Drones on the ISS
In the context of what
After the emergency launch of the Soyuz, the distinguished Zelenyikot wrote an inspiring post for cosmonautics health. And here's what the comments found:
A significant number of habrovans believe that the development of astronautics is primarily the development of manned cosmonautics. So it was in the past, and so it should be in the future.
При этом многие хабровчане полагают, что пилотируемая космонавтика, в особенности работа экипажей МКС, мощно стимулирует развитие новых технологий и науки в целом. Люди на орбите делают что-то умное, сложное, и очень-очень важное. А еще больше невероятно умных людей работают в земных лабораториях, обеспечивая эти эксперименты: продумывают, обрабатывают полученные бесценные данные, создают хитрые прецизионные инструменты на грани фантастики, без которых эти эксперименты не осуществить…
Предлагаю посмотреть, как же на самом деле это все работает, — на конкретном примере.
A significant number of habrovans believe that the development of astronautics is primarily the development of manned cosmonautics. So it was in the past, and so it should be in the future.
При этом многие хабровчане полагают, что пилотируемая космонавтика, в особенности работа экипажей МКС, мощно стимулирует развитие новых технологий и науки в целом. Люди на орбите делают что-то умное, сложное, и очень-очень важное. А еще больше невероятно умных людей работают в земных лабораториях, обеспечивая эти эксперименты: продумывают, обрабатывают полученные бесценные данные, создают хитрые прецизионные инструменты на грани фантастики, без которых эти эксперименты не осуществить…
Предлагаю посмотреть, как же на самом деле это все работает, — на конкретном примере.

Summary: different, stupid, Nenashi. And a little about cosmic grooming. (+ Criticize - suggest!)
Actual part, TTX - Some analysis: what is hidden behind the TTX, how the drones target is delivered inside the orbital station, and what is their fate on the real ISS; Why is it coming out? And how could it be? Climbing into fantasies, turning into New Yorkshire
1. Review of drones
1.0. Scene: ISS
Why is the idea of drones on the ISS attractive?
Suffice it to recall the main claims to the drones, when used on the ground:
- very noisy;
- short flight time.
Both the first and second due to the fact that the drone engines have to contend with gravity. Engines are forced to work above a certain power threshold (otherwise the drone will simply not take off). Electric motors quickly eat up the battery; loaded windings and screws whipping the air at high speeds create a sharp and strong sound.
On the ISS, where there is no gravity, the engines can operate as poorly as desired. You can very economically spend battery power; there is no strong noise.
Moreover. Since the ISS itself is quite a noisy place (forced ventilation, a lot of racks with constantly working equipment, life support systems and maintaining station orientation - total consumption is about 50 kW), the drone, with moderate engine operation, although formally sounds and produces, but in practice purposes can be considered silent. It will not be another annoying sound disturbance for people at the station.
1.1. Spheres (USA)
According to the passport, with the game in acronyms: SPHERES (Synchronized Position Hold Engage Re-orientient Experiment Satellites). NASA Property. Created at MIT for a DARPA grant.
Weight: 4.3 kg.
Size: 22 cm.
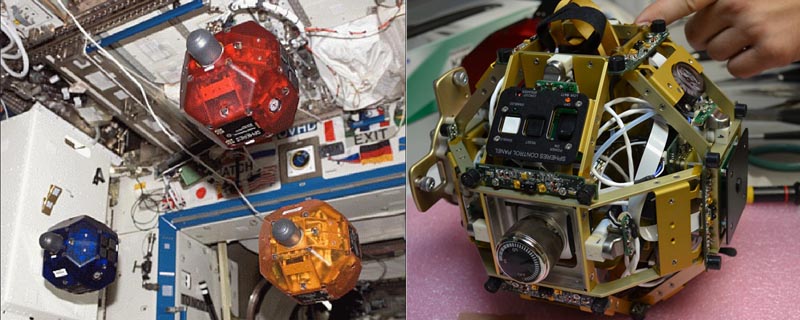
(Sources of graphics: NASA, JAXA, ESA.)
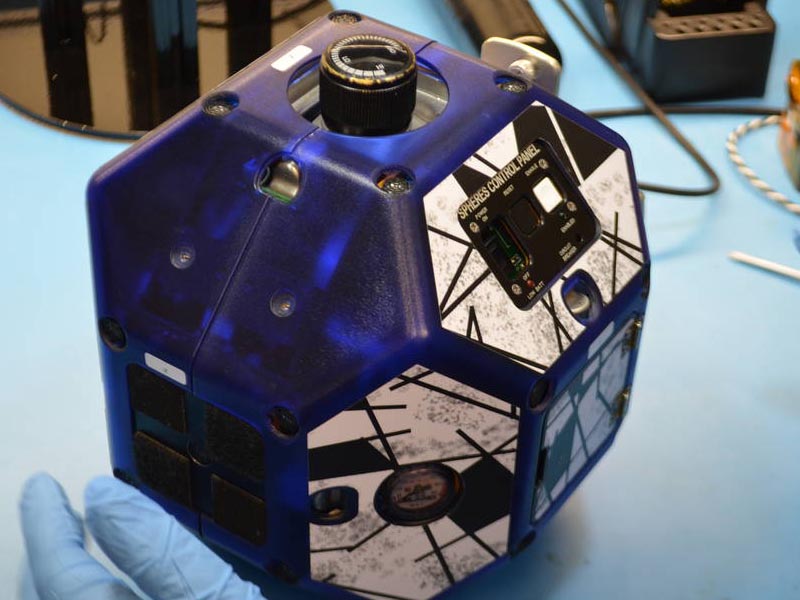
Several identical drones, of which three have fallen into orbit: Blue, Red and Orange. First Blue, back in 2006. A little later, the rest, with improved firmware.
These are not exactly drones in the sense that we invest in “drones” on the ground, meaning primarily amateur (quad) or professional (hex, oct) copters. Spheres are not copters. They have no screws, and nozzles. Purely jet motion, on compressed gas.

The cylinder is charged at 170 gr. From it, the gas is distributed to 12 nozzles. Maximum acceleration: 17 cm / s 2 in motion, 3.5 rad / s 2 in rotation.
But it is precisely that maximum accelerations, in normal operation, accelerations are not nearly as close. In real experiments, the Spheres move about very slowly .
Full communication: radio channels at frequencies of 868 and 917 MHz.
Alarm: infrared signal.
Sensors: ultrasonic receivers.
There are no video cameras, but attachments for body cladding are provided. At first, the VERTIGO block was used as a video camera, the base of which was two cameras to create a stereo image. Then, when smartphones spread, just a smartphone.

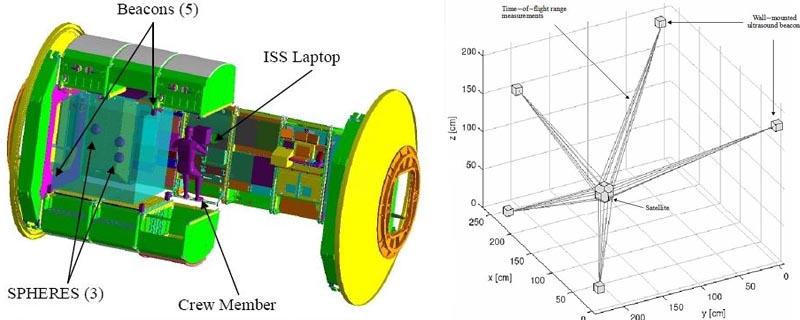
Initially, the navigation was on ultrasound receivers. These are not even distance sensors, they themselves do not emit ultrasound. To do this, inside the American laboratory were fixed 5 beacons. When you need to determine your position, the Sphere gives an infrared flash. This is a signal for beacons. They take turns, with different delay, give an ultrasonic signal. The sphere catches these five signals. The initial different delay is needed so that the signals are guaranteed not to overlap each other, and the analysis is as simple and reliable as possible - so the beacons do not even have different signatures. The actual time of arrival of the signal allows us to calculate the secondary delay associated with the distance from the sphere to each of the beacons.
Everything is as simple as possible. It is possible, because the students, whom their supervisor took poorly, began to develop, recallingan episode of the famous children's film .
The developers considered the most vulnerable place to be the electronic part of drones - due to cosmic radiation. But the drones spent more than ten years at the station, and the problems went with the gas distribution system to the nozzles. However, it turned out that it was already on the ground, while repairing Blue, launched on the "Dragon".
Similar symptoms, not so serious, overtook Orange, but so far it remains at the station.
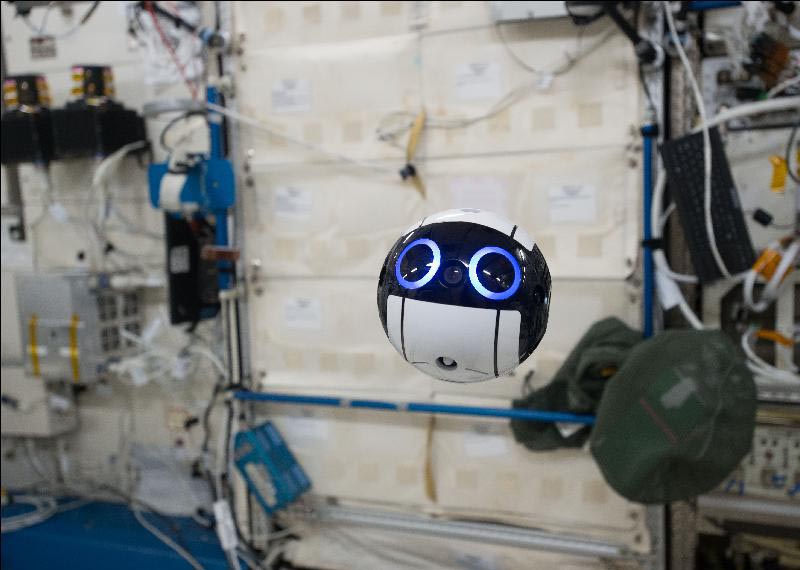
1.2. Ball (Japan)
Int-Ball (Internal Ball Camera). JAXA Property.
Weight: 1.4 kg.
Size: 15 cm.
This flying mimim was delivered to the ISS in the summer of 2017, but they began to be seriously used only a year later, when the station was a Japanese astronaut. However, formally and now the status of the Ball is still under tuning.
To move his 12 tiny vents. But for rotation - there is already a block of hirodin.
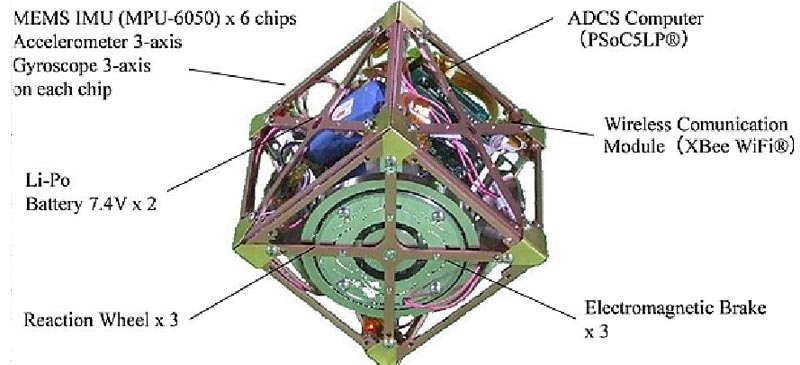
There is a direct, without crutches (like the Spheres), wireless connection to the station's laptops.
You might think that there are video cameras in the eyes, but no.
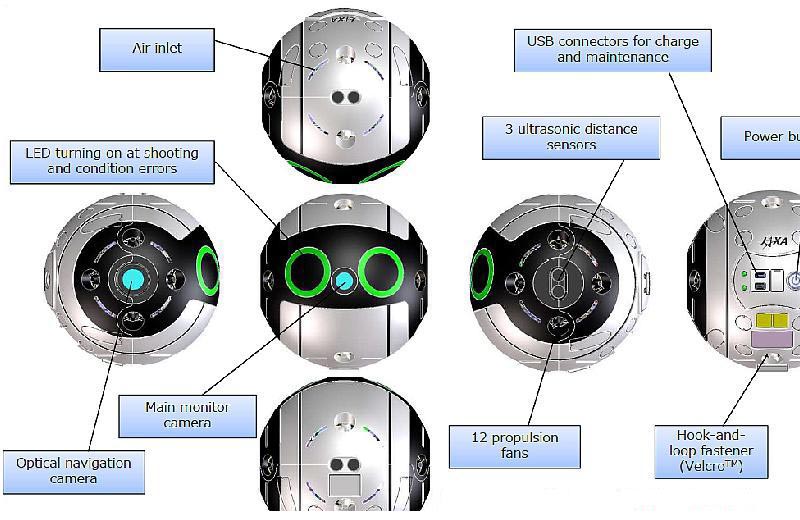
Home video camera in the nose. The eyes are just indicators. In fact, they are gray. When they glow blue - this is a signal that the main camera is working. In the event of a system failure, they light up red, and Sharik’s view becomes unexpectedly aggressive.

Already walking bike, that the first time Ball scared did not expect such an American astronaut.
From the starboard side there is an auxiliary camera, navigation. For her, in the Japanese laboratory, we put two markers (that vigorous pink rose). Usually they are at different ends of the module, one under the threshold, the other on the lid of the mini gateway, but can be moved freely.
On the left side of the Ball are ultrasonic distance sensors.
In connection with fashionable fad, it is emphasized that the details of the case were printed on the printer. (And then they were polished and polished for a long time, there are no miracles.)
Sharik did not work in offline mode yet. His movement is controlled by two operators in the Japanese MCC.
The video diary is updated once a month .
1.3. Simon (Europe, specifically Germany)
CIMON (Crew Interactive Mobile companion), in honor of Prof. Simon wright. Under the auspices of the ESA, done by the German Center for Aviation and Aerospace at the German facilities of Airbus, with the participation of IBM.
Weight: 5 kg.
Size: 32 cm.

Delivered to the ISS by the "Dragon" this summer.
No detailed description has been provided yet, there are only the most general data: 14 screws. On the nose of the monitor and video camera, on the sides of the two more auxiliary.

Linux system. IBM made a portable version of Watson 's, which does not require dozens of servers to work, nor is it connected to the ground.
If suddenly you decide that the “drones with“ IBM's from IBM! ”Can maneuver normally, and now at last it looks a little awesome - then this is his shooting on air slides. In the first test, it turned out that his calculated abilities to maneuver were weaker than the remnants of non-inertiality at the European flying laboratory (proudly referred to as ZERO-G).
It was planned that in October the German Alexander Alexander Gerst would begin work with him, voice and face recognition were imprisoned for him. And in the winter Simon will be lowered back to the ground. But, apparently due to the infection of the station with vicious gremlines , the dates have shifted. About the beginning will be found on Twitter Gerst .
2. Analysis
Well, for what is the drones on the ISS?
There are ceremonial statements by the creators, there are press releases from agencies, but it is clear that for the most part this is all bureaucratic idle talk, where prospects are inflated, like a frog through a pipe, and uncomfortable questions are swept under the carpet.
2.1. What are the Spheres for?
First of all, let's try to understand: is the design reasonable?
Inside the ISS there is air. But the spheres thrusters use the purely reactive principle. This means that when a drone is operating, there is a resource that is constantly wasted. The logical question is: how is this resource replenished? Maybe you can refill the drone directly on the ISS (that is, from a practical point of view, no resource is spent)? Maybe, along with the drone, some compressor was delivered to the ISS? Not. The drone uses replaceable cylinders with liquefied carbon dioxide. After using them in the drone, they must be lowered to the ground, filled there, and raised again on the ISS.
Moreover, even the electric power of the drone is not on the battery, which would seem obvious, but on batteries. AA disposable batteries, two units of 8 pieces. Change to fresh each time before use, approximately should be enough for 2 hours. After that, they can only be sent to the ground, and the drone needs fresh ones.
How can you justify such a strange decision?
Maybe the idea was that although the drone will work inside the ISS, it simulates the movement outside it, in a vacuum? Where there is no air? Or maybe even intended in the event of a depressurization of the ISS? Then he could move inside the station in a vacuum, as the drone on the screws could not. This could be useful. The standard way to search for a leak is by sound, but this method only works if the leak is tiny and the air leaves slowly.
But the creators themselves say that the drone is not intended for use in vacuum.
Then, maybe, we will find the reason in experiments in which these drones were used?
Experiment Rings

Two Spheres, each is added to the body kit with inductors (Ring). In this form, drones can magnetically interact - repel, attract, mutually twist each other. Contactlessly recharge each other.
What is the idea. The reason for completing most (successful!) Space missions is that they run out of fuel. The device has completed its basic program, and is still perfectly functioning, it could serve and still serve - only in the engines there is no more fuel. To correct the flight path is impossible further. Worse, it is impossible to unload the gyrodynes, and the device can no longer maintain the orientation of the antenna on the ground and the panels towards the sun - the connection to the ground, power supply is lost ... Is it possible to do without regular consumption of propellant? If you arrange several such "rings" (for example, on the surface of the ISS), then you can drive a small satellite as much as you like between them without spending any fuel at all - enough power supply, which is usually not a problem.
At the level of common words, this is all fun. But it is difficult to imagine a real use case - where and for what practical purpose can this be needed?
In addition, the experiment itself, as it was conducted, is completely useless, so elementary things were done in it.
What does this give? What was it for?
Vertigo Experiment
Since 2008, proposals and attempts to upgrade Spheres begin, so that their navigation is not based on beacons, but on video analysis. In 2010, the project takes on the financing of the same DARPA, including these here are points for the drone. It seems to be an obvious and useful idea - to work in the three-dimensional version with the fact that in the two-dimensional version, prototypes of automotive autopilots are now being made. Also taken before this topic became a boom.
But it is on the one hand. And on the other - the implementation of the drone in the form of a Sphere is the least suitable for this.
Even if you close your eyes to the fact that the Spheres are terribly slow, what about the fact that the start of the flight requires spending human time (check the pressure in the balloon and replace if necessary; replace sets of batteries with new ones), and the flight time is very limited (frequent change of cylinders and batteries, and with delivery from the earth)?
"Experiment" Halo

In quotes, because the project is that a bumper is attached to the drone, on which you can hang something else.
It would probably make some sense - if the drone could be used as a regular drone inspector even inside the station. But Spheres cannot be used like this, not those TTX. So why then is this all?
But for what. For example, “docking stations” were hung on body kits, and drones were docked with one another. Is not a miracle?
Or another: two drons were tied with a string, and they watched how one could pull the other. And it turns out that this is an imitation of the capture of space debris. Amazing Is not it so?
Plesk experiment (Slosh)

To a special beam, two Spheres are attached at the ends, and in the middle is a transparent cylinder, partially filled with liquid.
Spheres are used for twisting, shaking, vibrations, etc. The camera next to the cylinder removes what happens inside. Different degrees of filling were used, and liquids with different properties.
It is clear that, first of all, this is an analogy of what can happen in fuel tanks when they are in a state close to weightlessness. Therefore, the experiment is carried out with the participation of real major manufacturers.
In general, this experiment looks the most convincing of all the others. What makes all the same use reservations? The design with a beam and spheres as its accelerators is an extremely clumsy thing. The work of the spheres thrusters, especially with the passage of time, is far from precise. Using the Spheres as part of the installation imposes on the experiment and strict limitations on the duration, they cannot be maintained for a long time and in an automated mode (sessions with Spheres - a couple of hours in a few weeks). It seems that if in such experiments there was a real interest, then a place in the racks would be allocated, and a small shaker unit would be installed there, sharpened for such experiments. And if there was no place in the racks, then even then: was it not wiser to make a frame with gyrodynes around the balloon than to attach long ends,
That is, doubts about the necessity of the Spheres for such an experiment remain. And supported by the fact that all the following models of drones for anything like this did not try to use.
So why were Spheres needed?
To let students experiment - and their experience and interest in going into the space sector is more important here than the real benefits of specific Spheres on the ISS?
Or, plunging into sticky conspiracy, just the opposite: DARPA funded this project to confuse the gallant Russian and Chinese military? Like, look, what helpless prototypes of the satellite-inspector are coming out ... We would have been cool satellites-inspectors - would we have financed such a hug-and-cry? We have no satellite inspectors!
Or is the fact that extra bureaucrats at NASA and DARPA, which do not bring real benefits, are forced to create the appearance of work in order to justify their existence? Is it all just “mastering” the funds? And at the same time, the formal filling of the astronauts' work schedule - “it’s not for nothing that we carry them back and forth”?
2.1. Why do I need a ball?
Here the goal is stated immediately, very clearly and very convincingly.
Let's look at how the experiments are organized with the participation of people on the ISS.
The man, still on earth, teaches a work plan, trains. But! Since people are abandoned on the ISS for half a year, and there are not many of them, it is impossible to make the astronaut perfectly prepared for each of his experiments, and did it with the skill of a laboratory assistant who has worked with similar equipment for years. And it is required to do an experiment more or less quickly, without being stupid, there is a schedule. Therefore, almost every experiment takes place under the supervision of the MCC. The astronaut installs a camera on the bracket, aiming at the place where he will work. And in the MCC can not just answer his questions, - but also immediately correct, if he already does something wrong, without noticing it himself.
Of course, a stationary camera on the bracket is not ideal. Sometimes you want to show a picture close - the fact that under his fingers. Sometimes this is really important. The experiment can be moved or canceled, but in the case of the prevention or repair of life support systems, there is nowhere to go, and an error can lead to great difficulties. Therefore you have to call someone from the crew for help: one is working, the other is holding the camera, taking it off from behind the shoulder.
The Japanese claim that it takes up to 10% of the time to mess around with cameras.
Here, of course, it’s not completely clear if this statement is not crafty - they considered the astronauts inside the working hours, or included everything they could: astronauts in their free time like to take pictures in the windows; it is considered a good form for everyone to record their video tour of the station, at least once per expedition; We need to lead vlogs and participate in video bridges, because this is required of them for popularization / for political image reasons. So in reality, the percentage of time may be different.
But this does not change the essence: why not free this time for something really useful?
The ball is declared as such a universal mobile camera, which should save this time.
Does the drone work like that in reality?
A rather mediocre picture comes from Sharik (compared to full-fledged cameras with good lenses that are mounted on the ISS to the brackets). And what other picture can come from a compact camera with a tiny lens?
Mobility is even worse. Restrictions on ball speed, obviously, are associated with reinsurance, the power of the screws is underestimated specially. This may be changed in the future if the software part (navigation through the image and maneuvering) is reliable and effective. But just with this is a big problem. If we take similar “terrestrial” technologies as the starting point, what is being done in the field of automotive autopilots, it seems that these specialists and developments were not involved, and everything at JAXA is done from scratch, almost novice in this field.
However, the biggest problem is not even that. Let's say Sharik is able to confidently recognize the environment, and precisely maneuver in it. Is this enough for the drone to become an assistant operator - like, say, another crew member with a camera?
The owners of drones are well aware of the answer. Autopilot performs well when it has a clear task: checkpoint trajectories are entered, or a leading object is set. In the case of a car, this usage scenario is quite convenient. In the case of drones, more is needed - interaction with the operator as the flight task is refined, including landing conditions that were not specified in advance (remember all the funny stories of drones that were not given to the owner through tears).
For the drone assistant on the ISS (assistant in reality, and not by the press release), interaction with the person will be required first of all. Convenient interaction. Not superficially, at the level of clear verbal commands or formally prescribed gestures as a traffic controller. And the way it happens in the case of two real people doing something together. You anticipate other people's actions and intentions at the beginning of the gesture, according to where the eye is directed, as a rewarding order there can be just a quick look, and other mimic-behavioral reactions that are obvious in a real situation, and extremely difficult to formalize.
But in order for this to become a reality, the drone must be equipped with a very quick-witted AI - capable not only of maneuvering, but of understanding what is happening. Otherwise, its use will not be a help, but another challenge that the astronaut will have to keep in mind in parallel with the main work. There will be only an extra load, irritation, errors.
The development of such an interaction is now in the most embryonic state, primarily because in such a state the development of a strong AI. Without creating a strong AI, this task may at best have an ersatz solution similar to the current automated translators — a misinterpretation with errors that needs to be corrected by a strong AI in the form of a person. Without a strong AI, an assistant drone will need to be constantly monitored one way or another - and regularly interfere with its actions! - to operators on the ground.
2.3. And here is Simon!
Apparently, the developers of Simon understand this. They also understand that from an economic point of view, the scheme that the Japanese use with Sharik - at least two permanently employed specialists on earth to save 10% of the time of one cosmonaut - is at best a tower on a tower.
Therefore, the goals declare others.
Simon will simply unobtrusively follow the owner, be his voice assistant, plus collect data for a psychological analysis of the state of the crew.
I.e. It is proposed to take a technology already implemented in earth drones. Then give the astronaut in orbit an artificial (read, stupid) voice assistant - when the astronaut in the earpiece already has live assistants in the MCC. And as a cherry, to make a passive version of what is being done on earth in active form, by much more sophisticated methods in projects like Mars 500. If this is not a big step for all of humanity, then what is it?
Despite all this, there can still be a real benefit from Simon. Only not related to all of the above, not obvious to the compilers of press releases.
2.4. Space Grooming
If you watch videos from the ISS carefully, paying attention to the astronauts' behavior, you can notice a funny thing - it’s not at all obvious in advance, even if you know physics well and understand what weightlessness is.
The empirical fact: a person in weightlessness is easier to deal with large massive things than with small and light.
Difficulties begin when you let go of the little thing.
It would seem, what's the problem? Well, just put the thing in the air and it will hang there. Weightlessness! Is it not more convenient than on the ground, where a thing can fall, and before you let go of anything, you need to find some kind of reliable support on which you can put it?
The problem is that a person cannot “put” a thing in the air with sufficient accuracy. On earth, we are used to putting things on different surfaces, but always with gravity. Let go - and the force of gravity presses to the surface, and the force of friction does not allow to move sideways. There is an illusion that the person himself can so accurately leave things at rest, because he ideally controls his movements and applied force.
In weightlessness, this illusion quickly disperses. It turns out that if a person wants to “put” a thing in the air, as he put it on the table, it doesn't work that way anymore.
Even if a person tries very hard to leave the object stationary in the air, releasing and withdrawing his hand with extreme caution, the object still moves with a small residual speed. And if a person lets go of some small thing, without special attention ... At first glance, the speed of a thing is not so significant. But it is constant, and will not disappear anywhere. And in just a few seconds it turns out that the object goes beyond the limits in which the astronaut can reach, simply by stretching out his arm. And some solution is required. Either let things go, but then you have to fly behind her with your whole body, and not just move your hand - or you have to grab the thing right now and return it. (For example, the grooming of the tablet - the attention is not on the speaker's face, but on his hands.)
The best thing is to just hold and never let go. But if you want to interact with multiple items at the same time?
You cannot leave one of the items hanging for more than a few seconds. You constantly have to go back to this item and “shift” it, floating away, back.
And if the object is a tablet, on the screen of which you are watching something, and its camera has to shoot you, the problem is aggravated by the fact that, in addition to residual speeds, there is also a residual rotation speed. The tablet will not just float away slowly, but slowly turn away from you.
All this leads to the fact that the astronauts either hold in their hands what they are working with, or are engaged in space grooming — they constantly correct objects left hanging in the air.
Many fans of astronautics, even after looking at a fair amount of rollers from the ISS, do not notice: almost all of the items on the station are with dad-and-fly stickers. And pieces of sticky mom here and there on the “tables”, “benches”, the walls of the station, some of the modules are completely covered with it. In addition to Velcro, at the station here and there pockets of rubber mesh. And something cling to the snap hooks. For laptops and cameras brackets. All this is for the same purpose - to somehow solve the problem of cosmic grooming.
And in this sense, Simon has a unique useful function: it can be used as a screen that can be “put” in the air. Then Simon himself will hold both the position and the direction of the screen (and the camera) on the astronaut. He doesn't need grooming.
The question is, was it worth it to send a weighty and voluminous object - and not a small compact drone, to which you could just attach a tablet?
2.5 The main problem of drones on the ISS
Drones are simply not needed on the ISS - there is no task for them.
More precisely, tasks could be found for them, but to solve these problems, drones should not be a toy like “cram all fashionable, fit anything”, but honed to perform a specific function.
3. Beautiful drones of the future
Of the real tasks for which drones could in principle be useful on the ISS, now there are two:
1. Remove the work of astronauts,
2. Rid people of space grooming.
If you seek a solutionSpecifically, these tasks right now - you need to use what can work right now , and work effectively, completely solving the stated goals. And not to do something unintelligible, justifying the fact that "we are developing approaches to technology, sometime in the future ..."
3.1. Development offers
Now and in the near future, drones on the ISS should not :
- seriously rely on the rudiments of AI (because they are too primordial);
- use video recognition for navigation (not debugged to the end, and redundant in a closed environment, where everything is controlled);
- to weight the construction with useless analogues of specialized devices already available on the ISS in the best quality (no embedded cameras, no embedded tablets, no processors in excess of the minimum device controllers).
The drone should only be the actual working tool - a block of gyrodynes, fans, a battery, a wireless connection, and that’s all. (The maximum is a few of the smallest smartphone-type cameras, and only so that their video stream is thrown across to the processor unit in the rack, processing is only there.) And all the details are as miniature as possible. If the previous drones had the dimensions of a basketball sword, a handball, and a small beach one, then the ideal ISS drone should be much smaller, aim at the size of a tennis ball.
I.e:
The processor capacities are moved to one of the scientific racks so that the drone does not carry this huge extra load (do not forget that besides the computational module itself, the drone is forced to carry more power for this module!).
To navigate using the original Sphere scheme, but in an inverted form : the drone itself gives signals as two beacons (from the right and left sides), these signals are read by detectors fixed in the corners of the station modules, and triangulated by delay; together with the internal data of the drone — acceleration sensors, operation of electric motors and gyrodine rings — this is enough to determine both the position of the drone, its orientation, and their derivatives.
In paving a route, a ready-made model of the environment is used (ISS is a large object, but quite observable), marked up with pens and updated if necessary by the operator, without playing image recognition from a video signal. To control the environment, a picture is used with the camera fixed (not on the drones) in the module where the drone is now - and this control is carried out by the operator. Neuroalgorithms, if used, are only used to solve low-level auxiliary tasks, for which they are already good enough.
The drone itself processes information to a minimum. Only dumps its internal data on the computer in the rack, and from it receives specific instructions on the operation of the equipment.
There are mounting points on the drone. Different types. These are electro-controlled latches (the complimentary part of the latches is attached to the object that the drone should use), and just a standard piece of sticky mother for the station (in weightlessness, and this is enough to connect the drone even with a rather massive object). In any case, it should be the minimum mount, much smaller than the huge excess bumpers of the Spheres.
When a video of a working cosmonaut is required, a video camera is attached to the drone - a regular large camera / camera, which is on the ISS. The drone slowly tows it and turns it when the MCC needs to change the viewing angle of the cosmonaut’s workplace. The necessary maneuver is calculated on the ground / on the rack computer, the drone itself receives only elementary orders for the engines.
In order for an astronaut to be really a relief, and not an extra headache, in a scientific rack where space is allocated for the drone's processor unit, space must be allocated for its dock - so that parking and recharging, as it has long been done in vacuum cleaners. And it is better that the drone is not one, but with the ability to work as a carousel: from the astronaut's point of view, the drone looks always charged, only occasionally a copy of the drone appears next to the working drone; .
In addition to working as a videographer, such a design will make it possible to use the drone to combat grooming.
Like a camera, a drone can hold the position and orientation of a smartphone / tablet stuck to it; tow this screen behind the host; compensate for the return when the astronaut pokes at the tablet screen, without holding it with another finger. Or, during repair work, “keep” a working string bag / a small “table” in the air, with velcro and magnets for small items and fasteners, close to the astronaut as convenient for him - eliminating the need to straighten a tangled string bag each time, or remove the necessary thing from a carbine on a belt, and then to fasten there, and so on.
That is, it should be just a universal hold-in-the-air for other things. Not a carrier for some abstract "scientific devices", but for those items that are actually and constantly used at the station in everyday life.
And with the further development of this approach:
It is better to imagine not even a pair of drones working in shifts with one thing near one of the astronauts - but a whole swarm of them at the station, working on the carousel. Several instances reside in each module of the station, ready to operate without special initialization procedures. In the background, they begin to push them to zatomrozili and not rotate, objects near the astronaut, if these objects are released from the hands, but not stuck to the wall by velcro / not fixed in any other way, and the person’s attention is explicitly distributed among several such objects.
3.2. What's next - in reality?
The order in which drones appeared on the ISS, in miniature, reflects the level of technological development of countries. The leader does something, then the rest are tightened, who are able to compete: first, the United States, then, with a strong margin, Japan, Germany ...
It is clear that the emergence of Russia, even in this miniature race, should not be expected.
Then it turns out that now is the US turn again? Taking into account their experience, looking at the attempts of partners, now NASA should withdraw this race to a new technological revolution?
Apparently, something is really planned there. At least, NASA conducts a kind of brainstorming, announcing public contests on different hackathons.
Unfortunately, the solutions offered at such contests turn out to be spoiled by erroneous stereotypes about what conditions, problems and tasks exist on the ISS. Concepts are made diligently, but thoughtlessly, according to the principle “let's blind everything into the drone that we can, and suddenly it will be useful for something?”, Here is a typical example .