but with an optical signal.
The developers of digital systems also decided to use channels with a width of 4 kHz for compatibility with existing at that time analog compression systems. Well, according to Kotelnikov’s theorem, such a signal must be read with a frequency of 8 kHz.
The signal level is encoded with an eight-bit code, and quantization does not occur evenly, but the lower the level, the more accurately the signal is measured, since the human ear better distinguishes the same difference between two small levels than between two large ones.
To betray 8 bits with a frequency of 8000 Hz, you need a speed of 8000x8 = 64000 bit / s - this will be the Main Digital Channel (BCC) . 32 of these channels form a stream E1.
In addition to E1, it is rather difficult to meet other levels of the plesochron hierarchy in Russia today. An exception may be the sometimes encountered optical modems for four or eight E1 streams, which I have inside, E2 or STM-1, I do not know. But these modems, as a rule, are put in pairs and work with each other without settings requiring high knowledge.
If we imagine the transmission system as a kind of conveyor, on which one worker puts boxes of books on one end, and the second worker removes these boxes on the other end. That in order for there to be no congestion or downtime, these workers must work synchronously, that is, remove and put the boxes at the same speed, and this requirement is fulfilled in PDH systems. But the authorities decided to increase the productivity of the conveyor and increased its speed by four times, this does not affect the work of these two workers, since the boxes from the conveyor must be removed at the same speed with which they are put there, but now there is free space on the conveyor. And the authorities put three more workers at the beginning of the assembly line and three at the end. Each of the four workers at loading must work simultaneously with their partner at unloading, and again there is no problem with this. But besides this, the workers should not interfere with each other during loading, they should put the boxes at the same speed, that is, synchronously, and this is the problem with PDH systems. This problem is solved by allocating additional space on the conveyor, the conveyor moves a little faster than necessary, and each worker on loading has the opportunity to work without adjusting much to the rest of the workers who put the boxes on the conveyor.
As a result, it is impossible to grab one book from the box in the middle of the conveyor or put the book in the box at a specific place, since it is impossible to determine where this place is at a particular moment in time, eight more workers must be placed so that they remove the boxes, remove a book from one put this book in an empty place, and then returned the boxes to their place.
Another problem with PDH systems was the incompatibility of hierarchies developed in the USA, Japan, and Europe. But during the development of next-generation systems (SDH), we managed to get rid of these shortcomings, and how to get started we increased the speed.
In addition to the zero time slot (T0) in the cycle, there is another service channel, usually it is located on the 16th place (T16), a little less often on the last 31st (T31), some equipment allows you to put it in general to any place, for example, equipment SHDSL can cut the cycle (reduce the transmission speed, reducing the number of transmitted time slots) depending on the cable parameters and in order not to cut the service time slot, it is transferred to the beginning of the cycle. At this time slot, “Control and Interaction Signals” (SUV) are transmitted, in other words, the channel exchanges service information between the PBX (DSS1, OKS7 protocols, etc.), and some manufacturers also use this channel to remotely monitor PDH multiplexers.
It is easiest to explain how super-cycle synchronization works using the 2BCK (2 Dedicated Signal Channels) signaling as an example, at the moment it is quite outdated and it is quite difficult to find it in real life, but it is quite simple.
16 cycles (frames) in a row form a supercycle (multi frame).
In the 16th time slot of the 1st cycle (non-zero), the first four bits transmit signal information (channel occupation, hang up, dialing) for the 1st time slot of the cycle. In the second four bits, signaling information for the 17th time slot.
In the 16th time slot of the 2nd cycle, the first four bits transmit signal information for the 2nd time slot of the cycle, in the second four bits the signal information for the 18th time slot and so on.

The picture shows the 10th cycle of the supercycle, therefore, bits B0-B3 contain signaling information for the 10th time slot, and bits B4-B7 for the 26th time slot.
The 16th time slot of the 0th cycle contains information for providing super-cycle synchronization, similar to how the information on cyclic synchronization is transmitted to T0.
When the IP network is working on top of the E1 stream, the IP packet headers are not transferred to a separate time slot, but are transmitted along with useful information, therefore, the E1 unstructured stream is used for data transfer: without super-cycle synchronization, without an alarm time slot, and a 31 time slot is allocated for the payload instead of 30.
But the transmission system, through which the E1 stream is transmitted, may try to track the presence of super-cycle synchronization and issue an alarm message, in this case, the super-cycle control can simply be turned off.
There is, but only for the equipment control system, these addresses do not affect the payload in any way.
Each multiplexer has a special cross-connection table, which indicates which VC container or time slot is connected to which port or how transit is carried out.

Remote control and monitoring is organized on a separate channel, in SDH systems these are D bytes (Data Communication Channel - DCC), in PDH systems this channel was not originally provided, therefore manufacturers usually use the 16th time slot of the E1 stream. This separation has a number of advantages: firstly, it is enough to disable the control channel at the junctions with other operators or customers and the control system will be completely inaccessible from outside; secondly, in case of equipment reboot for any reason, communication is restored even before the multiplexer is fully loaded, since the equipment brains and the module responsible for switching are independent of each other.
Addressing within the control channel can be very different, each manufacturer implements a control system in its own way, including, you can see the IP network on top of DCC. Such a zoo of implementations is another reason to disable D bytes in the headers at the interfaces of equipment from different manufacturers, since incomprehensible information on the control channel can enter the equipment into a stupor.
Here it is worth mentioning the attempt to standardize the communication network management system - Telecommunication Management Network (TMN) , but this standard has the same relation to real life as the 7-level network model OSI.
In most applications, PDH and SDH systems are used to organize point-to-point connections, but many equipment operating at the PDH level can organize so-called group channels. In essence, this is a regular, regular, conference, that is, a simple addition of information from several channels. But there is one problem to add information, equipment needs to know what type of information is being added, most of the equipment can add voice from different channels, but there are problems with something more exotic, for example RS-485.
When combining STM-1 into STM-4, the usual multiplexing of STM-1 bytes occurs as shown in the figure, while the distance between the bytes of the same STM-1 remains the same.

In the first version, information transfer is organized in two directions at once, at the receiving end the equipment receives information from the main direction, and in the event of an accident, the main from the backup. Such a switching scheme can be organized at the level of both virtual containers (VC) and at the level of the entire path.
Some manufacturers implement this type of backup even at the individual time slot (BCC) level, but since the BCC is not able to report a channel accident, this information is taken from the next level. That is, in case of an E1 stream accident, you can switch to the backup direction only one time slot from this stream.
In the second case, a ring is organized, each multiplexer transmits and receives in two directions. In the ring, a node is selected that acts as a ring controller - this is a network element that, by default, breaks the ring, thereby eliminating signal inversion (returning the signal back along the ring). The ring controller sends a special signal to one side on the service channel and waits for it on the other side, if the signal does not return, the controller closes the ring through itself.
Switchover time to the reserve is a split second. If you know that the switching will happen now and specifically listen to the voice of the speaker on the other end, then you can not hear a big click, but if the subscriber does not know what is happening on the network, then most likely he will not notice anything.
It should be noted here that in the event of a power outage, some manufacturers implement electrical transit of signals between the equipment outputs in pairs. For example: there is a multiplexer with four outputs E1 (1E1, 2E1, 3E1, 4E1), in case of power failure, the multiplexer with relay contacts closes the flows in pairs connected to the outputs 1E1-2E1 and 3E1-4E1. In this way, the multiplexer can maintain ring integrity even in the event of a power failure.
Well, in the first place, packet-switched networks have not yet won. At the moment, equipment with dynamic circuit switching (ATS) is actively being replaced by equipment with packet switching. But on the highways, equipment with static circuit switching reigns and taking into account the advantages that will be described below, it will be very difficult to squeeze them out of packet switched networks, at least in their current implementation.
If you imagine packet-switched networks as a highway, where the traffic controller is standing at the crossroads and indicates who needs to go on the basis of the packet header, or if the traffic controller is absent, copies of the cars are created, which drive off in all directions at once. That circuit-switched network will be similar to a network of pipelines connecting, as a rule, no more than two subscribers.
From here you can understand the main disadvantages of a circuit-switched network: if the pipeline is not currently used by the subscriber, then no one else can use the idle pipe; dynamic change of pipe diameter is also not possible; Yes, and pipes are only certain standard diameters.
All of the above is simultaneously an advantage of circuit-switched networks: no one can get into your pipe, not to eavesdrop on your traffic, or to clog your pipe with your traffic, that is, you always have a guaranteed and protected bandwidth regardless of other clients connected to the same equipment without any add-ons (lanes for public transport - VLAN); there are no intersections on pipes - all traffic multiplexers and regenerators look like pumping stations, and at intersections, unlike pumping stations, even if there are no traffic jams, there is still a delay for header analysis, in circuit-switched systems there is no need to analyze the header to find out where to send information, this is already known in advance.
Also, circuit-switched equipment that processes the same amount of traffic is simpler in its device and therefore more reliable: the logic of the switch is designed so that no traffic can lead to multiplexer overload. Well, as mentioned above, the switching speed of equipment with circuit switched channels to the reserve is much higher.
The only significant drawback of multiplexers at the moment is the price. The manufacturers of this equipment are focused on large players in the telecommunications market, for whom the cost of equipment is not the most important parameter.
As a rule, in all optical equipment, for the safety of service personnel, manufacturers implement the automatic laser blanking function. If the optical signal at the input disappears, the multiplexer turns off the optical output signal (laser), and periodically (usually once a minute) turns it on to check if the line has been restored.
Therefore, if you accidentally looked into the output of the multiplexer, and this did not affect your vision in any way, you should not look there a second time.
If a break in communication an extra minute is a lot for the operator, but for SDH systems it is really a lot, then this function is disabled.
About Kotelnikov's theorem
The Kotelnikov theorem (Nyquist – Shannon theorem) answers the question: - How often do I need to take readings from an analog signal in order to be able to reconstruct it from these readings?
An analog signal has such a property as a spectrum (the frequency range in which the signal is located), for example, an average statistical person hears sound in the range from 20 Hz to 20 kHz. In order to digitize the entire human-readable spectrum of sound without loss, according to Kotelnikov’s theorem, the signal level must be measured with a frequency two times higher than the upper frequency of the spectrum , i.e. 40 kHz. Digitizing the entire audible spectrum naturally is a great luxury,
Even in the era of analog systems with frequency channel multiplexing, it turned out that in order to maintain intelligibility of speech, it is enough to leave the range from 300 Hz to 3400 Hz from the audio signal (standard PM channel ). Moreover, the spectrum can be cut even more, but although a person can understand speech, it will not be possible to recognize the speaker’s voice. Thus, developers of systems with frequency channel multiplexing laid out the channels in frequency, allocating each channel with a range of 4 kHz to provide a protective interval between the channels. So the first channel in the K-60 systems was located in the range of 252-248 kHz, the second channel in the range of 248-244 kHz and so on up to 12 kHz. Modern DWDM systems operate on the same principle, but with an optical signal.
The developers of digital systems also decided to use channels with a width of 4 kHz for compatibility with existing at that time analog compression systems. Well, according to Kotelnikov’s theorem, such a signal must be read with a frequency of 8 kHz.
The signal level is encoded with an eight-bit code, and quantization does not occur evenly, but the lower the level, the more accurately the signal is measured, since the human ear better distinguishes the same difference between two small levels than between two large ones.
To betray 8 bits with a frequency of 8000 Hz, you need a speed of 8000x8 = 64000 bit / s - this will be the Main Digital Channel (BCC) . 32 of these channels form a stream E1.
In addition to E1, it is rather difficult to meet other levels of the plesochron hierarchy in Russia today. An exception may be the sometimes encountered optical modems for four or eight E1 streams, which I have inside, E2 or STM-1, I do not know. But these modems, as a rule, are put in pairs and work with each other without settings requiring high knowledge.
Why are PDH (PDI) systems called plesiochronous (almost synchronous)?
If we imagine the transmission system as a kind of conveyor, on which one worker puts boxes of books on one end, and the second worker removes these boxes on the other end. That in order for there to be no congestion or downtime, these workers must work synchronously, that is, remove and put the boxes at the same speed, and this requirement is fulfilled in PDH systems. But the authorities decided to increase the productivity of the conveyor and increased its speed by four times, this does not affect the work of these two workers, since the boxes from the conveyor must be removed at the same speed with which they are put there, but now there is free space on the conveyor. And the authorities put three more workers at the beginning of the assembly line and three at the end. Each of the four workers at loading must work simultaneously with their partner at unloading, and again there is no problem with this. But besides this, the workers should not interfere with each other during loading, they should put the boxes at the same speed, that is, synchronously, and this is the problem with PDH systems. This problem is solved by allocating additional space on the conveyor, the conveyor moves a little faster than necessary, and each worker on loading has the opportunity to work without adjusting much to the rest of the workers who put the boxes on the conveyor.
As a result, it is impossible to grab one book from the box in the middle of the conveyor or put the book in the box at a specific place, since it is impossible to determine where this place is at a particular moment in time, eight more workers must be placed so that they remove the boxes, remove a book from one put this book in an empty place, and then returned the boxes to their place.
Another problem with PDH systems was the incompatibility of hierarchies developed in the USA, Japan, and Europe. But during the development of next-generation systems (SDH), we managed to get rid of these shortcomings, and how to get started we increased the speed.
Why does the transmission system issue a super-cycle synchronization alarm if IP packets are sent on the E1 stream.
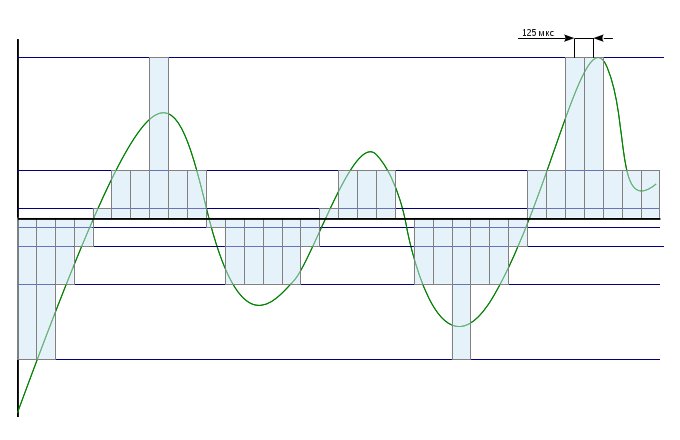
In addition to the zero time slot (T0) in the cycle, there is another service channel, usually it is located on the 16th place (T16), a little less often on the last 31st (T31), some equipment allows you to put it in general to any place, for example, equipment SHDSL can cut the cycle (reduce the transmission speed, reducing the number of transmitted time slots) depending on the cable parameters and in order not to cut the service time slot, it is transferred to the beginning of the cycle. At this time slot, “Control and Interaction Signals” (SUV) are transmitted, in other words, the channel exchanges service information between the PBX (DSS1, OKS7 protocols, etc.), and some manufacturers also use this channel to remotely monitor PDH multiplexers.
It is easiest to explain how super-cycle synchronization works using the 2BCK (2 Dedicated Signal Channels) signaling as an example, at the moment it is quite outdated and it is quite difficult to find it in real life, but it is quite simple.
16 cycles (frames) in a row form a supercycle (multi frame).
In the 16th time slot of the 1st cycle (non-zero), the first four bits transmit signal information (channel occupation, hang up, dialing) for the 1st time slot of the cycle. In the second four bits, signaling information for the 17th time slot.
In the 16th time slot of the 2nd cycle, the first four bits transmit signal information for the 2nd time slot of the cycle, in the second four bits the signal information for the 18th time slot and so on.
The picture shows the 10th cycle of the supercycle, therefore, bits B0-B3 contain signaling information for the 10th time slot, and bits B4-B7 for the 26th time slot.
The 16th time slot of the 0th cycle contains information for providing super-cycle synchronization, similar to how the information on cyclic synchronization is transmitted to T0.
When the IP network is working on top of the E1 stream, the IP packet headers are not transferred to a separate time slot, but are transmitted along with useful information, therefore, the E1 unstructured stream is used for data transfer: without super-cycle synchronization, without an alarm time slot, and a 31 time slot is allocated for the payload instead of 30.
But the transmission system, through which the E1 stream is transmitted, may try to track the presence of super-cycle synchronization and issue an alarm message, in this case, the super-cycle control can simply be turned off.
Does the equipment have PDH and SDH addresses?
There is, but only for the equipment control system, these addresses do not affect the payload in any way.
Each multiplexer has a special cross-connection table, which indicates which VC container or time slot is connected to which port or how transit is carried out.
Remote control and monitoring is organized on a separate channel, in SDH systems these are D bytes (Data Communication Channel - DCC), in PDH systems this channel was not originally provided, therefore manufacturers usually use the 16th time slot of the E1 stream. This separation has a number of advantages: firstly, it is enough to disable the control channel at the junctions with other operators or customers and the control system will be completely inaccessible from outside; secondly, in case of equipment reboot for any reason, communication is restored even before the multiplexer is fully loaded, since the equipment brains and the module responsible for switching are independent of each other.
Addressing within the control channel can be very different, each manufacturer implements a control system in its own way, including, you can see the IP network on top of DCC. Such a zoo of implementations is another reason to disable D bytes in the headers at the interfaces of equipment from different manufacturers, since incomprehensible information on the control channel can enter the equipment into a stupor.
Here it is worth mentioning the attempt to standardize the communication network management system - Telecommunication Management Network (TMN) , but this standard has the same relation to real life as the 7-level network model OSI.
Can PDH and SDH systems only organize point-to-point channels?
In most applications, PDH and SDH systems are used to organize point-to-point connections, but many equipment operating at the PDH level can organize so-called group channels. In essence, this is a regular, regular, conference, that is, a simple addition of information from several channels. But there is one problem to add information, equipment needs to know what type of information is being added, most of the equipment can add voice from different channels, but there are problems with something more exotic, for example RS-485.
How do four STM-1s merge into one STM-4?
When combining STM-1 into STM-4, the usual multiplexing of STM-1 bytes occurs as shown in the figure, while the distance between the bytes of the same STM-1 remains the same.
How does redundancy work on PDH and SDH systems?
In the first version, information transfer is organized in two directions at once, at the receiving end the equipment receives information from the main direction, and in the event of an accident, the main from the backup. Such a switching scheme can be organized at the level of both virtual containers (VC) and at the level of the entire path.
Some manufacturers implement this type of backup even at the individual time slot (BCC) level, but since the BCC is not able to report a channel accident, this information is taken from the next level. That is, in case of an E1 stream accident, you can switch to the backup direction only one time slot from this stream.
In the second case, a ring is organized, each multiplexer transmits and receives in two directions. In the ring, a node is selected that acts as a ring controller - this is a network element that, by default, breaks the ring, thereby eliminating signal inversion (returning the signal back along the ring). The ring controller sends a special signal to one side on the service channel and waits for it on the other side, if the signal does not return, the controller closes the ring through itself.
Switchover time to the reserve is a split second. If you know that the switching will happen now and specifically listen to the voice of the speaker on the other end, then you can not hear a big click, but if the subscriber does not know what is happening on the network, then most likely he will not notice anything.
It should be noted here that in the event of a power outage, some manufacturers implement electrical transit of signals between the equipment outputs in pairs. For example: there is a multiplexer with four outputs E1 (1E1, 2E1, 3E1, 4E1), in case of power failure, the multiplexer with relay contacts closes the flows in pairs connected to the outputs 1E1-2E1 and 3E1-4E1. In this way, the multiplexer can maintain ring integrity even in the event of a power failure.
Why is everything that is described above necessary in the age of victory of networks with packet switching?
Well, in the first place, packet-switched networks have not yet won. At the moment, equipment with dynamic circuit switching (ATS) is actively being replaced by equipment with packet switching. But on the highways, equipment with static circuit switching reigns and taking into account the advantages that will be described below, it will be very difficult to squeeze them out of packet switched networks, at least in their current implementation.
If you imagine packet-switched networks as a highway, where the traffic controller is standing at the crossroads and indicates who needs to go on the basis of the packet header, or if the traffic controller is absent, copies of the cars are created, which drive off in all directions at once. That circuit-switched network will be similar to a network of pipelines connecting, as a rule, no more than two subscribers.
From here you can understand the main disadvantages of a circuit-switched network: if the pipeline is not currently used by the subscriber, then no one else can use the idle pipe; dynamic change of pipe diameter is also not possible; Yes, and pipes are only certain standard diameters.
All of the above is simultaneously an advantage of circuit-switched networks: no one can get into your pipe, not to eavesdrop on your traffic, or to clog your pipe with your traffic, that is, you always have a guaranteed and protected bandwidth regardless of other clients connected to the same equipment without any add-ons (lanes for public transport - VLAN); there are no intersections on pipes - all traffic multiplexers and regenerators look like pumping stations, and at intersections, unlike pumping stations, even if there are no traffic jams, there is still a delay for header analysis, in circuit-switched systems there is no need to analyze the header to find out where to send information, this is already known in advance.
Also, circuit-switched equipment that processes the same amount of traffic is simpler in its device and therefore more reliable: the logic of the switch is designed so that no traffic can lead to multiplexer overload. Well, as mentioned above, the switching speed of equipment with circuit switched channels to the reserve is much higher.
The only significant drawback of multiplexers at the moment is the price. The manufacturers of this equipment are focused on large players in the telecommunications market, for whom the cost of equipment is not the most important parameter.
And in conclusion about eyes and lasers.
As a rule, in all optical equipment, for the safety of service personnel, manufacturers implement the automatic laser blanking function. If the optical signal at the input disappears, the multiplexer turns off the optical output signal (laser), and periodically (usually once a minute) turns it on to check if the line has been restored.
Therefore, if you accidentally looked into the output of the multiplexer, and this did not affect your vision in any way, you should not look there a second time.
If a break in communication an extra minute is a lot for the operator, but for SDH systems it is really a lot, then this function is disabled.