CNN Traffic Sign Recognition: Image Preprocessing Tools
Hello, Habr! We continue the series of materials from the graduate of our Deep Learning program , Cyril Danilyuk, on the use of convolutional neural networks for pattern recognition - CNN (Convolutional Neural Networks)
Over the past few years, the field of computer vision (CV) is experiencing, if not a second birth, then a huge surge of self-interest. In many ways, this increase in popularity is associated with the evolution of neural network technologies. For example, convolutional neural networks (CNNs) have selected a large chunk of tasks for generating features that were previously solved by the classical CV methods: HOG, SIFT, RANSAC, etc.
Mapping, image classification, building a route for drones and unmanned vehicles - many tasks related to the generation of features, classification, image segmentation can be effectively solved using convolutional neural networks.

MultiNet as an example of a neural network (three in one), which we will use in one of the following posts. A source.
It is assumed that the reader has a general understanding of the operation of neural networks. The network has a huge number of posts, courses and books on this topic. For example:
Tip: to make sure that you know the basics of neural networks, write your network from scratch and play with it!
Instead of repeating the basics, this series of articles focuses on several specific neural network architectures: STN (spatial transformer network), IDSIA (convolutional neural network for classifying traffic signs), neural network from NVIDIA for end-to-end development of autopilot and MultiNet for recognition and classifications of road markings and signs. Let's get started!
The topic of this article is to show several tools for image preprocessing. The general pipeline usually depends on the specific task, but I would like to dwell on the tools. Neural networks are not at all the magic black boxes that they like to present in the media: you can’t just take and “drop” data into the grid and wait for magical results. By the rule of shit in - shit out at best, you will get a score worse by a few points. And, most likely, you just won’t be able to train the network and no fashionable techniques like normalizing batches or dropout will help you. Thus, the work must begin with the data: their cleaning, normalization and normalization. Additionally, it is worth thinking about the extension (data augmentation) of the original picture dataset using affine transformations such as rotation, shifts, and zooming:
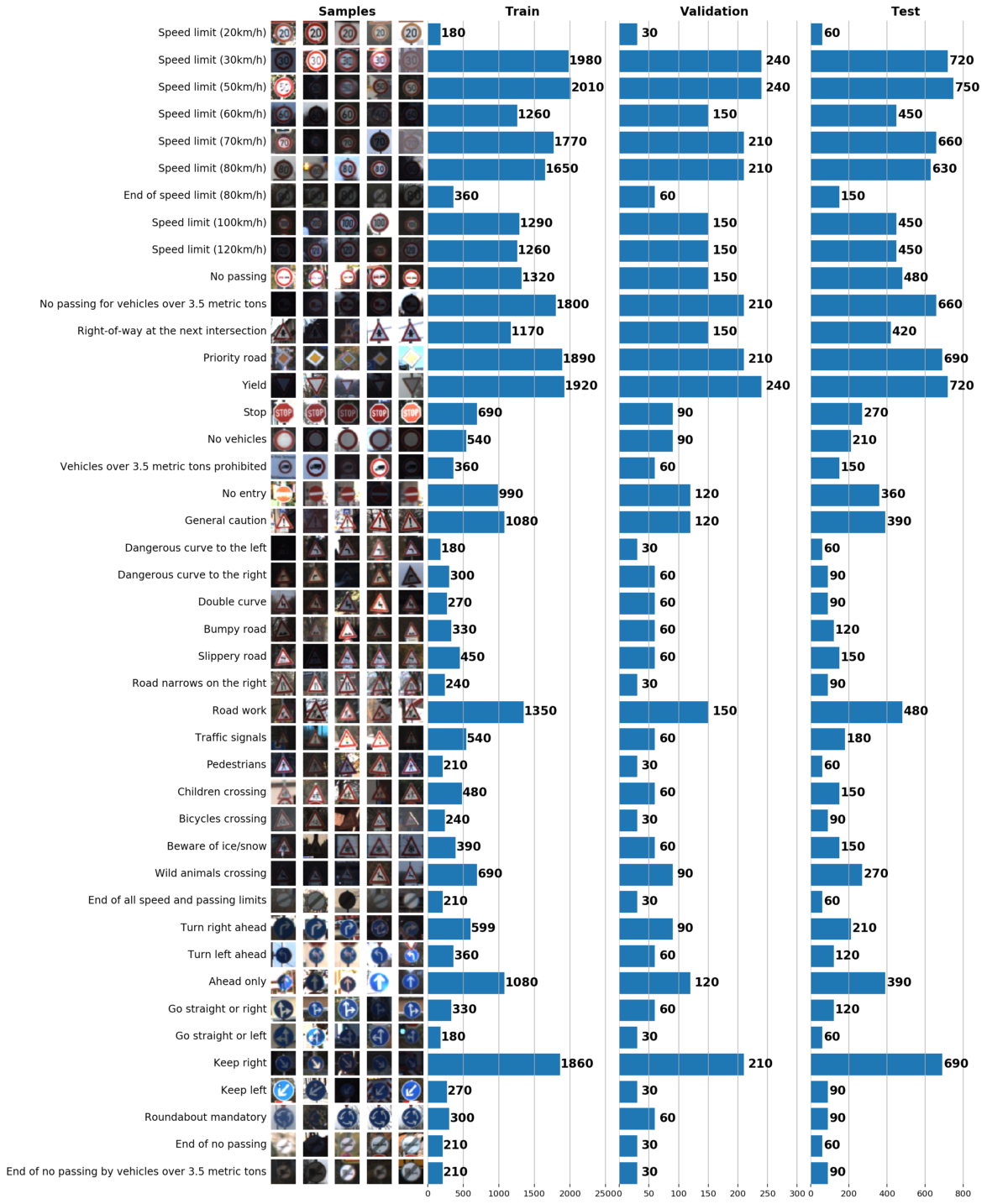
As part of this and the next post, we will use GTSRB - a traffic sign recognition dataset in Germany. Our task is to train the classifier of road signs using tagged data from GTSRB. In general, the best way to get an idea of the available data is to build a histogram of the distribution of train, validation and / or test data sets:
Basic information about our dataset:
At this stage
As a result, just one graph can say a lot about our data set. Below are 3 tasks that can be solved with a well-constructed schedule:
In order to improve the convergence of the neural network, it is necessary to bring all images to a single illumination by (as recommended in LeCun 's article on recognition of road signs) converting their color gamut to grayscale. This can be done both using OpenCV, and using the excellent Python library
I note that

Our approach to parallelization is very simple: we divide the sample into batches and process each batch independently of the others. As soon as all batches are processed, we merge them back into one data set. My CLAHE implementation is given below:
Now that the transformation itself is ready, we will write a code that applies it to each batch from the training set:
Finally, apply the written function to the training set:
В результате мы используем не одно, а все ядра процессора (32 в моем случае) и получаем значительное увеличение производительности. Пример полученных изображений:

Результат нормализации изображений и переноса их цветовой гаммы в градации серого

Нормализация распределения для изображений формата RGB (я использовал другую функцию для rc[:].map)
Теперь весь процесс предобработки данных проходит за несколько десятков секунд, поэтому мы можем протестировать разные значения числа интервалов

num_bins: 8, 32, 128, 256, 512
Выбор большего числа
Finally, we use ipython magic
It's no secret that adding a variety of new data to the sample reduces the likelihood of retraining the neural network. In our case, we can construct artificial images by transforming existing images using rotation, mirror reflection and affine transformations. Despite the fact that we can carry out this process for the entire sample, save the results and then use them, a more elegant way will be to create new images on the fly (online) so that you can quickly adjust the data augmentation parameters.
First, we denote all planned transformations using
Scaling and random rotations
Part of the conversion table. The values in the cells indicate the class number that this image will take after the transformation. Empty cells mean that this conversion is not available for this class.
Please note that the column headings correspond to the names of the transforming functions defined earlier, so that during the processing you can add transformations:
Now we can build a pipeline that applies all the available functions (transformations) listed in
Excellent! Now we have 2 ready-made data augmentation functions:
The final step is to create a batches generator:
By combining datasets with different numbers

Images generated using augmented_batch_generator
Note: augmentation is needed for a train set. We pre-process the test set, but do not augment it.
Let's check that we did not inadvertently violate the distribution of classes on the extended train compared to the original dataset:
Left: a data distribution histogram from augmented batch generator. Right: original train. As you can see, the values are different, but the distributions are similar.
After the data preprocessing is done, all the generators are ready and the dataset is ready for analysis, we can proceed to training. We will use a double convolutional neural network: the STN (spatial transformer network) receives pre-processed image batches from the generator and focuses on road signs, while the IDSIA neural network recognizes the road sign on images received from STN. The next post will be devoted to these neural networks, their training, quality analysis and demo versions of their work. Stay tuned for new posts!
Left: The original pre-processed image. Right: Transformed STN image that receives IDSIA input for classification.
Introduction
Over the past few years, the field of computer vision (CV) is experiencing, if not a second birth, then a huge surge of self-interest. In many ways, this increase in popularity is associated with the evolution of neural network technologies. For example, convolutional neural networks (CNNs) have selected a large chunk of tasks for generating features that were previously solved by the classical CV methods: HOG, SIFT, RANSAC, etc.
Mapping, image classification, building a route for drones and unmanned vehicles - many tasks related to the generation of features, classification, image segmentation can be effectively solved using convolutional neural networks.
MultiNet as an example of a neural network (three in one), which we will use in one of the following posts. A source.
It is assumed that the reader has a general understanding of the operation of neural networks. The network has a huge number of posts, courses and books on this topic. For example:
- Chapter 6: Deep Feedforward Networks is a chapter from the Deep Learning book by I. Goodfellow, Y.Bengio, and A.Courville. Highly recommend.
- CS231n Convolutional Neural Networks for Visual Recognition is a popular course from Fei-Fei Li and Andrej Karpathy from Stanford. The course contains excellent materials focusing on practice and design.
- Deep Learning - A course from Nando de Freitas from Oxford.
- Intro to Machine Learning - a free course from Udacity for beginners with an accessible presentation of the material, covers a large number of topics in machine learning.
Tip: to make sure that you know the basics of neural networks, write your network from scratch and play with it!
Instead of repeating the basics, this series of articles focuses on several specific neural network architectures: STN (spatial transformer network), IDSIA (convolutional neural network for classifying traffic signs), neural network from NVIDIA for end-to-end development of autopilot and MultiNet for recognition and classifications of road markings and signs. Let's get started!
The topic of this article is to show several tools for image preprocessing. The general pipeline usually depends on the specific task, but I would like to dwell on the tools. Neural networks are not at all the magic black boxes that they like to present in the media: you can’t just take and “drop” data into the grid and wait for magical results. By the rule of shit in - shit out at best, you will get a score worse by a few points. And, most likely, you just won’t be able to train the network and no fashionable techniques like normalizing batches or dropout will help you. Thus, the work must begin with the data: their cleaning, normalization and normalization. Additionally, it is worth thinking about the extension (data augmentation) of the original picture dataset using affine transformations such as rotation, shifts, and zooming:
Tool 1: Data Visualization and Exploration
As part of this and the next post, we will use GTSRB - a traffic sign recognition dataset in Germany. Our task is to train the classifier of road signs using tagged data from GTSRB. In general, the best way to get an idea of the available data is to build a histogram of the distribution of train, validation and / or test data sets:
Basic information about our dataset:
Number of training examples = 34799
Number of validation examples = 4410
Number of testing examples = 12630
Image data shape = (32, 32, 3)
Number of classes = 43At this stage
matplotlib, your best friend. Despite the fact that using only pyplotyou can perfectly visualize the data, matplotlib.gridspecit allows you to merge 3 graphs together:gs = gridspec.GridSpec(1, 3, wspace=0.25, hspace=0.1)
fig = plt.figure(figsize=(12,2))
ax1, ax2, ax3 = [plt.subplot(gs[:, i]) for i in range(3)]Gridspecvery flexible. For example, for each histogram, you can set your width, as I did above. Gridspecconsiders the axis of each histogram independently of the others, which allows you to create sophisticated graphs. As a result, just one graph can say a lot about our data set. Below are 3 tasks that can be solved with a well-constructed schedule:
- Image visualization. The graph immediately shows a lot of images that are too dark or too light, so some kind of data normalization should be carried out to eliminate the brightness variation.
- Checking the sample for imbalance. In the event that instances of a class prevail in the sample, it is necessary to use the undersampling or oversampling methods.
- Verify that the train, validation, and test distributions of the samples are similar. This can be checked by looking at the histograms above, or using the Spearman rank correlation coefficient. (through
scipy)
Tool 2: IPython Parallel for scikit-image
In order to improve the convergence of the neural network, it is necessary to bring all images to a single illumination by (as recommended in LeCun 's article on recognition of road signs) converting their color gamut to grayscale. This can be done both using OpenCV, and using the excellent Python library
scikit-image, which can be easily installed using pip (OpenCV requires self-compilation with a bunch of dependencies). Normalization of the image contrast will be done using adaptive histogram normalization (CLAHE, contrast limited adaptive histogram equalization): skimage.exposure.equalize_adapthist. I note that
skimage processes images one after another, using only one processor core, which is obviously inefficient. To parallelize image preprocessing, we use the IPython Parallel ( ipyparallel) library . One of the advantages of this library is its simplicity: you can implement parallelized CLAHE with just a few lines of code. First, in the console (with installed ipyparallel), start the local ipyparallel cluster:$ ipcluster startOur approach to parallelization is very simple: we divide the sample into batches and process each batch independently of the others. As soon as all batches are processed, we merge them back into one data set. My CLAHE implementation is given below:
from skimage import exposure
def grayscale_exposure_equalize(batch_x_y):
"""Processes a batch with images by grayscaling, normalization and
histogram equalization.
Args:
batch_x_y: a single batch of data containing a numpy array of images
and a list of corresponding labels.
Returns:
Numpy array of processed images and a list of labels (unchanged).
"""
x_sub, y_sub = batch_x_y[0], batch_x_y[1]
x_processed_sub = numpy.zeros(x_sub.shape[:-1])
for x in range(len(x_sub)):
# Grayscale
img_gray = numpy.dot(x_sub[x][...,:3], [0.299, 0.587, 0.114])
# Normalization
img_gray_norm = img_gray / (img_gray.max() + 1)
# CLAHE. num_bins will be initialized in ipyparallel client
img_gray_norm = exposure.equalize_adapthist(img_gray_norm, nbins=num_bins)
x_processed_sub[x,...] = img_gray_norm
return (x_processed_sub, y_sub)Now that the transformation itself is ready, we will write a code that applies it to each batch from the training set:
import multiprocessing
import ipyparallel as ipp
import numpy as np
def preprocess_equalize(X, y, bins=256, cpu=multiprocessing.cpu_count()):
""" A simplified version of a function which manages multiprocessing logic.
This function always grayscales input images, though it can be generalized
to apply any arbitrary function to batches.
Args:
X: numpy array of all images in dataset.
y: a list of corresponding labels.
bins: the amount of bins to be used in histogram equalization.
cpu: the number of cpu cores to use. Default: use all.
Returns:
Numpy array of processed images and a list of labels.
"""
rc = ipp.Client()
# Use a DirectView object to broadcast imports to all engines
with rc[:].sync_imports():
import numpy
from skimage import exposure, transform, color
# Use a DirectView object to set up the amount of bins on all engines
rc[:]['num_bins'] = bins
X_processed = np.zeros(X.shape[:-1])
y_processed = np.zeros(y.shape)
# Number of batches is equal to cpu count
batches_x = np.array_split(X, cpu)
batches_y = np.array_split(y, cpu)
batches_x_y = zip(batches_x, batches_y)
# Applying our function of choice to each batch with a DirectView method
preprocessed_subs = rc[:].map(grayscale_exposure_equalize, batches_x_y).get_dict()
# Combining the output batches into a single dataset
cnt = 0
for _,v in preprocessed_subs.items():
x_, y_ = v[0], v[1]
X_processed[cnt:cnt+len(x_)] = x_
y_processed[cnt:cnt+len(y_)] = y_
cnt += len(x_)
return X_processed.reshape(X_processed.shape + (1,)), y_processedFinally, apply the written function to the training set:
# X_train: numpy array of (34799, 32, 32, 3) shape
# y_train: a list of (34799,) shape
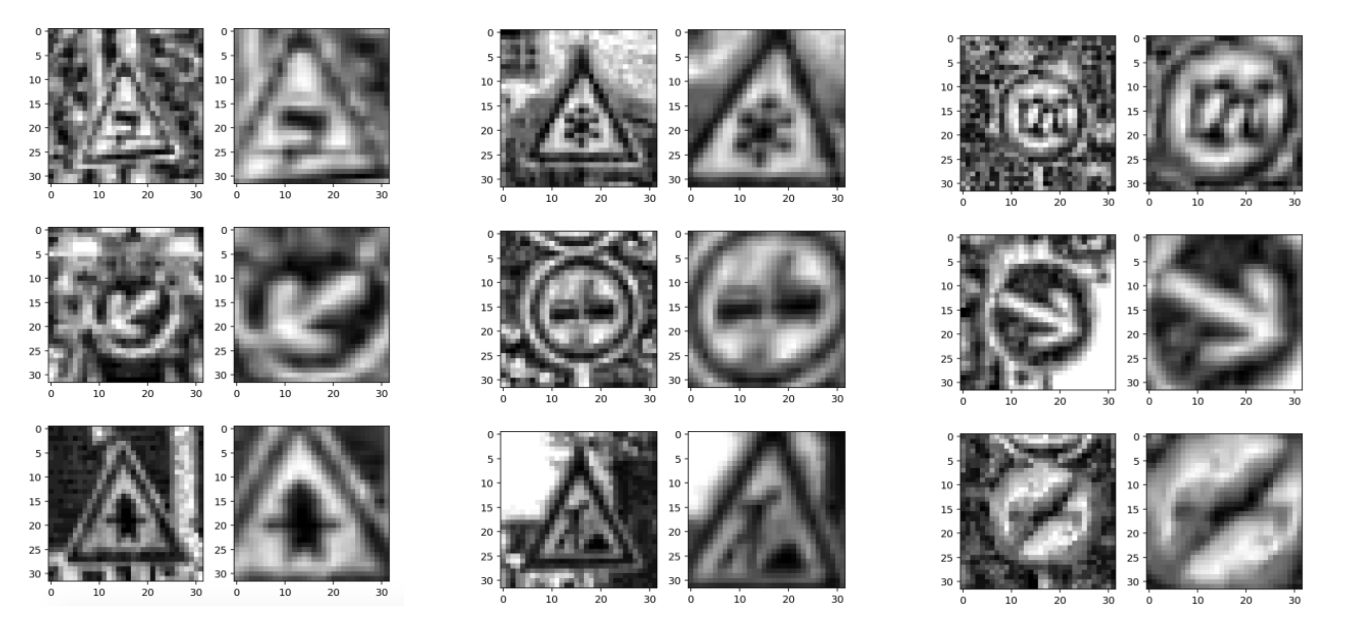
X_tr, y_tr = preprocess_equalize(X_train, y_train, bins=128)В результате мы используем не одно, а все ядра процессора (32 в моем случае) и получаем значительное увеличение производительности. Пример полученных изображений:
Результат нормализации изображений и переноса их цветовой гаммы в градации серого
Нормализация распределения для изображений формата RGB (я использовал другую функцию для rc[:].map)
Теперь весь процесс предобработки данных проходит за несколько десятков секунд, поэтому мы можем протестировать разные значения числа интервалов
num_bins, чтобы визуализировать их и выбрать наиболее подходящий:num_bins: 8, 32, 128, 256, 512
Выбор большего числа
num_bins увеличивает контрастность изображений, в то же время сильно выделяя их фон, что зашумляет данные. Разные значения num_binscan also be used to augment the contrast of the dataset by contrast so that the neural network is not retrained due to the background of the images. Finally, we use ipython magic
%storeto save the results for future reference:# Same images, multiple bins (contrast augmentation)
%store X_tr_8
%store y_tr_8
# ...
%store X_tr_512
%store y_tr_512Tool 3: Online Data Augmentation
It's no secret that adding a variety of new data to the sample reduces the likelihood of retraining the neural network. In our case, we can construct artificial images by transforming existing images using rotation, mirror reflection and affine transformations. Despite the fact that we can carry out this process for the entire sample, save the results and then use them, a more elegant way will be to create new images on the fly (online) so that you can quickly adjust the data augmentation parameters.
First, we denote all planned transformations using
numpyand skimage:import numpy as np
from skimage import transform
from skimage.transform import warp, AffineTransform
def rotate_90_deg(X):
X_aug = np.zeros_like(X)
for i,img in enumerate(X):
X_aug[i] = transform.rotate(img, 270.0)
return X_aug
def rotate_180_deg(X):
X_aug = np.zeros_like(X)
for i,img in enumerate(X):
X_aug[i] = transform.rotate(img, 180.0)
return X_aug
def rotate_270_deg(X):
X_aug = np.zeros_like(X)
for i,img in enumerate(X):
X_aug[i] = transform.rotate(img, 90.0)
return X_aug
def rotate_up_to_20_deg(X):
X_aug = np.zeros_like(X)
delta = 20.
for i,img in enumerate(X):
X_aug[i] = transform.rotate(img, random.uniform(-delta, delta), mode='edge')
return X_aug
def flip_vert(X):
X_aug = deepcopy(X)
return X_aug[:, :, ::-1, :]
def flip_horiz(X):
X_aug = deepcopy(X)
return X_aug[:, ::-1, :, :]
def affine_transform(X, shear_angle=0.0, scale_margins=[0.8, 1.5], p=1.0):
"""This function allows applying shear and scale transformations
with the specified magnitude and probability p.
Args:
X: numpy array of images.
shear_angle: maximum shear angle in counter-clockwise direction as radians.
scale_margins: minimum and maximum margins to be used in scaling.
p: a fraction of images to be augmented.
"""
X_aug = deepcopy(X)
shear = shear_angle * np.random.rand()
for i in np.random.choice(len(X_aug), int(len(X_aug) * p), replace=False):
_scale = random.uniform(scale_margins[0], scale_margins[1])
X_aug[i] = warp(X_aug[i], AffineTransform(scale=(_scale, _scale), shear=shear), mode='edge')
return X_augScaling and random rotations
rotate_up_to_20_degincrease the size of the sample, while maintaining the belonging of the images to the original classes. Reflections (flips) and rotations of 90, 180, 270 degrees can, on the contrary, change the meaning of the sign. To track such transitions, create a list of possible conversions for each road sign and classes into which they will be converted (below is an example of part of such a list):| label_class | label_name | rotate_90_deg | rotate_180_deg | rotate_270_deg | flip_horiz | flip_vert |
|---|---|---|---|---|---|---|
| thirteen | Yield | thirteen | ||||
| 14 | Stop | |||||
| fifteen | No vehicles | fifteen | fifteen | fifteen | fifteen | fifteen |
| 16 | Vehicles over 3.5 ton prohibited | |||||
| 17 | No entry | 17 | 17 | 17 |
Please note that the column headings correspond to the names of the transforming functions defined earlier, so that during the processing you can add transformations:
import pandas as pd
# Generate an augmented dataset using a transform table
augmentation_table = pd.read_csv('augmentation_table.csv', index_col='label_class')
augmentation_table.drop('label_name', axis=1, inplace=True)
augmentation_table.dropna(axis=0, how='all', inplace=True)
# Collect all global functions in global namespace
namespace = __import__(__name__)
def apply_augmentation(X, how=None):
"""Apply an augmentation function specified in `how` (string) to a numpy array X.
Args:
X: numpy array with images.
how: a string with a function name to be applied to X, should return
the same-shaped numpy array as in X.
Returns:
Augmented X dataset.
"""
assert augmentation_table.get(how) is not None
augmentator = getattr(namespace, how)
return augmentator(X)Now we can build a pipeline that applies all the available functions (transformations) listed in
augmentation_table.csvto all classes:import numpy as np
def flips_rotations_augmentation(X, y):
"""A pipeline for applying augmentation functions listed in `augmentation_table`
to a numpy array with images X.
"""
# Initializing empty arrays to accumulate intermediate results of augmentation
X_out, y_out = np.empty([0] + list(X.shape[1:]), dtype=np.float32), np.empty([0])
# Cycling through all label classes and applying all available transformations
for in_label in augmentation_table.index.values:
available_augmentations = dict(augmentation_table.ix[in_label].dropna(axis=0))
images = X[y==in_label]
# Augment images and their labels
for kind, out_label in available_augmentations.items():
X_out = np.vstack([X_out, apply_augmentation(images, how=kind)])
y_out = np.hstack([y_out, [out_label] * len(images)])
# And stack with initial dataset
X_out = np.vstack([X_out, X])
y_out = np.hstack([y_out, y])
# Random rotation is explicitly included in this function's body
X_out_rotated = rotate_up_to_20_deg(X)
y_out_rotated = deepcopy(y)
X_out = np.vstack([X_out, X_out_rotated])
y_out = np.hstack([y_out, y_out_rotated])
return X_out, y_outExcellent! Now we have 2 ready-made data augmentation functions:
affine_transform: customizable affine transformations without rotation (the name I chose is not very successful, because rotation is one of the affine transformations).flips_rotations_augmentation: random rotations and transforms based onaugmentation_table.csvchanging image classes.
The final step is to create a batches generator:
def augmented_batch_generator(X, y, batch_size, rotations=True, affine=True,
shear_angle=0.0, scale_margins=[0.8, 1.5], p=0.35):
"""Augmented batch generator. Splits the dataset into batches and augments each
batch independently.
Args:
X: numpy array with images.
y: list of labels.
batch_size: the size of the output batch.
rotations: whether to apply `flips_rotations_augmentation` function to dataset.
affine: whether to apply `affine_transform` function to dataset.
shear_angle: `shear_angle` argument for `affine_transform` function.
scale_margins: `scale_margins` argument for `affine_transform` function.
p: `p` argument for `affine_transform` function.
"""
X_aug, y_aug = shuffle(X, y)
# Batch generation
for offset in range(0, X_aug.shape[0], batch_size):
end = offset + batch_size
batch_x, batch_y = X_aug[offset:end,...], y_aug[offset:end]
# Batch augmentation
if affine is True:
batch_x = affine_transform(batch_x, shear_angle=shear_angle, scale_margins=scale_margins, p=p)
if rotations is True:
batch_x, batch_y = flips_rotations_augmentation(batch_x, batch_y)
yield batch_x, batch_yBy combining datasets with different numbers
num_binsin CLAHE into one big train, we feed it into the resulting generator. Now we have two types of augmentation: in contrast and using affine transformations that apply to the batch on the fly: Images generated using augmented_batch_generator
Note: augmentation is needed for a train set. We pre-process the test set, but do not augment it.
Let's check that we did not inadvertently violate the distribution of classes on the extended train compared to the original dataset:
Left: a data distribution histogram from augmented batch generator. Right: original train. As you can see, the values are different, but the distributions are similar.
Transition to neural networks
After the data preprocessing is done, all the generators are ready and the dataset is ready for analysis, we can proceed to training. We will use a double convolutional neural network: the STN (spatial transformer network) receives pre-processed image batches from the generator and focuses on road signs, while the IDSIA neural network recognizes the road sign on images received from STN. The next post will be devoted to these neural networks, their training, quality analysis and demo versions of their work. Stay tuned for new posts!
Left: The original pre-processed image. Right: Transformed STN image that receives IDSIA input for classification.