Julia, Gradient descent and simplex method
- Tutorial
We continue our acquaintance with the methods of multidimensional optimization.
Further, the implementation of the method of fastest descent with the analysis of the speed of execution, as well as the implementation of the Nelder-Mead method by means of the Julia and C ++ language, is proposed.
Gradient descent method
The search for extremum is conducted in steps in the direction of the gradient (max) or anti-gradient (min). At each step in the direction of the gradient (antigradient), the movement is carried out as long as the function increases (decreases).
Follow the theory to follow the links:
- Gradient descent
- Conjugate Gradient Method
- Nelder-Mead Method
- Gradient Method Overview
- SciPy Optimization
- Overview of the main mathematical optimization methods for problems with constraints
- Nelder-Mead optimization method. Python implementation
- Zaitsev V.V. Numerical methods for physicists. Nonlinear equations and optimization
As a basis, examples from the last source were used.
The model function will choose an elliptical paraboloid and set the relief drawing function:
using Plots
plotly() # интерактивные графики
function plotter(plot_fun; low, up)
Xs = range(low[1], stop = up[1], length = 80)
Ys = range(low[2], stop = up[2], length = 80)
Zs = [ fun([x y]) for x in Xs, y in Ys ];
plot_fun(Xs, Ys, Zs)
xaxis!( (low[1], up[1]), low[1]:(up[1]-low[1])/5:up[1] ) # линовка осей
yaxis!( (low[2], up[2]), low[2]:(up[2]-low[2])/5:up[2] )
end
parabol(x) = sum(u->u*u, x) # сумма квадратов
fun = parabol
plotter(surface, low = [-1-1], up = [11])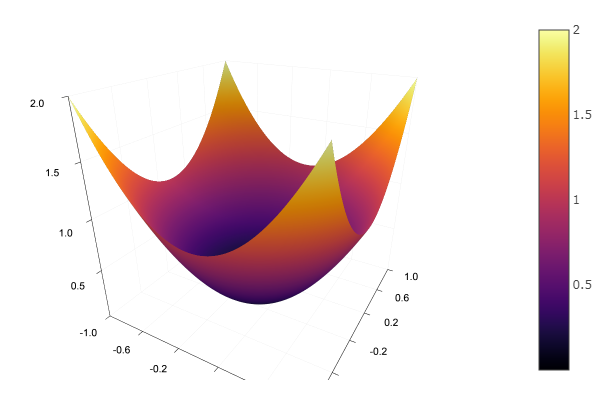
Let us set a function implementing the method of steepest descent, which takes the dimension of the problem, the accuracy, the step length, the initial approximation, and the size of the bounding box:
# точка-с-запятой значит, что все последующие параметры - ключевые слова
function ofGradient(; ndimes = 2, ε = 1e-4, st = 0.9, fit = [9.9, 9.9], low = [-1-1], up = [1010])
k = 0while st > ε
g = grad(fit, 0.01)
fung = fun(fit)
fit -= st*g
if fun(fit) >= fung
st *= 0.5
fit += st*g
end
k += 1#println(k, " ", fit)
end
#println(fun(fit))
endOn the function of calculating the direction of the gradient can be sharpened in terms of optimization.
The first thing that comes to mind is actions with matrices:
# \delta - приращение аргумента используемое для вычисления# производных по формуле центральных разностей
function grad(fit, δ)
ndimes = length(fit)
Δ = zeros(ndimes, ndimes)
for i = 1:ndimes
Δ[i,i] = δ
end
fr = [ fun( fit + Δ[:,i] ) for i=1:ndimes]
fl = [ fun( fit - Δ[:,i] ) for i=1:ndimes]
g = 0.5(fr - fl)/δ
modg = sqrt( sum(x -> x*x, g) )
g /= modg
endWhat makes Julia really good is that problem areas can be easily tested:
#]add BenchmarkTools
using BenchmarkTools
@benchmark ofGradient()
BenchmarkTools.Trial:
memory estimate: 44.14 KiB
allocs estimate: 738
--------------
minimum time: 76.973 μs (0.00% GC)
median time: 81.315 μs (0.00% GC)
mean time: 92.828 μs (9.14% GC)
maximum time: 5.072 ms (94.37% GC)
--------------
samples: 10000
evals/sample: 1You can rush to reprint everything in Cishny style
function grad(fit::Array{Float64,1}, δ::Float64)
ndimes::Int8 = 2
g = zeros(ndimes)
modg::Float64 = 0.
Fr::Float64 = 0.
Fl::Float64 = 0.for i = 1:ndimes
fit[i] += δ
Fr = fun(fit)
fit[i] -= 2δ
Fl = fun(fit)
fit[i] += δ
g[i] = 0.5(Fr - Fl)/δ
modg += g[i]*g[i]
end
modg = sqrt( modg )
g /= modg
end
@benchmark ofGradient()
BenchmarkTools.Trial:
memory estimate: 14.06 KiB
allocs estimate: 325
--------------
minimum time: 29.210 μs (0.00% GC)
median time: 30.395 μs (0.00% GC)
mean time: 33.603 μs (6.88% GC)
maximum time: 4.287 ms (98.88% GC)
--------------
samples: 10000
evals/sample: 1But as it turns out, it itself and without us knows which types should be put, so we arrive at a compromise:
function grad(fit, δ) # вычисляет направление градиента
ndimes = length(fit)
g = zeros(ndimes)
for i = 1:ndimes
fit[i] += δ
Fr = fun(fit)
fit[i] -= δ
fit[i] -= δ
Fl = fun(fit)
fit[i] += δ
g[i] = 0.5(Fr - Fl)/δ
end
modg = sqrt( sum(x -> x*x, g) )
g /= modg
end
@benchmark ofGradient()
BenchmarkTools.Trial:
memory estimate: 15.38 KiB
allocs estimate: 409
--------------
minimum time: 28.026 μs (0.00% GC)
median time: 30.394 μs (0.00% GC)
mean time: 33.724 μs (6.29% GC)
maximum time: 3.736 ms (98.72% GC)
--------------
samples: 10000
evals/sample: 1And now let him draw:
function ofGradient(; ndimes = 2, ε = 1e-4, st = 0.9, fit = [9.9, 9.9], low = [-1-1], up = [1010])
k = 0
x = []
y = []
push!(x, fit[1])
push!(y, fit[2])
plotter(contour, low = low, up = up)
while st > ε
g = grad(fit, 0.01)
fung = fun(fit)
fit -= st*g
if fun(fit) >= fung
st *= 0.5
fit += st*g
end
k += 1#println(k, " ", fit)
push!(x, fit[1])
push!(y, fit[2])
end
plot!(x, y, w = 3, legend = false, marker = :rect )
title!("Age = $k f(x,y) = $(fun(fit))")
println(fun(fit))
end
ofGradient()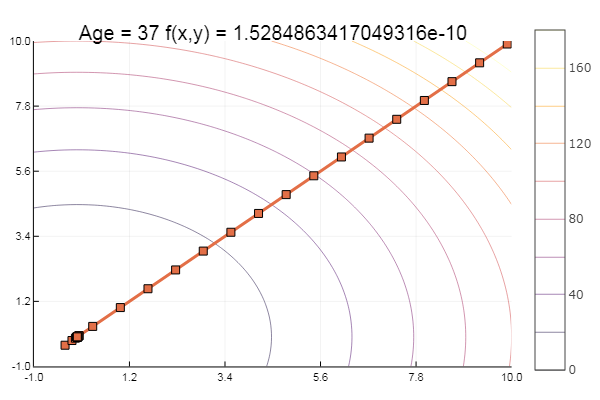
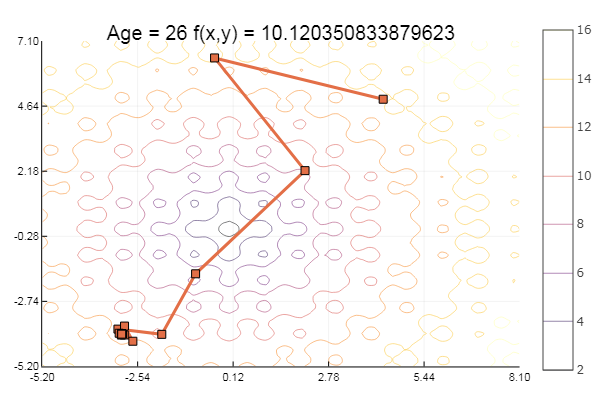
And now let's test on Ackley's functions:
ekly(x) = -20exp(-0.2sqrt(0.5(x[1]*x[1]+x[2]*x[2]))) - exp(0.5(cospi(2x[1])+cospi(2x[2]))) + 20 + ℯ
# f(0,0) = 0, x_i ∈ [-5,5]
fun = ekly
ofGradient(fit = [4.3, 4.9], st = 0.1, low = [34.5], up = [4.55.4] )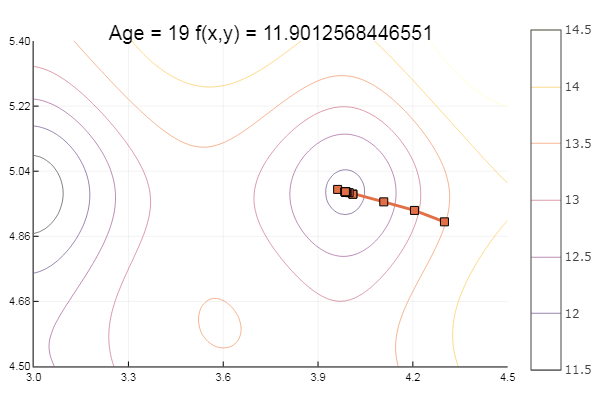
Dropped to a local minimum. Let's take more steps:
ofGradient(fit = [4.3, 4.9], st = 0.9, low = [34.5], up = [4.55.4] )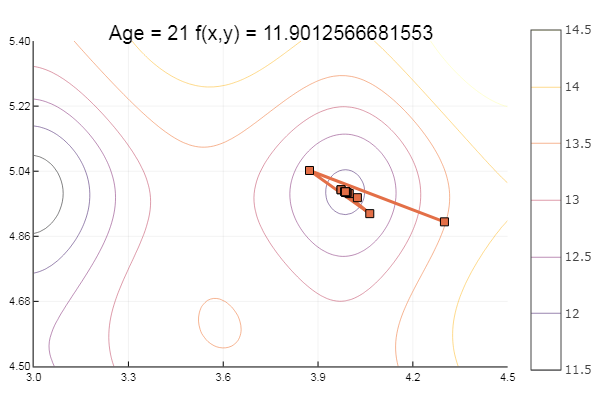
ofGradient(fit = [4.3, 4.9], st = 1.9, low = [-5.2-2.2], up = [8.17.1] )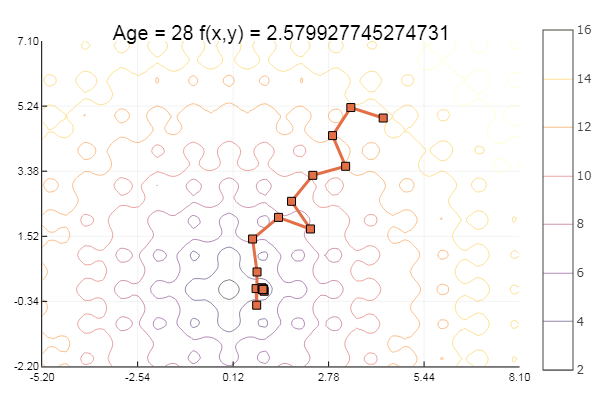
… And a bit more:
ofGradient(fit = [4.3, 4.9], st = 8.9, low = [-5.2-2.2], up = [8.17.1] )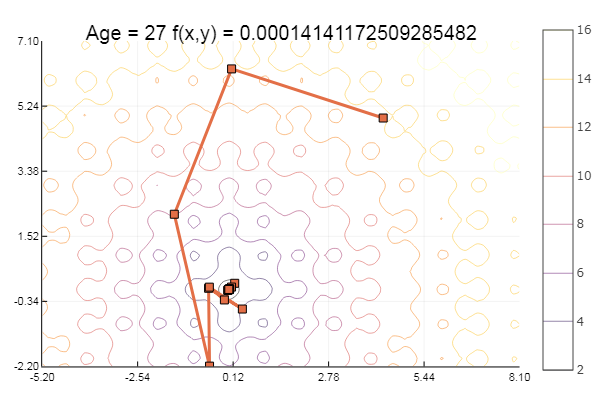
Fine! And now something with a ravine, for example the Rosenbrock function:
rosenbrok(x) = 100(x[2]-x[1]*x[1])^2 + (x[1]-1)^2# f(0,0) = 0, x_i ∈ [-5,5]
fun = rosenbrok
plotter(surface, low = [-2-1.5], up = [21.5])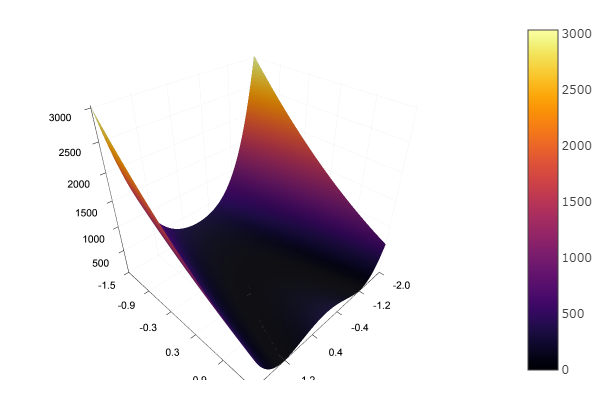
ofGradient(fit = [2.3, 2.2], st = 9.9, low = [-5.2-5.2], up = [8.17.1] )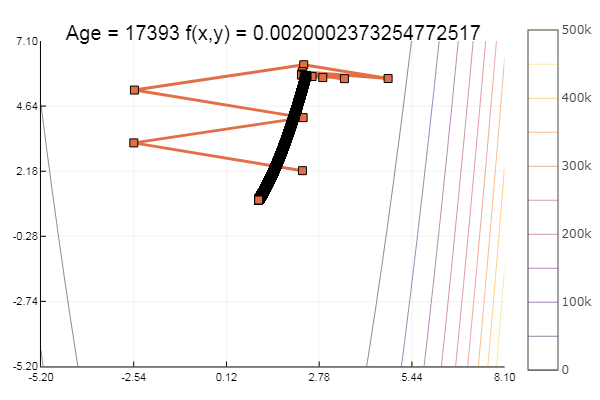
ofGradient(fit = [2.3, 2.2], st = 0.9, low = [-5.2-5.2], up = [8.17.1] )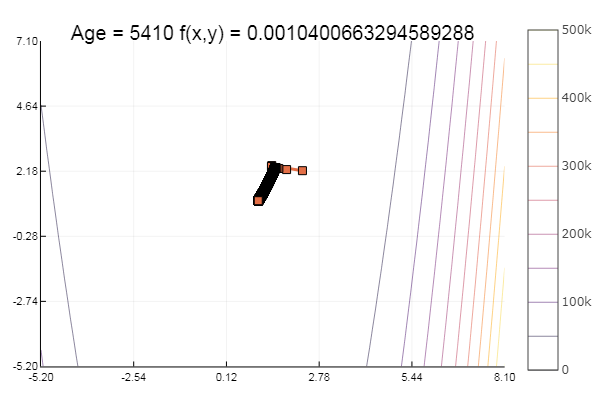
Moral: gradients do not like the slopes.
Simplex method
The Nelder – Mead method, also known as the deformable polyhedron method and the simplex method, is an unconditional optimization method for a function of several variables that does not use a derivative (or more precisely, a gradient) function, and therefore can be easily applied to non-smooth and / or noisy functions.
The essence of the method lies in the sequential movement and deformation of the simplex around the extremum point.
The method finds a local extremum and can “get stuck” in one of them. If you still need to find a global extremum, you can try to choose another initial simplex.
Secondary functions:
#сортировка столбцов матрицы выстраиванием элементов последней строки в порядке возрастания
function sortcoord(Mx)
N = size(Mx,2)
f = [fun(Mx[:,i]) for i in1:N] # значение функции в вершинах
Mx[:, sortperm(f)]
#Return a permutation vector I that puts v[I] in sorted order.
end
# Норма матрицы
function normx(Mx)
m = size(Mx,2)
D = zeros(m-1,m)
vecl(x) = sqrt( sum(u -> u*u, x) )# длина вектораfor i = 1:m, j = i+1:m
D[i,j] = vecl(Mx[:,i] - Mx[:,j]) # считает длину разности столбцов
end
D
sqrt(maximum(D))
end
function simplexplot(xy, low, up)
for i = 1:length(xy)
if i%11 == 0
low *= 0.05
up *= 0.05
end
Xs = range(low[1], stop = up[1], length = 80)
Ys = range(low[2], stop = up[2], length = 80)
Zs = [ fun([x y]) for y in Ys, x in Xs ]
contour(Xs, Ys, Zs)
xaxis!( low[1]:(up[1]-low[1])*0.2:up[1] )
yaxis!( low[2]:(up[2]-low[2])*0.2:up[2] )
plot!(xy[i][1,:], xy[i][2,:], w = 3, legend = false, marker = :circle )
title!("Age = $i f(x,y) = $(fun(xy[i][:,1]))")
savefig("$fun $i.png")
end
endAnd the simplex method itself:
function ofNelderMid(; ndimes = 2, ε = 1e-4, fit = [.1, .1], low = [-1-1], up = [11])
vecl(v) = sqrt( sum(x -> x*x, v) )
k = 0
N = ndimes
Xx = zeros(N, N+1)
coords = []
for i = 1:N+1
Xx[:,i] = fit
end
for i = 1:N
Xx[i,i] += 0.5*vecl(fit) + ε
end
p = normx(Xx)
while p > ε
k += 1
Xx = sortcoord(Xx)
Xo = [ sum(Xx[i,1:N])/N for i = 1:N ] # среднее эл-тов i-й строки
Ro = 2Xo - Xx[:,N+1]
FR = fun(Ro)
if FR > fun(Xx[:,N+1])
for i = 2:N+1
Xx[:,i] = 0.5(Xx[:,1] + Xx[:,i])
end
elseif FR < fun(Xx[:,1])
Eo = Xo + 2(Xo - Xx[:,N+1])
if FR > fun(Eo)
Xx[:,N+1] = Eo
else
Xx[:,N+1] = Ro
end
elseif FR <= fun(Xx[:,N])
Xx[:,N+1] = Ro
else
Co = Xo + 0.5(Xo - Xx[:,N+1])
if FR > fun(Co)
Xx[:,N+1] = Co
else
Xx[:,N+1] = Ro
end
end
end
end
#println(k, " ", p, " ", Xx[:,1])
push!(coords, [Xx[:,1:3] Xx[:,1] ])
p = normx(Xx)
end #while #simplexplot(coords, low, up)
fit = Xx[:,1]
end
ofNelderMid(fit = [-9, -2], low = [-22], up = [-88])
And for dessert, some beech ... for example, the function of Bukin
f ( x , y ) = 100 √| y - 0.01 x 2 | +0.01| x+10|
bukin6(x) = 100sqrt(abs(x[2]-0.01x[1]*x[1])) + 0.01abs(x[1]+10)
# f(-10,1) = 0, x_i ∈ [-15,-5; -3,3]
fun = bukin6
ofNelderMid(fit = [-10, -2], low = [-3-7], up = [-8-4.5])
The local minimum is nothing, the main thing is to choose the starting simplex correctly, so for myself I found a favorite.
Bonus Methods of Nelder-Meade, the fastest descent and coordinate descent in C ++
/*
* File: main.cpp
* Author: User
*
* Created on 3 сентября 2017 г., 21:22
*/#include<iostream>#include<math.h>usingnamespacestd;
typedefdouble D;
classModel
{public:
D *fit;
D ps;
Model();
D I();
};
Model :: Model()
{
ps = 1;
fit = new D[3];
fit[0]=1.3;
fit[1]=1.;
fit[2]=2.;
}
D Model :: I() // rosenbrock
{
return100*(fit[1]-fit[0]*fit[0]) * (fit[1]-fit[0]*fit[0]) + (1-fit[0])*(1-fit[0]);
}
classMethods :public Model
{
public:
voidofDescent();
voidNewton(int i);
voidSPI(int i); //sequential parabolic interpolationvoidCutters(int i);
voidInterval(D *ab, D st, int i);
voidGold_section(int i);
voidofGradient();
voidGrad(int N, D *g, D delta);
voidSrt(D **X, int N);
voidofNelder_Mid();
D Nor(D **X, int N);
};
void Methods :: ofDescent()//метод покоординатного спуска
{
int i, j=0;
D *z = new D[3];
D sumx, sumz;
sumx = sumz = 0;
do
{
sumx = sumz = 0;
for(i=0; i<3; i++)
z[i] = fit[i];
for(i=0; i<2; i++)
{
//Cutters(i);//SPI(i);
Newton(i);
//Gold_section(i);
sumx += fit[i];
sumz += z[i];
}
j++;
//if(j%1000==0)cout << j << " " << fit[0] << " " << fit[1] << " " << fit[2] << " " << fit[3] << endl;
//cout << sumz << " " << sumx << endl;
}
while(fabs(sumz - sumx) > 1e-6);
delete[]z;
}
void Methods :: SPI(int i)
{
int k = 2;
D f0, f1, f2;
D v0, v1, v2;
D s0, s1, s2;
D *X = new D[300];
X[0] = fit[i] + 0.01;
X[1] = fit[i];
X[2] = fit[i] - 0.01;
while(fabs(X[k] - X[k-1]) > 1e-3)
{
fit[i] = X[k];
f0 = I();
fit[i] = X[k-1];
f1 = I();
fit[i] = X[k-2];
f2 = I();
v0 = X[k-1] - X[k-2];
v1 = X[k ] - X[k-2];
v2 = X[k ] - X[k-1];
s0 = X[k-1]*X[k-1] - X[k-2]*X[k-2];
s1 = X[k ]*X[k ] - X[k-2]*X[k-2];
s2 = X[k ]*X[k ] - X[k-1]*X[k-1];
X[k+1] = 0.5*(f2*s2 - f1*s1 + f0*s0) / (f2*v2 - f1*v1 + f0*v0);
k++;
cout << k << " " << X[k] << endl;
}
fit[i] = X[k];
delete[]X;
}
void Methods :: Newton(int i)
{
D dt, T, It;
int k=0;
while(fabs(T-fit[i]) > 1e-3)
{
It = I();
T = fit[i];
fit[i] += 0.01;
dt = I();
fit[i] -= 0.01;
fit[i] -= It*0.001 / (dt - It);
cout << k << " " << fit[i] << endl;
k++;
}
}
void Methods :: Cutters(int i)
{
D Tn, Tnm, Tnp, It, Itm;
int j=0;
Tn = 0.15;
Tnm = 2.65;//otrezok
Itm = I();
//cout << Tnm << " " << Tn << endl;while(fabs(Tn-Tnm) > 1e-6)
{
fit[i] = Tn;
It = I();
Tnp = Tn - It * (Tn-Tnm) / (It-Itm);
cout << j+1 << " " << Tnp << endl;
Itm = It;
Tnm = Tn;
Tn = Tnp;
j++;
}
fit[i] = Tnp;
}
void Methods :: Interval(D *ab, D st, int i)
{
D Fa, Fdx, d, c, Fb, fitbox = fit[i];
ab[0] = fit[i];
Fa = I();
fit[i] -= st;
Fdx = I();
fit[i] += st;
if(Fdx < Fa)
st = -st;
fit[i] += st;
ab[1] = fit[i];
Fb = I();
while(Fb < Fa)
{
d = ab[0];
ab[0] = ab[1];
Fa = Fb;
fit[i] += st;
ab[1] = fit[i];
Fb = I();
cout << Fb << " " << Fa << endl;
}
if(st<0)
{
c = ab[1];
ab[1] = d;
d = c;
}
ab[0] = d;
fit[i] = fitbox;
}
void Methods :: Gold_section(int i)
{
D Fa, Fb, al, be;
D *ab = new D[2];
D st = 0.5;
D e = 0.5*(sqrt(5) - 1);
Interval(ab, st, i);
al = e*ab[0] + (1-e)*ab[1];
be = e*ab[1] + (1-e)*ab[0];
fit[i] = al;
Fa = I();
fit[i] = be;
Fb = I();
while(fabs(ab[1]-ab[0]) > e)
{
if(Fa < Fb)
{
ab[1] = be;
be = al;
Fb = Fa;
al = e*ab[0] + (1-e)*ab[1];
fit[i] = al;
Fa = I();
}
if(Fa > Fb)
{
ab[0] = al;
al = be;
Fa = Fb;
be = e*ab[1] + (1-e)*ab[0];
fit[i] = be;
Fb = I();
}
cout << ab[0] << " " << ab[1] << endl;
}
fit[i] = 0.5*(ab[0] + ab[1]);
cout << ab[0] << " " << ab[1] << endl;
}
void Methods :: Grad(int N, D *g, D delta)//вектор направления градиента
{
int n;
D Fr, Fl, modG=0;
for(n=0; n<N; n++)
{
fit[n] += delta;
Fr = I();
fit[n] -= delta;
fit[n] -= delta;
Fl = I();
fit[n] += delta;
g[n] = (Fr - Fl)*0.5/delta;
modG += g[n]*g[n];
}
modG = sqrt(modG);
for(n=0; n<N; n++)
g[n] /= modG;
g[N] = I();
}
void Methods :: ofGradient()
{
int n, j=0;
D Fun, st, eps;
constint N = 2;
D *g = new D[N+1];
st = 0.1;
eps = 0.000001;
while(st > eps)
{
Grad(N,g,0.0001);
for(n=0; n<N; n++)
fit[n] -= st*g[n];
Fun = I();
if(Fun >= g[N])
{
st /= 2.;
for(n=0; n<N; n++)
fit[n] += st*g[n];
}
j++;
cout << j << " " << fit[0]/ps << " " << fit[1]/ps << " " << fit[2]/ps<< endl;
}
}
void Methods :: ofNelder_Mid()
{
int i, j, k;
D modz = 0., p, eps = 1e-3;
D FR, FN, F0, FE, FNm1, FC;
constint N = 2;
D *Co = new D[N];
D *Eo = new D[N];
D *Ro = new D[N];
D *Xo = new D[N];
D **Xx = new D*[N];
D **dz = new D*[N];
for(i=0;i<N;i++)
{
dz[i] = new D[N];
Xx[i] = new D[N+1];
}
for(i=0;i<N;i++)
for(j=0;j<N;j++)
if(i^j)
dz[i][j] = 0;
else
dz[i][j] = 1;
for(i=0;i<N;i++)
Xx[i][N] = fit[i];
for(i=0;i<N;i++)
modz += fit[i]*fit[i];
modz = sqrt(modz);
for(i=0;i<N;i++)
dz[i][i] = 0.5*modz;
for(i=0;i<N;i++)
for(j=0;j<N;j++)
Xx[i][j] = fit[i] + dz[i][j];
k = 0;
p = Nor(Xx, N);
while(p > eps)
{
k++;
Srt(Xx, N);
for(i=0;i<N;i++)
Xo[i] = 0.;
for(i=0;i<N;i++)
for(j=0;j<N;j++)
Xo[i] += Xx[i][j];
for(i=0;i<N;i++)
Xo[i] /= N;
for(i=0;i<N;i++)
Ro[i] = Xo[i] + (Xo[i]-Xx[i][N]);
for(i=0;i<N;i++)
fit[i] = Ro[i];
FR = I();
for(i=0;i<N;i++)
fit[i] = Xx[i][N];
FN = I();
if(FR > FN)
{
for(i=0;i<N;i++)
for(j=1;j<=N;j++)
Xx[i][j] = 0.5*(Xx[i][0] + Xx[i][j]);
}
else
{
for(i=0;i<N;i++)
fit[i] = Xx[i][0];
F0 = I();
if(FR < F0)
{
for(i=0;i<N;i++)
Eo[i] = Xo[i] +2*(Xo[i] - Xx[i][N]);
for(i=0;i<N;i++)
fit[i] = Eo[i];
FE = I();
if(FE < FR)
for(i=0;i<N;i++)
Xx[i][N] = Eo[i];
elsefor(i=0;i<N;i++)
Xx[i][N] = Ro[i];
}
else
{
for(i=0;i<N;i++)
fit[i] = Xx[i][N-1];
FNm1 = I();
if(FR <= FNm1)
for(i=0;i<N;i++)
Xx[i][N] = Ro[i];
else
{
for(i=0;i<N;i++)
Co[i] = Xo[i] +0.5*(Xo[i] - Xx[i][N]);
for(i=0;i<N;i++)
fit[i] = Co[i];
FC = I();
if(FC < FR)
for(i=0;i<N;i++)
Xx[i][N] = Co[i];
elsefor(i=0;i<N;i++)
Xx[i][N] = Ro[i];
}
}
}
for(i=0;i<N;i++)
cout << Xx[i][0] << " ";
cout << k << " " << p << endl;
p = Nor(Xx, N);
if(p < eps)
break;
}
for(i=0;i<N;i++)
fit[i] = Xx[i][0];
/*for(i=0;i<N;i++)
{
for(j=0;j<N+1;j++)
cout << Xx[i][j] << " ";
cout << endl;
}*/delete[]Co;
delete[]Xo;
delete[]Ro;
delete[]Eo;
for(i=0;i<N;i++)
{
delete[]dz[i];
delete[]Xx[i];
}
}
//возвращает норму вектора
D Methods :: Nor(D **X, int N)
{
int i, j, k;
D norm, xij, pn = 0.;
for(i=0;i<N;i++)
for(j=i+1;j<=N;j++)
{
xij = 0.;
for(k=0;k<N;k++)
xij += ( (X[k][i]-X[k][j])*(X[k][i]-X[k][j]) );
pn = sqrt(xij);//считает длину разности столбцовif(norm > pn)
norm = pn;//ищет максимальную длину
}
returnsqrt(norm);
}
//сортировка координат вершин симплексаvoid Methods :: Srt(D **X, int N)
{
int i, j, k;
D temp;
D *f = new D[N+1];
D *box = new D[N];
D **y = new D*[N+1];
for(i=0;i<N+1;i++)//динамическая память
y[i] = new D[N+1];
for(i=0;i<N;i++)
box[i] = fit[i];//старые тау в коробкуfor(i=0;i<=N;i++)
{
for(j=0;j<N;j++)
fit[j] = X[j][i];
f[i] = I();//значения функции в вершинах симплекса
}
for(i=0;i<N;i++)
fit[i] = box[i];//выкладывает тау из коробкиfor(i=0;i<N;i++)
for(j=0;j<=N;j++)
y[i][j] = X[i][j];
for(i=0;i<=N;i++)
y[N][i] = f[i];//stack(X, f)//Сортирует столбцы матрицы таким образом,//чтобы расположить элементы в строке N в порядке возрастанияfor(i=1;i<=N;i++)
for(j=0;j<=N-i;j++)
if(y[N][j] >= y[N][j+1])
for(k=0;k<=N;k++)
{
temp = y[k][j];
y[k][j] = y[k][j+1];
y[k][j+1] = temp;
}
//submatrix вырезает отсортированноеfor(i=0;i<N;i++)
for(j=0;j<=N;j++)
X[i][j] = y[i][j];
/*
for(i=0;i<=N;i++)
{
for(j=0;j<=N;j++)
cout << y[i][j] << " ";
cout << endl;
}
*/for(i=0;i<N+1;i++)
delete[]y[i];
delete[]box;
delete[]f;
}
intmain(){
Methods method;
//method.ofDescent();//method.ofGradient();
method.ofNelder_Mid();
return0;
}
It's enough for today. The next step will be logical to try something from the global optimization, type more test functions, and then examine the packages with built-in methods.