How to modify the FEDOR robot and the ISS flight chair

It remains a little more than two months before the launch of the FEDOR robot on the ISS, and the process of its transformation into a cyber-cosmonaut is almost complete.
In continuation of this publication .
The Fedor Robot or FEDOR (Final Experimental Demonstration Object Research) is an anthropomorphic robot developed by the Android Technique NGO and the Advanced Research Foundation (FPI), and should replace a person in high-risk places.
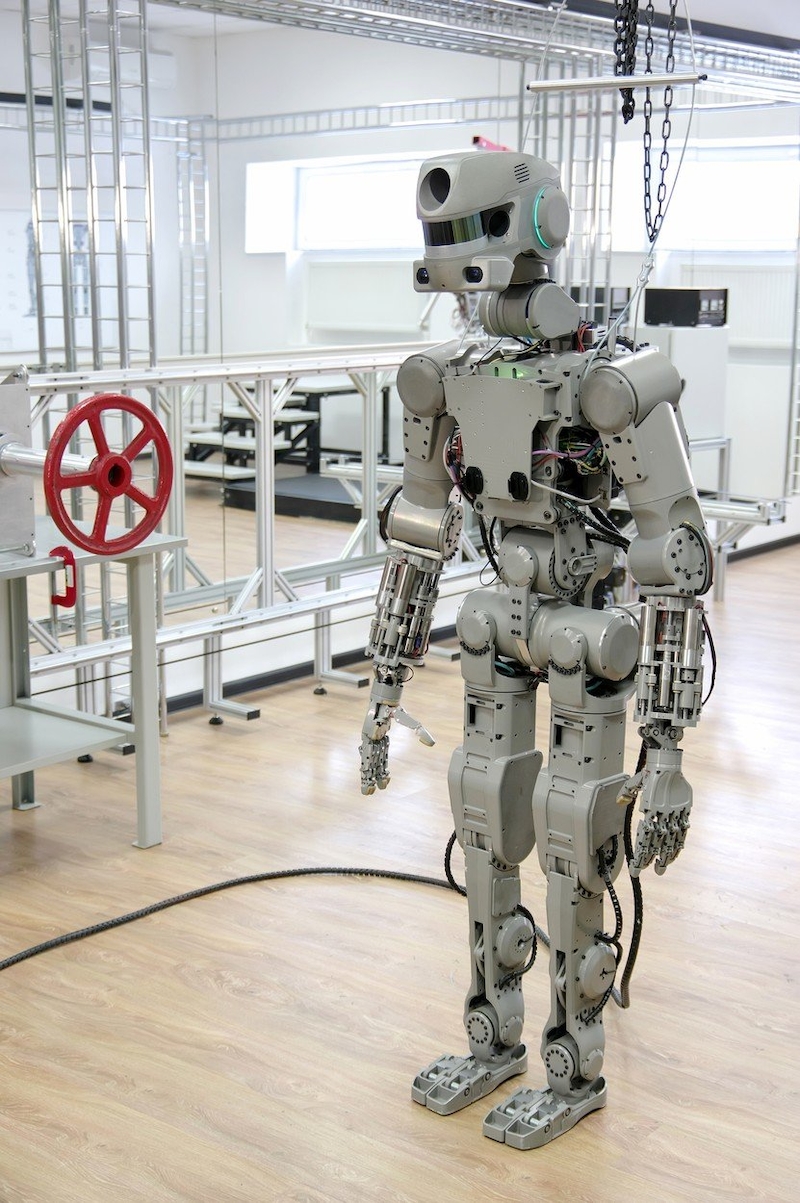
Features of the FEDOR robot:
- almost 190 cm tall;
- weight up to 160 kg (depending on the modules used);
- power up to 13.5 kW (20 horsepower), battery - external type satchel or cable power;
- consists of 15 thousand parts;
- software: real-time operating system developed in St. Petersburg on the basis of Linux, control software in C ++, C # and Python;
- offline work up to 1 hour;
- equipped with two cameras, a thermal imager, a microphone, GPS, GLONASS, 15 rangefinder type lasers and a special system for determining the position of your body;
- the video channels of the stereoscopic vision system of the robot can work both jointly and separately (joint work of the channels allows you to determine the distance to objects, and separate - solve at least two functional tasks at the same time, for example, perform work actions with two different tools at the same time);
- operating modes: stand-alone, copying (exactly repeats the actions of the operator);
- robot mechanics can reproduce almost any movement of the human body, and software, including replenished libraries, allows you to expand the robot's professional skills.
It turns out that the Russian Space Agency planned to send two FEDOR robots to the ISS simultaneously on the Soyuz MS unmanned vehicle on August 22, 2019.
This space test project was called the Cyber Crew. However, the full implementation of this project is still in question.
The problem is that the FEDOR robot in this case passes according to design calculations not as scientific equipment that can be compactly placed in the cargo compartment and unpacked and used on board the ISS, but as a full-fledged humanoid construct that needs to be placed like ordinary astronauts inside the ship "Union MS-14."
Since, firstly, astronauts on the ISS are not trained to assemble such a complex device, and according to instructions from the Earth, they will be able to assemble it, but precious space time will be spent on this.
Secondly, this first test flight of the "cyber crew" in any case should reveal a lot of problems and issues that will be solved both on board the ISS in the current operational mode and taken into account and analyzed to adjust the scientific projects of further missions.
So immediately there was a need to finalize the robot structural elements for space standards.
After the first version of the FEDOR robot was transferred to Roscosmos and the SP Korolev Rocket and Space Corporation Energia (RSC Energia) to study the possibility of its use in manned programs, space engineers from Roscosmos had new tasks - to prepare FEDOR robot for a space mission in a fairly short time.
The complex transferred to Roscosmos includes elements: a mobile robot, control panels, integration tools and the ground segment. Space
requirements for astronauts: The

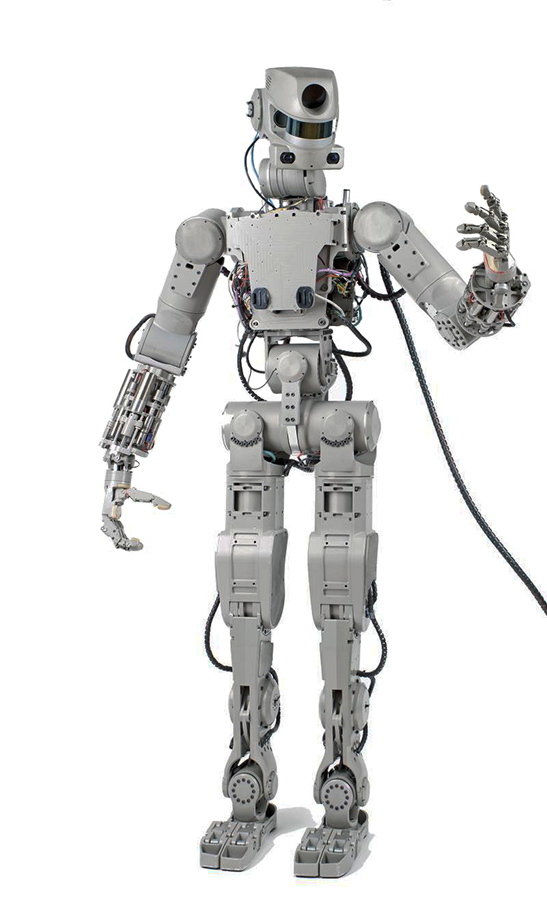
space version of the FEDOR robot, unlike the civilian version, has undergone improvements:
- reduced robot weight to 105 kg;
- the shoulder girdle was reduced by a few centimeters (to increase the clearance along the diameter of the hatch, which was six to seven centimeters, and in tests it turned out that it was inconvenient to remove it);
- Replaced regular battery to meet space flight safety requirements;
- new drives installed;
- The design of the robot is tested on a vibrating stand.
At the moment, all systems of the adapted robot of the FEDOR-cosmonaut version are operational and ready for flight.
But with the completion of the regular chair for the FEDOR robot, RSC Energia engineers had to tinker.

At present, this issue has been resolved, the FEDOR cosmonaut will fly to the ISS in the Soyuz MS-14 spacecraft not in the astronaut’s regular lodgement (it turned out that it’s not enough for the robot even in the most adapted state), but in a specially made “chair-frame” from aluminum alloys, which will protect the components and mechanisms of the robot from external influences during the flight.
The first version of the “chair-frame” for the robot looked like this:
After docking with the ISS, in zero gravity, the astronauts will have to transfer the robot from the spacecraft to the ISS without any adaptations and continue to work with it, therefore, in Roscosmos and RSC Energia they try to facilitate this task as much as possible and minimize the robot’s transportation time as at the unloading stage, and in the future when tested in space conditions.
In general, the anthropomorphic robot Fedor has not yet boarded the ISS, but has already set many tasks for both engineers on Earth and astronauts aboard the orbital complex.
The launch of the Soyuz-2.1a launch vehicle with the Soyuz MS-14 unmanned vehicle is scheduled for August 22, 2019. The spacecraft will remain in the ISS for about a week and a half, and then automatically return to Earth.
By the way, within the framework of this test flight, it is planned to test the interaction of the digital missile control system and the analog "stuffing" of the emergency rescue system. If something goes wrong, then the robot should still remain functional.
And the ISS is now rotating crew.
Russian cosmonaut Oleg Kononenko, Canadian David Saint-Jacques and American Anne McClain will return to Earth from the ISS. They arrived at the station in December 2018.
Transition hatches between the ISS and Soyuz will be closed on June 24 at 23.10 Moscow time. The undocking from the station is scheduled for June 25, 2019 at 2.25, the inclusion of the ship’s engines for descent from orbit is at 4.54.
July 20, 2019 it is planned to send the ISS on board the Soyuz MS-13 spacecraft crew consisting of: Alexander Skvortsov, Andrew Morgan and Luca Parmitano.
Thus, Alexei Ovchinin (Russia), Tyler Nicholas Haig and Kristina Koch (both from the USA) and the new three astronauts from the July launch will meet FEDOR robots at the ISS.
The FEDOR astronaut is controlled in three ways: via radio, optical fiber, or ordinary electric cable.
The robot can be controlled not only by astronauts aboard the ISS, but technicians on Earth, connecting to the robot via an external communication channel and using a special “control” suit with 3D glasses to see the situation through the eyes of the robot.
It is very interesting what scientific tasks and experiments are planned and will be done on the ISS with the FEDOR robot.
Although back in 2016, it was stated that the FEDOR robot will be able to go into outer space, carry out maintenance and other scheduled work.
And after completing additional tests on the electromagnetic compatibility of the robot on the ISS, the communication channel will be tested and the FEDOR cosmonaut will execute a set of commands coming from the Earth.
