DIY: make a combat robot at home. Part 1
My team and I are making a robot to participate in the Battle of Robots . Our robot is called Big Brother, and it is looking at you! Looks, catches up and shatters. Predatory nature and powerful kinetic weapons make it an ideal killing machine. He is already here, he is near - run!
This is a brief history of the development of a combat robot at home. Caution traffic! Lots of images.

We take part in the competition " Armored Boat 2015: Autumn Warm Up " ( http://www.bronebot.ru/ ). Robot fights have been a popular show in the UK and USA for over 25 years. It will be held in Moscow for the first time. Peter Redmond, President of the Irish Federation of Robot Battles Federation, Vice President of the English Federation of Robot Battles Federation, creator of special effects “Top Gear” and “Games of Thrones” comes to judge. When we were offered to participate in the competition, we agreed without question, although in vain ...
There is very little time, but we are trying our best.

The battles will take place on a special bulletproof stage 10x10 meters with beveled corners, i.e. this is actually an octagon.
Other robots

Most robots have rich experience in participating in competitions, but this only makes the task of winning against them even more interesting.

Each team member does everything in his power to achieve a bright future, but I especially want to highlight the work of Sasha and Andrey. They put all their free time into the robot. The fact that our robot will destroy everyone else is precisely their merit!
After watching a huge number of video competitions of robots, we realized for ourselves the main characteristics of the robot, which give advantages on the battlefield:
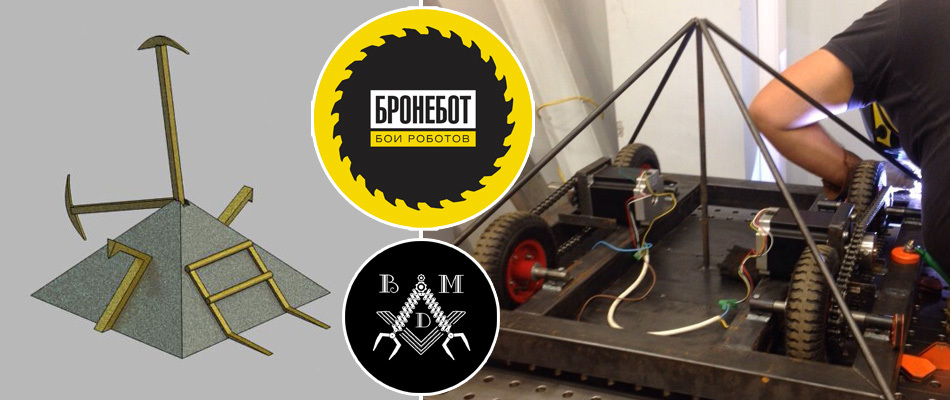
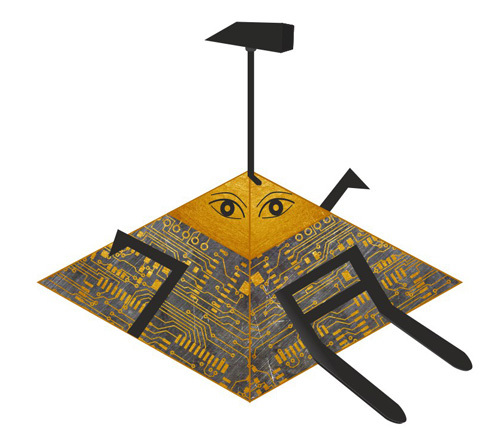
So the idea was born to create a robot in the shape of a pyramid with the main tool in the form of a twin hammer for the ability to strike in two directions, with two small hammers on the sides, and a fork tipper.
Also from features: Detachable part of the robot, and saws.
Cut the profile.

Cook the frame.




Wheels from the construction market.

We had very great hope for Nema 43 stepper motors. According to the declared characteristics, they suited us, we cooked a frame for them. When connected, it turned out that they could not cope with any load. Urgently had to look for another solution. We found 36V 500W motors and have already remade the frame for them.
Radio control takes place through 8-channel radio equipment for the main operator, 4-channel equipment for the gun operator and 2-channel equipment for the detachable part.
The PWM signal from the remote control is engaged in Arduino (The soul of my robotic lawnmower) The problem with the processing was that it takes a lot of time to calculate the PWM signal from 8 channels. Performing this in the main cycle of the program, it turned out to be impossible to send an adequate number of pulses for movement to the engine drivers. The solution was to bring the work with the steps into the function launched by the timer and by changing the timer parameters in the main loop. Now it turns out that all this is not necessary, we control the collector motors through the driver, to which we will feed the PWM, which we can safely change in the main program cycle.

Pneumatic system in the analysis:

The main idea was to use for each two-way cylinder 4 valves that are cross-connected. When we open the valve for filling the cylinder on one side, we open for bleeding the valve on the opposite side.
To control the valves, we decided to use such a module with 8 relays, which is enough for 16 pair-connected valves, i.e. for 4 cylinders.


The main hammer. We think and argue over the design of the main pick hammer.

As saws, we decided to use mowing engines and knives from Robomow . Firstly, the knives are made of durable steel, and the engines give a good moment and speed. Secondly, Robomow agreed to sponsor us.
PS: I'm preparing the second part, we are also preparing for the competition of autonomous robotic lawnmowers .
PPS (for those who think that time is short):

PPPS: Our VK group
PPPPS: Continuation of the article
This is a brief history of the development of a combat robot at home. Caution traffic! Lots of images.
Competition Description
We take part in the competition " Armored Boat 2015: Autumn Warm Up " ( http://www.bronebot.ru/ ). Robot fights have been a popular show in the UK and USA for over 25 years. It will be held in Moscow for the first time. Peter Redmond, President of the Irish Federation of Robot Battles Federation, Vice President of the English Federation of Robot Battles Federation, creator of special effects “Top Gear” and “Games of Thrones” comes to judge. When we were offered to participate in the competition, we agreed without question, although in vain ...
There is very little time, but we are trying our best.
Competition Rules
Below is information for designers on the creation of robots participating in battles of armored boats.
1. Construction
1.1. Weight. Robots are presented in three weight categories. Depending on the category chosen by the participant, the maximum weight of robots is:
For walking robots, the maximum weight is 30% more in all classes. Walking robots should not use the crankshaft to move.
1.2. The maximum dimensions of the structure depend on the category:
1.3. The use of cluster robots is allowed (capable of being divided into several independent robots). At the beginning of the battle, the robot must be one. If 50% of bots or more are damaged, the robot is considered a loser.
1.4. Robots must be equipped with ON / OFF toggle switches in the part remote from the weapon, completely disconnecting the power to all subsystems of the robot. If there are several toggle switches, they should be near. The toggle switches can be hidden under the shell, but should be accessible without turning the robot over or disassembling with tools.
1.5. Flying robots are prohibited.
2. Electricity
2.1. The supply voltage of robots should not exceed 36 volts.
2.2. All electrical connections must be made with high quality and properly insulated. Cables should be routed with a minimal chance of being torn.
2.3. Batteries must be completely insulated and free of liquids. Battery connections must be completely insulated.
2.4. Internal combustion engines are prohibited.
3. Hydraulics
3.1. The pressure in the hydraulic lines must not exceed 204 atm (3000 psi / 20.4 mps).
3.2. Hydraulic fluids must be in reliable containers inside the robot. All hydraulic lines must be laid with a minimal chance of being damaged.
4. Pneumatics
4.1. The pressure in the pneumatic lines must not exceed 68 atm (1000 psi / 6.8 mps).
4.2. Pneumatic containers must be of appropriate quality, industrial production. The pressure in them must comply with the manufacturer's specifications.
4.3. Pneumatic containers must be secured inside the robot and protected from damage.
4.4. Gases for pneumatics must be non-flammable or inert, for example, air, carbon dioxide, argon, nitrogen.
4.5. It should be possible to release the pressure in the system without disassembling the design.
5. Weapons
5.1. Each robot must be equipped with at least one active weapon.
5.2. Prohibited Weapons:
5.3. The speed of rotating weapons (circular saws, rotating blades, etc.) must not exceed the manufacturer's specifications. Specifications should be available for verification.
5.4. Hardened steel rotary disks and blades, which if broken, form splinters, are prohibited.
5.5. The length of the bayonet blades should not exceed 20 cm.
5.6. All movable manipulators, even without weapons, must have locking fasteners. Fasteners must be closed in all cases except when the robot is in the arena or maintenance.
5.7. All sharp edges and elements of weapons should have covers or nozzles. These items are not taken into account when weighing.
6. Radio control
6.1. The frequencies used must be allowed by the legislation of the Russian Federation.
6.2. The robot should not have autonomy. All control should be carried out exclusively from the operator console.
6.3. All robot systems must be turned off when the control signal is lost.
6.4. Stability of management should be demonstrated to the Organizers in advance for admission to participation.
6.5. To avoid frequency conflicts between robots, participants must have two sets of “transmitter-receiver” operating at different frequencies.
1. Construction
1.1. Weight. Robots are presented in three weight categories. Depending on the category chosen by the participant, the maximum weight of robots is:
- Heavy class: 100 kg.
- Middle class: 50 kg.
- Light class: 17 kg.
For walking robots, the maximum weight is 30% more in all classes. Walking robots should not use the crankshaft to move.
1.2. The maximum dimensions of the structure depend on the category:
- Heavy class: 1.5 x 1 meters in length and width.
- Middle class: 1 x 0.75 meters in length and width.
- Light class: 0.5 x 0.5 meters in length and width.
- Height is not limited.
1.3. The use of cluster robots is allowed (capable of being divided into several independent robots). At the beginning of the battle, the robot must be one. If 50% of bots or more are damaged, the robot is considered a loser.
1.4. Robots must be equipped with ON / OFF toggle switches in the part remote from the weapon, completely disconnecting the power to all subsystems of the robot. If there are several toggle switches, they should be near. The toggle switches can be hidden under the shell, but should be accessible without turning the robot over or disassembling with tools.
1.5. Flying robots are prohibited.
2. Electricity
2.1. The supply voltage of robots should not exceed 36 volts.
2.2. All electrical connections must be made with high quality and properly insulated. Cables should be routed with a minimal chance of being torn.
2.3. Batteries must be completely insulated and free of liquids. Battery connections must be completely insulated.
2.4. Internal combustion engines are prohibited.
3. Hydraulics
3.1. The pressure in the hydraulic lines must not exceed 204 atm (3000 psi / 20.4 mps).
3.2. Hydraulic fluids must be in reliable containers inside the robot. All hydraulic lines must be laid with a minimal chance of being damaged.
4. Pneumatics
4.1. The pressure in the pneumatic lines must not exceed 68 atm (1000 psi / 6.8 mps).
4.2. Pneumatic containers must be of appropriate quality, industrial production. The pressure in them must comply with the manufacturer's specifications.
4.3. Pneumatic containers must be secured inside the robot and protected from damage.
4.4. Gases for pneumatics must be non-flammable or inert, for example, air, carbon dioxide, argon, nitrogen.
4.5. It should be possible to release the pressure in the system without disassembling the design.
5. Weapons
5.1. Each robot must be equipped with at least one active weapon.
5.2. Prohibited Weapons:
- Pyrotechnics
- Flamethrowers
- Liquids
- Caustic substances
- Unguided shells
- Stun guns
- Silencers
- Heat guns
- Gaussgan
- Any weapon using burning or flammable gases
5.3. The speed of rotating weapons (circular saws, rotating blades, etc.) must not exceed the manufacturer's specifications. Specifications should be available for verification.
5.4. Hardened steel rotary disks and blades, which if broken, form splinters, are prohibited.
5.5. The length of the bayonet blades should not exceed 20 cm.
5.6. All movable manipulators, even without weapons, must have locking fasteners. Fasteners must be closed in all cases except when the robot is in the arena or maintenance.
5.7. All sharp edges and elements of weapons should have covers or nozzles. These items are not taken into account when weighing.
6. Radio control
6.1. The frequencies used must be allowed by the legislation of the Russian Federation.
6.2. The robot should not have autonomy. All control should be carried out exclusively from the operator console.
6.3. All robot systems must be turned off when the control signal is lost.
6.4. Stability of management should be demonstrated to the Organizers in advance for admission to participation.
6.5. To avoid frequency conflicts between robots, participants must have two sets of “transmitter-receiver” operating at different frequencies.
Arena
The battles will take place on a special bulletproof stage 10x10 meters with beveled corners, i.e. this is actually an octagon.
Other robots
Most robots have rich experience in participating in competitions, but this only makes the task of winning against them even more interesting.
our team
Each team member does everything in his power to achieve a bright future, but I especially want to highlight the work of Sasha and Andrey. They put all their free time into the robot. The fact that our robot will destroy everyone else is precisely their merit!
- Vyacheslav Golitsyn
- Alexander Egorov
- Andrey Taktashov
- Dmitry Eliseev
- Pavel Pozdnyakov
Short description of the robot
After watching a huge number of video competitions of robots, we realized for ourselves the main characteristics of the robot, which give advantages on the battlefield:
- Low center of mass
- Low clearance
- The ability to turn in the event of a coup
- Opportunity to knock over an opponent
- Body geometry as passive protection.
So the idea was born to create a robot in the shape of a pyramid with the main tool in the form of a twin hammer for the ability to strike in two directions, with two small hammers on the sides, and a fork tipper.
Also from features: Detachable part of the robot, and saws.
Frame, shape, assembly
Cut the profile.
Cook the frame.
Wheels from the construction market.
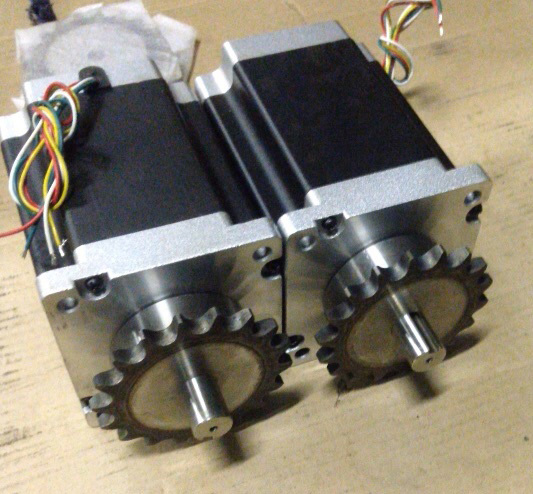
Engines
We had very great hope for Nema 43 stepper motors. According to the declared characteristics, they suited us, we cooked a frame for them. When connected, it turned out that they could not cope with any load. Urgently had to look for another solution. We found 36V 500W motors and have already remade the frame for them.
Radio control
Radio control takes place through 8-channel radio equipment for the main operator, 4-channel equipment for the gun operator and 2-channel equipment for the detachable part.
The PWM signal from the remote control is engaged in Arduino (The soul of my robotic lawnmower) The problem with the processing was that it takes a lot of time to calculate the PWM signal from 8 channels. Performing this in the main cycle of the program, it turned out to be impossible to send an adequate number of pulses for movement to the engine drivers. The solution was to bring the work with the steps into the function launched by the timer and by changing the timer parameters in the main loop. Now it turns out that all this is not necessary, we control the collector motors through the driver, to which we will feed the PWM, which we can safely change in the main program cycle.
Pneumatic system
Pneumatic system in the analysis:
The main idea was to use for each two-way cylinder 4 valves that are cross-connected. When we open the valve for filling the cylinder on one side, we open for bleeding the valve on the opposite side.
To control the valves, we decided to use such a module with 8 relays, which is enough for 16 pair-connected valves, i.e. for 4 cylinders.
Guns
The main hammer. We think and argue over the design of the main pick hammer.
As saws, we decided to use mowing engines and knives from Robomow . Firstly, the knives are made of durable steel, and the engines give a good moment and speed. Secondly, Robomow agreed to sponsor us.
Video
PS: I'm preparing the second part, we are also preparing for the competition of autonomous robotic lawnmowers .
PPS (for those who think that time is short):
PPPS: Our VK group
PPPPS: Continuation of the article
Only registered users can participate in the survey. Please come in.
We have time to complete the competition?
- 86.9% We will succeed 392
- 13% We will not be in time 59