A digital model of the brain of a nematode worm was uploaded to a robot from Lego
Modeling the work of the human brain is a task that scientists can only accomplish in the distant future (if at all). To display in a digital model all these billions of connections between neurons, as well as to model the exchange of information so far no one can do.
But this applies to the human brain. But a simplified brain model of the simplest nematode worm has already been created. An article about the OpenWorm project has already been published at Geeks , whose participants are trying to create a digital model of the worm, both the brain and the whole body.
The fact is that the nematode is a very simple organism, consisting of only 900-odd cells. The nervous system of the worm consists of 302 neurons. The interaction between individual cells and systems has long been described, so creating a digital copy is relatively easy (compared to the complexity of modeling in the figure of more complex organisms).
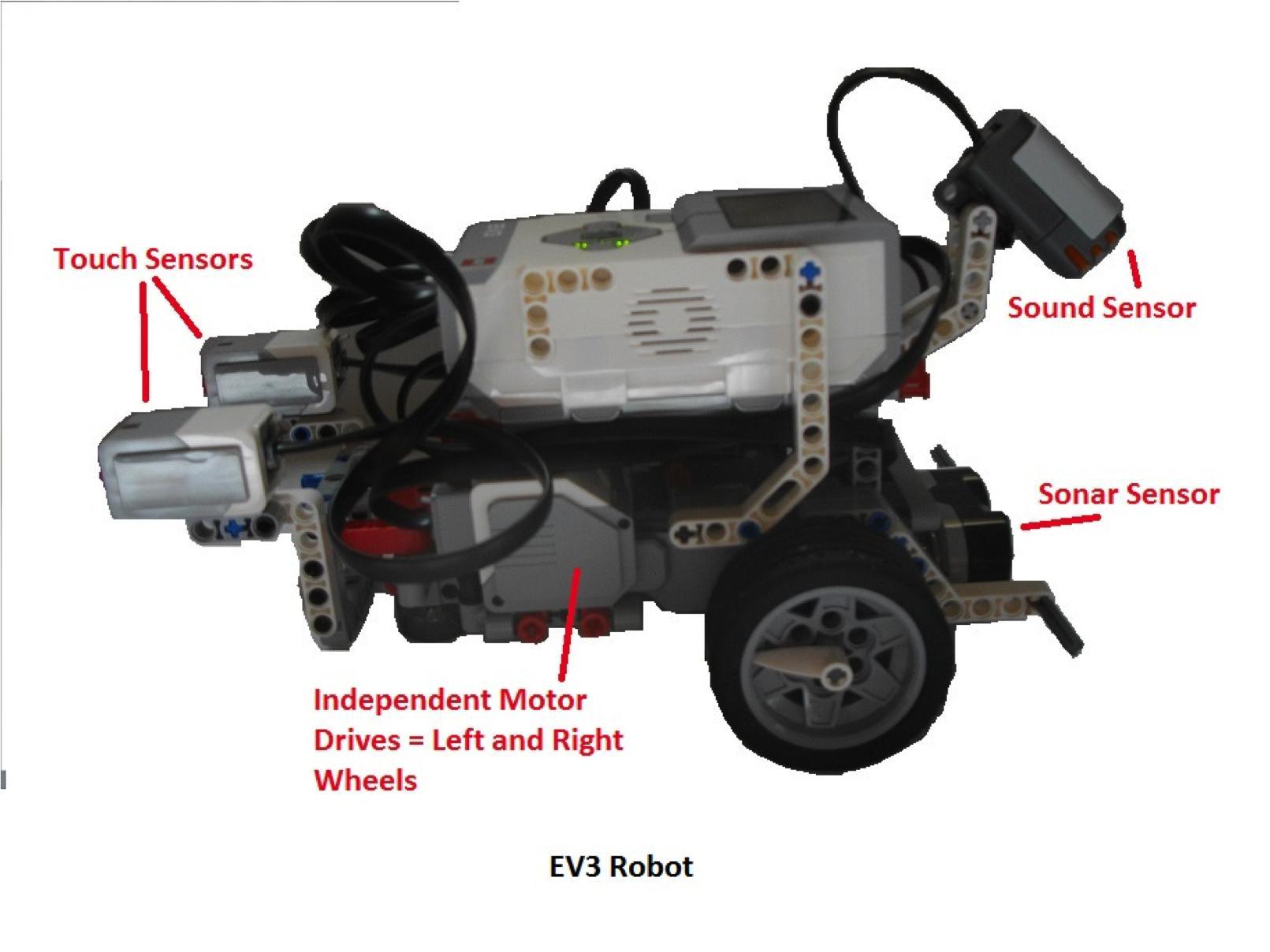
Be that as it may, scientists nevertheless managed to describe the work and connections between all 302 neurons of the worm’s brain, as well as simulate the work of the brain in a digital model. Scientists placed a digital model in a robot from Lego Mindstorms EV3 (a review of it on Geeks), all of whose elements have their analogues in the body of a real worm. So, the sonar here replaced the nose of the worm, and the servos - motor neurons in each part of the body of the worm.
Surprisingly, without any additional instructions, the robot was able to move independently, and the robot’s behavioral patterns are similar to those of a regular worm. So, the activation of the “food sensor” made the robot move forward, and touching the front or rear sensor caused the robot to move forward or backward.
It is worth noting that the brain simulation is still not complete - the scientists used some simplifications and approximations to launch a digital copy in the foreseeable time. But the fact is that even such a simplified copy was able to protect the robot from collision with obstacles (without additional instructions in the program). In addition, the robot was able to independently choose the direction of movement, which can also be called a significant achievement.