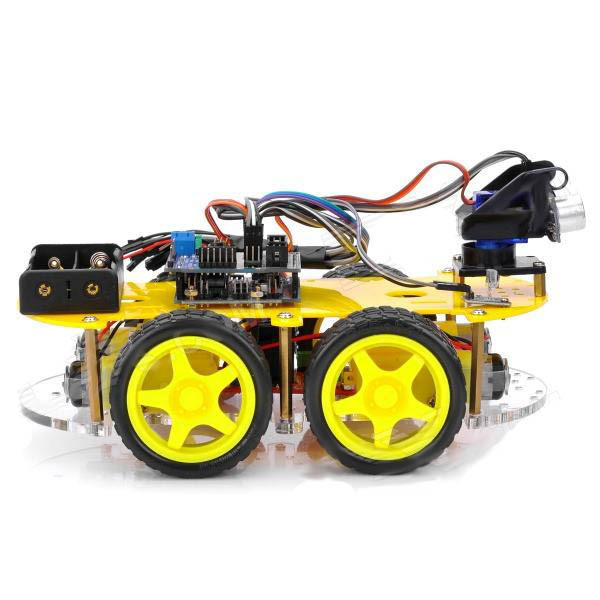
Robotale: a radio-controlled machine with Arduino and Bluetooth that will help you learn the basics of working with Arduino and not only

Learning the basics of electronics (and indeed learning) is best done online. Do not just memorize rules, schemes, etc., but immediately try what you have learned in practice. And such an opportunity presents a radio-controlled machine with ARDUINO and Bluetooth.
The roots of the device are Chinese, in the English-language manual, not even all the hieroglyphs are removed. However, this is a very interesting project that can teach a lot. The fact is that both hardware and software can be changed here, with the addition of new modules and add-ons for software.
What is Robotale?

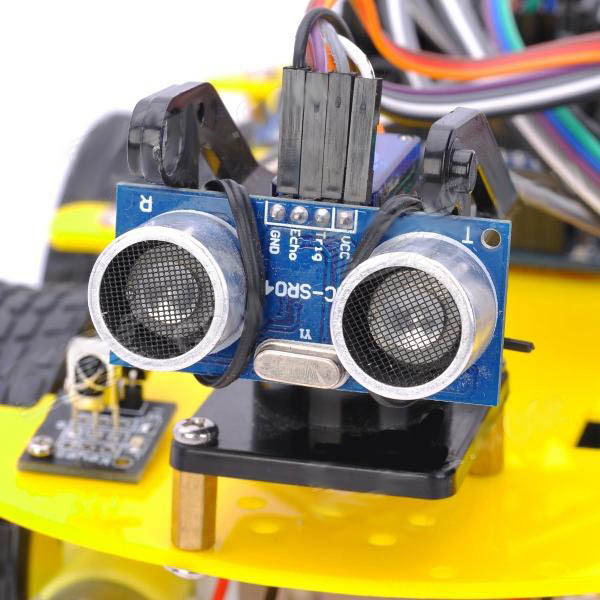
Developers position the project as a training and development electronic system, based on the Arduino microcontroller atmega-328 core. In addition, there is a Bluetooth module, an infrared module, sensors that help the device avoid obstacles. Included is a range of programs for controlling the device, and an expansion board that allows you to install additional modules, adding functionality to the device.

Device specifications
- Electric motor: 6-9V (4 pieces, 1 for each of the wheels);
- Four wheels
- Motor mount;
- 2 plexiglass boards;
- Control board L298N;
- ARDUINO UNO328;
- Expansion board with sensors;
- PTZ
- Servo;
- Ultrasonic module;
- Infrared Sensor
- Remote control;
- Adapter;
- Bluetooth module.
Screwdrivers, screws, a USB cable are supplied with the device.
How it works?
The machine comes disassembled, so you have to assemble it with your own hands. Despite the abundance of parts, the assembly is quite simple, and the child will also cope with it (although this requires some experience with a screwdriver and, sometimes, soldering). Already at the initial stage, a person assembling this car from separate parts will be able to understand how all this works and interacts.
After everything is assembled, on the PC or laptop from which the device will be controlled and the software finalized, you need to install the control program for Arduino Uno.
If desired, the set of hardware and programs can be changed and supplemented - here only the desire and the opportunity (experience) play the role of this desire to realize. The Robotale kit is an advanced electronic designer that can be used by both children and adults. Of course, working with Arduino is not so simple, but the more interesting it will be to learn, in the process of assembling the machine and connecting additional modules.

For example, you can add a Bluetooth module, and teach the car to understand the commands that are transmitted wirelessly. By the way, in this device, when pairing with a Bluetooth gadget, you need to enter the pairing code "1234". After that, you can try to manage.

For example, you can make sure that when you click on the letter “R” on the keyboard of a mobile device or laptop (a device paired with a typewriter), the red pin13 LED flashes. This can be achieved using the following program section:
The code
char val;
int ledpin = 13;
void setup ()
{
Serial.begin (9600);
pinMode (ledpin, OUTPUT);
}
void loop ()
{
val = Serial.read ();
if (val == 'r')
{
digitalWrite (ledpin, HIGH);
delay ((500);
digitalWrite (ledpin, LOW);
delay (500);
Serial.println (“keyes”);
}
}
int ledpin = 13;
void setup ()
{
Serial.begin (9600);
pinMode (ledpin, OUTPUT);
}
void loop ()
{
val = Serial.read ();
if (val == 'r')
{
digitalWrite (ledpin, HIGH);
delay ((500);
digitalWrite (ledpin, LOW);
delay (500);
Serial.println (“keyes”);
}
}
And then:
Code No. 2
// *********************************
int MotorRight1 = 5;
int MotorRight2 = 6;
int MotorLeft1 = 10;
int MotorLeft2 = 11;
void setup ()
{
Serial.begin (9600);
pinMode (MotorRight1, OUTPUT); // Pin 8 (PWM)
pinMode (MotorRight2, OUTPUT); // Pin 9 (PWM)
pinMode (MotorLeft1, OUTPUT); // Pin 10 (PWM)
pinMode (MotorLeft2, OUTPUT); // Pin 11 (PWM)
}
void go () // Forward
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, HIGH);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, HIGH);
}
void left () / / turn right
{
digitalWrite (MotorRight1, HIGH);
digitalWrite (MotorRight2, LOW);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, HIGH);
}
void right () / / turn left
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, HIGH);
digitalWrite (MotorLeft1, HIGH);
digitalWrite (MotorLeft2, LOW);
}
void stop () / / stop
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, LOW);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, LOW);
}
void back () / / Check out
{
digitalWrite (MotorRight1, HIGH);
digitalWrite (MotorRight2, LOW);
digitalWrite (MotorLeft1, HIGH);
digitalWrite (MotorLeft2, LOW) ;;
}
void loop ()
{
char val = Serial.read ();
Serial.write (val);
if (-1! = val) {
if ('W' == val)
go ();
else if ('A' == val)
left ();
else if ('D' == val)
right ();
else if ('S' == val)
back ();
else if ('Q' == val)
stop ();
delay (500);
}
else
{
/ / Stop ();
delay (500);
}
}

If you need to use all the functions, including recognition of the infrared signal, Bluetooth module commands and other features, you should use the following code:
/ / *********************** *******
# Include
# Include
/ / ************************ Definition of motor pin ********************** ****
int MotorRight1 = 5;
int MotorRight2 = 6;
int MotorLeft1 = 10;
int MotorLeft2 = 11;
int counter = 0;
const int irReceiverPin = 2; // OUTPUT signals IR receiver connected to pin 2
char val;
// ************************ Set to detect the IRcode ****************** ** *****
long IRfront = 0x00FFA25D; // forward code
long IRback = 0x00FF629D; //
check out long IRturnright = 0x00FFC23D; // Right
Long IRturnleft = 0x00FF02FD; // Left
Long IRstop = 0x00FFE21D; // Stop
long IRcny70 = 0x00FFA857; // CNY70 self-propelled mode
long IRAutorun = 0x00FF 906F; // Self-propelled mode ultrasound
long IRturnsmallleft = 0x00FF22DD;
// *************************** Defined CNY70 pin ******************* * ****************
const int SensorLeft = 7; // Left sensor input pin
const int SensorMiddle = 4; / / The sensor input pin
const int SensorRight = 3; // Right sensor input pin
int SL; // Left sensor status
int SM; / / The sensor status
int SR; // Right sensor status
IRrecv irrecv (irReceiverPin); // Define an object to receive infrared signals IRrecv
decode_results results; // Decoding results will result in structural variables in decode_results
// *************************** Defined ultrasound pin ****************** ** **********
int inputPin = 13; // define pin ultrasonic signal receiver rx
int outputPin = 12; // define ultrasonic signal transmitter pin 'tx
int Fspeedd = 0; / / in front of distance
int Rspeedd = 0; / / the right distance
int Lspeedd = 0; / / left distance
int directionn = 0; / / = 8 post = 2 front left and right = 6 = 4
Servo myservo; // set myservo
int delay_time = 250; // settling time after steering servo motors
int Fgo = 8; / / Forward
int Rgo = 6; / / turn right
int Lgo = 4; / / turn left
int Bgo = 2; // reverse
/// ************************************************** ********************* (SETUP)
void setup ()
{
Serial.begin (9600);
pinMode (MotorRight1, OUTPUT); // Pin 8 (PWM)
pinMode (MotorRight2, OUTPUT); // Pin 9 (PWM)
pinMode (MotorLeft1, OUTPUT); // Pin 10 (PWM)
pinMode (MotorLeft2, OUTPUT); // Pin 11 (PWM)
irrecv.enableIRIn (); // Start infrared decoding
pinMode (SensorLeft, INPUT); / / define left Sensors
pinMode (SensorMiddle, INPUT); / / definition sensors
pinMode (SensorRight, INPUT); // definition of the right sensor
digitalWrite (2, HIGH);
pinMode (inputPin, INPUT); // define ultrasound input pin
pinMode (outputPin, OUTPUT); // define ultrasonic output pin
myservo.attach (9); // define servo motor output section 5 pin (PWM)
}
// ************************************ ************* ******************* (Void)
void advance (int a) // Forward
{
digitalWrite (MotorRight1, LOW) ;
digitalWrite (MotorRight2, HIGH);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, HIGH);
delay (a * 100);
}
void right (int b) / / turn right (single wheel)
{
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, HIGH);
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, LOW);
delay (b * 100);
}
void left (int c) / / turn left (single wheel)
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, HIGH);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, LOW);
delay (c * 100);
}
void turnR (int d) / / turn right (wheel)
{
digitalWrite (MotorRight1, HIGH);
digitalWrite (MotorRight2, LOW);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, HIGH);
delay (d * 100);
}
void turnL (int e) / / turn left (wheel)
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, HIGH);
digitalWrite (MotorLeft1, HIGH);
digitalWrite (MotorLeft2, LOW);
delay (e * 100);
}
void stopp (int f) / / Stop
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, LOW);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, LOW);
delay (f * 100);
}
void back (int g) // Check out
{
digitalWrite (MotorRight1, HIGH);
digitalWrite (MotorRight2, LOW);
digitalWrite (MotorLeft1, HIGH);
digitalWrite (MotorLeft2, LOW) ;;
delay (g * 100);
}
void detection () / / measure three angles (front Left. Right)
{
int delay_time = 250; // settling time after steering servo motors
ask_pin_F (); / / read from front
if (Fspeedd <10) / / if the distance is less than 10 cm in front of
{
stopp (1); // clear the output data
back (2); // check out 0.2 seconds
}
if (Fspeedd <25) // if the distance is less than 25 cm in front of
{
stopp (1); // clear the output data
ask_pin_L (); // read from left
delay (delay_time); // wait for stable servo motor
ask_pin_R (); // read the right distance
delay (delay_time); / / wait for stable servo motor
if (Lspeedd> Rspeedd) / / If the distance is greater than the right from the left
{
directionn = Lgo; / / go left
}
if (Lspeedd <= Rspeedd) / / if the distance is less than or equal to the left to the right distance
{
directionn = Rgo; / / go right
}
if (Lspeedd <15 && Rspeedd <15) / / if the distance to the left and right are less than 10 cm distance
{
directionn = Bgo; / / to go after
}
}
else / / add as greater than 25 cm in front of
{
directionn = Fgo; / / to move forward
}
}
/ / ******************************************* ******* ***********************************
void ask_pin_F () / / Measure the distance from the front
{
myservo.write (90);
digitalWrite (outputPin, LOW); // make ultrasonic transmitter low voltage 2 μ s
delay Microseconds (2);
digitalWrite (outputPin, HIGH); // make ultrasonic transmitting high voltage 10 μ s, where at least 10 μ s
delayMicroseconds (10);
digitalWrite (outputPin, LOW); // maintain low voltage ultrasonic transmitter
float Fdistance = pulseIn (inputPin, HIGH); // read worse time difference
Fdistance = Fdistance / 5.8 / 10; / / will turn to time distance (unit: cm)
Serial.print ("F distance:"); // output distance (unit: cm)
Serial.println (Fdistance); / / display the distance
Fspeedd = Fdistance; / / will enter Fspeedd (former speed) from Reading
}
/// ************************************************** **********************************
void ask_pin_L () / / Measure the distance from the left
{
myservo.write (177 );
delay (delay_time);
digitalWrite (outputPin, LOW); // make ultrasonic transmitter low voltage 2 μ s
delay Microseconds (2);
digitalWrite (outputPin, HIGH); // make ultrasonic transmitting high voltage 10 μ s, where at least 10 μ s
delayMicroseconds (10);
digitalWrite (outputPin, LOW); // maintain low voltage ultrasonic transmitter
float Ldistance = pulseIn (inputPin, HIGH); // read worse time difference
Ldistance = Ldistance / 5.8 / 10; / / will turn to time distance (unit: cm)
Serial.print ("L distance:"); // output distance (unit: cm)
Serial.println (Ldistance); / / display the distance
Lspeedd = Ldistance; / / will be read into the distance Lspeedd (left-speed)
}
/ / ********************************* *************** ********************************
void ask_pin_R () / / Measure the distance from the right
{
myservo.write (5);
delay (delay_time);
digitalWrite (outputPin, LOW); // make ultrasonic transmitter low voltage 2 μ s
delay Microseconds (2);
digitalWrite (outputPin, HIGH); // make ultrasonic transmitting high voltage 10 μ s, where at least 10 μ s
delayMicroseconds (10);
digitalWrite (outputPin, LOW); // maintain low voltage ultrasonic transmitter
float Rdistance = pulseIn (inputPin, HIGH); // read worse time difference
Rdistance = Rdistance / 5.8 / 10; / / will turn to time distance (unit: cm)
Serial.print ("R distance:"); // output distance (unit: cm)
Serial.println (Rdistance); / / display the distance
Rspeedd = Rdistance; / / will be read into the distance Rspeedd (Right-speed)
}
/ / ********************************* *************** ******************************** (LOOP)
void loop ()
{
SL = digitalRead (SensorLeft);
SM = digitalRead (SensorMiddle);
SR = digitalRead (SensorRight);
performCommand ();
/// ************************************************** **************************** normal remote mode
if (irrecv.decode (& results))
{/ / Decoding is successful, you receive a set of infrared signals
/ ****************************************** ** **** *********************** /
if (results.value == IRfront) / / Forward
{
advance (10); / / forward
}
/ *************************************************** * ********************** /
if (results.value == IRback) / / Check out
{
back (10); / / after retirement
}
/ *** ************************************************* ****************** /
if (results.value == IRturnright) / / turn right
{
right (6); // turn right
}
/ ********************************************** ***** *********************** /
if (results.value == IRturnleft) / / turn left
{
left (6); / / turn left);
}
/ ************************************************** * *********************** /
if (results.value == IRstop) / / Stop
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, LOW);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, LOW);
}
// ************************************************** * *********************** cny70 model black self-propelled mode: LOW White:
if (results.value == IRcny70)
{
while (IRcny70)
{
SL = digitalRead (SensorLeft);
SM = digitalRead (SensorMiddle);
SR = digitalRead (SensorRight);
if (SM == HIGH) / / in sensors in black areas
{
if (SL == LOW & SR == HIGH) / / left and right black white, turn left
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, HIGH);
analogWrite (MotorLeft1, 0);
analogWrite (MotorLeft2, 80);
}
else if (SR == LOW & SL == HIGH) / / left and right black white, turn right
{
analogWrite (MotorRight1, 0); / / right turn
analogWrite (MotorRight2, 80);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, HIGH);
}
else / / Both sides white, straight
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, HIGH);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, HIGH);
analogWrite (MotorLeft1,200);
analogWrite (MotorLeft2,200);
analogWrite (MotorRight1, 200);
analogWrite (MotorRight2, 200);
}
}
else / / the sensors in the white area
{
if (SL == LOW & SR == HIGH) / / left and right black white, fast turn left
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, HIGH);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, LOW);
}
else if (SR == LOW & SL == HIGH) / / left and right black white, quick right turn
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, LOW);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, HIGH);
}
else / / are white, stop
{
digitalWrite (MotorRight1, HIGH);
digitalWrite (MotorRight2, LOW);
digitalWrite (MotorLeft1, HIGH);
digitalWrite (MotorLeft2, LOW) ;;
}
}
if (irrecv.decode (& results))
{
irrecv.resume ();
Serial.println (results.value, HEX);
if (results.value == IRstop)
{
digitalWrite (MotorRight1, HIGH);
digitalWrite (MotorRight2, HIGH);
digitalWrite (MotorLeft1, HIGH);
digitalWrite (MotorLeft2, HIGH);
break;
}
}
}
results.value = 0;
}
// ************************************************** * self-propelled mode ultrasound ************************
if (results.value == IRAutorun)
{
while (IRAutorun)
{
myservo.write (90) ; // return to the pre-prepared so that the servo motor position once the measure under preparation
detection (); / / measure the angle and direction of judgment to where to move
if (directionn == 8) / / If directionn (direction) = 8 (forward)
{
if (irrecv.decode (& results))
{
irrecv.resume ();
Serial.println (results.value, HEX);
if (results.value == IRstop)
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, LOW);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, LOW);
break;
}
}
results.value = 0;
advance (1); // normal forward
Serial.print ("Advance"); / / display direction (forward)
Serial.print ("");
}
if (directionn == 2) / / If directionn (direction) = 2 (reverse)
{
if (irrecv.decode (& results))
{
irrecv.resume ();
Serial.println (results.value, HEX);
if (results.value == IRstop)
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, LOW);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, LOW);
break;
}
}
results.value = 0;
back (8); // reverse (car)
turnL (3); / / move slightly to the left (to prevent stuck in dead alley)
Serial.print ("Reverse"); / / display direction (backwards)
}
if (directionn == 6) / / If directionn (direction) = 6 (right turn)
{
if (irrecv.decode (& results))
{
irrecv.resume ();
Serial.println (results.value, HEX);
if (results.value == IRstop)
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, LOW);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, LOW);
break;
}
}
results.value = 0;
back (1);
turnR (6); // turn right
Serial.print ("Right"); / / display direction (turn left)
}
if (directionn == 4) / / If directionn (direction) = 4 (turn left)
{
if (irrecv.decode (& results))
{
irrecv.resume ();
Serial.println (results.value, HEX);
if (results.value == IRstop)
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, LOW);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, LOW);
break;
}
}
results.value = 0;
back (1);
turnL (6); // turn left
Serial.print ("Left"); / / display direction (turn right)
}
if (irrecv.decode (& results))
{
irrecv.resume ();
Serial.println (results.value, HEX);
if (results.value == IRstop)
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, LOW);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, LOW);
break;
}
}
}
results.value = 0;
}
/ ************************************************** * *********************** /
else
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, LOW);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, LOW);
}
irrecv.resume (); // Continue to accept a set of infrared signals
}
}
void performCommand () {
if (Serial.available ()) {
val = Serial.read ();
}
if (val == 'f') {/ / Forward
advance (10);
} Else if (val == 'z') {/ / Stop Forward
stopp (10);
} Else if (val == 'b') {/ / Backward
back (10);
} Else if (val == 'y') {/ / Stop Backward
back (10);
} else if (val == 'l') {/ / Right
turnR (10);
} Else if (val == 'r') {/ / Left
turnL (10);
} Else if (val == 'v') {/ / Stop Turn
stop stopp (10);
} Else if (val == 's') {/ / Stop
stopp (10);
}
}
int MotorRight1 = 5;
int MotorRight2 = 6;
int MotorLeft1 = 10;
int MotorLeft2 = 11;
void setup ()
{
Serial.begin (9600);
pinMode (MotorRight1, OUTPUT); // Pin 8 (PWM)
pinMode (MotorRight2, OUTPUT); // Pin 9 (PWM)
pinMode (MotorLeft1, OUTPUT); // Pin 10 (PWM)
pinMode (MotorLeft2, OUTPUT); // Pin 11 (PWM)
}
void go () // Forward
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, HIGH);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, HIGH);
}
void left () / / turn right
{
digitalWrite (MotorRight1, HIGH);
digitalWrite (MotorRight2, LOW);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, HIGH);
}
void right () / / turn left
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, HIGH);
digitalWrite (MotorLeft1, HIGH);
digitalWrite (MotorLeft2, LOW);
}
void stop () / / stop
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, LOW);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, LOW);
}
void back () / / Check out
{
digitalWrite (MotorRight1, HIGH);
digitalWrite (MotorRight2, LOW);
digitalWrite (MotorLeft1, HIGH);
digitalWrite (MotorLeft2, LOW) ;;
}
void loop ()
{
char val = Serial.read ();
Serial.write (val);
if (-1! = val) {
if ('W' == val)
go ();
else if ('A' == val)
left ();
else if ('D' == val)
right ();
else if ('S' == val)
back ();
else if ('Q' == val)
stop ();
delay (500);
}
else
{
/ / Stop ();
delay (500);
}
}
If you need to use all the functions, including recognition of the infrared signal, Bluetooth module commands and other features, you should use the following code:
/ / *********************** *******
# Include
# Include
/ / ************************ Definition of motor pin ********************** ****
int MotorRight1 = 5;
int MotorRight2 = 6;
int MotorLeft1 = 10;
int MotorLeft2 = 11;
int counter = 0;
const int irReceiverPin = 2; // OUTPUT signals IR receiver connected to pin 2
char val;
// ************************ Set to detect the IRcode ****************** ** *****
long IRfront = 0x00FFA25D; // forward code
long IRback = 0x00FF629D; //
check out long IRturnright = 0x00FFC23D; // Right
Long IRturnleft = 0x00FF02FD; // Left
Long IRstop = 0x00FFE21D; // Stop
long IRcny70 = 0x00FFA857; // CNY70 self-propelled mode
long IRAutorun = 0x00FF 906F; // Self-propelled mode ultrasound
long IRturnsmallleft = 0x00FF22DD;
// *************************** Defined CNY70 pin ******************* * ****************
const int SensorLeft = 7; // Left sensor input pin
const int SensorMiddle = 4; / / The sensor input pin
const int SensorRight = 3; // Right sensor input pin
int SL; // Left sensor status
int SM; / / The sensor status
int SR; // Right sensor status
IRrecv irrecv (irReceiverPin); // Define an object to receive infrared signals IRrecv
decode_results results; // Decoding results will result in structural variables in decode_results
// *************************** Defined ultrasound pin ****************** ** **********
int inputPin = 13; // define pin ultrasonic signal receiver rx
int outputPin = 12; // define ultrasonic signal transmitter pin 'tx
int Fspeedd = 0; / / in front of distance
int Rspeedd = 0; / / the right distance
int Lspeedd = 0; / / left distance
int directionn = 0; / / = 8 post = 2 front left and right = 6 = 4
Servo myservo; // set myservo
int delay_time = 250; // settling time after steering servo motors
int Fgo = 8; / / Forward
int Rgo = 6; / / turn right
int Lgo = 4; / / turn left
int Bgo = 2; // reverse
/// ************************************************** ********************* (SETUP)
void setup ()
{
Serial.begin (9600);
pinMode (MotorRight1, OUTPUT); // Pin 8 (PWM)
pinMode (MotorRight2, OUTPUT); // Pin 9 (PWM)
pinMode (MotorLeft1, OUTPUT); // Pin 10 (PWM)
pinMode (MotorLeft2, OUTPUT); // Pin 11 (PWM)
irrecv.enableIRIn (); // Start infrared decoding
pinMode (SensorLeft, INPUT); / / define left Sensors
pinMode (SensorMiddle, INPUT); / / definition sensors
pinMode (SensorRight, INPUT); // definition of the right sensor
digitalWrite (2, HIGH);
pinMode (inputPin, INPUT); // define ultrasound input pin
pinMode (outputPin, OUTPUT); // define ultrasonic output pin
myservo.attach (9); // define servo motor output section 5 pin (PWM)
}
// ************************************ ************* ******************* (Void)
void advance (int a) // Forward
{
digitalWrite (MotorRight1, LOW) ;
digitalWrite (MotorRight2, HIGH);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, HIGH);
delay (a * 100);
}
void right (int b) / / turn right (single wheel)
{
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, HIGH);
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, LOW);
delay (b * 100);
}
void left (int c) / / turn left (single wheel)
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, HIGH);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, LOW);
delay (c * 100);
}
void turnR (int d) / / turn right (wheel)
{
digitalWrite (MotorRight1, HIGH);
digitalWrite (MotorRight2, LOW);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, HIGH);
delay (d * 100);
}
void turnL (int e) / / turn left (wheel)
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, HIGH);
digitalWrite (MotorLeft1, HIGH);
digitalWrite (MotorLeft2, LOW);
delay (e * 100);
}
void stopp (int f) / / Stop
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, LOW);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, LOW);
delay (f * 100);
}
void back (int g) // Check out
{
digitalWrite (MotorRight1, HIGH);
digitalWrite (MotorRight2, LOW);
digitalWrite (MotorLeft1, HIGH);
digitalWrite (MotorLeft2, LOW) ;;
delay (g * 100);
}
void detection () / / measure three angles (front Left. Right)
{
int delay_time = 250; // settling time after steering servo motors
ask_pin_F (); / / read from front
if (Fspeedd <10) / / if the distance is less than 10 cm in front of
{
stopp (1); // clear the output data
back (2); // check out 0.2 seconds
}
if (Fspeedd <25) // if the distance is less than 25 cm in front of
{
stopp (1); // clear the output data
ask_pin_L (); // read from left
delay (delay_time); // wait for stable servo motor
ask_pin_R (); // read the right distance
delay (delay_time); / / wait for stable servo motor
if (Lspeedd> Rspeedd) / / If the distance is greater than the right from the left
{
directionn = Lgo; / / go left
}
if (Lspeedd <= Rspeedd) / / if the distance is less than or equal to the left to the right distance
{
directionn = Rgo; / / go right
}
if (Lspeedd <15 && Rspeedd <15) / / if the distance to the left and right are less than 10 cm distance
{
directionn = Bgo; / / to go after
}
}
else / / add as greater than 25 cm in front of
{
directionn = Fgo; / / to move forward
}
}
/ / ******************************************* ******* ***********************************
void ask_pin_F () / / Measure the distance from the front
{
myservo.write (90);
digitalWrite (outputPin, LOW); // make ultrasonic transmitter low voltage 2 μ s
delay Microseconds (2);
digitalWrite (outputPin, HIGH); // make ultrasonic transmitting high voltage 10 μ s, where at least 10 μ s
delayMicroseconds (10);
digitalWrite (outputPin, LOW); // maintain low voltage ultrasonic transmitter
float Fdistance = pulseIn (inputPin, HIGH); // read worse time difference
Fdistance = Fdistance / 5.8 / 10; / / will turn to time distance (unit: cm)
Serial.print ("F distance:"); // output distance (unit: cm)
Serial.println (Fdistance); / / display the distance
Fspeedd = Fdistance; / / will enter Fspeedd (former speed) from Reading
}
/// ************************************************** **********************************
void ask_pin_L () / / Measure the distance from the left
{
myservo.write (177 );
delay (delay_time);
digitalWrite (outputPin, LOW); // make ultrasonic transmitter low voltage 2 μ s
delay Microseconds (2);
digitalWrite (outputPin, HIGH); // make ultrasonic transmitting high voltage 10 μ s, where at least 10 μ s
delayMicroseconds (10);
digitalWrite (outputPin, LOW); // maintain low voltage ultrasonic transmitter
float Ldistance = pulseIn (inputPin, HIGH); // read worse time difference
Ldistance = Ldistance / 5.8 / 10; / / will turn to time distance (unit: cm)
Serial.print ("L distance:"); // output distance (unit: cm)
Serial.println (Ldistance); / / display the distance
Lspeedd = Ldistance; / / will be read into the distance Lspeedd (left-speed)
}
/ / ********************************* *************** ********************************
void ask_pin_R () / / Measure the distance from the right
{
myservo.write (5);
delay (delay_time);
digitalWrite (outputPin, LOW); // make ultrasonic transmitter low voltage 2 μ s
delay Microseconds (2);
digitalWrite (outputPin, HIGH); // make ultrasonic transmitting high voltage 10 μ s, where at least 10 μ s
delayMicroseconds (10);
digitalWrite (outputPin, LOW); // maintain low voltage ultrasonic transmitter
float Rdistance = pulseIn (inputPin, HIGH); // read worse time difference
Rdistance = Rdistance / 5.8 / 10; / / will turn to time distance (unit: cm)
Serial.print ("R distance:"); // output distance (unit: cm)
Serial.println (Rdistance); / / display the distance
Rspeedd = Rdistance; / / will be read into the distance Rspeedd (Right-speed)
}
/ / ********************************* *************** ******************************** (LOOP)
void loop ()
{
SL = digitalRead (SensorLeft);
SM = digitalRead (SensorMiddle);
SR = digitalRead (SensorRight);
performCommand ();
/// ************************************************** **************************** normal remote mode
if (irrecv.decode (& results))
{/ / Decoding is successful, you receive a set of infrared signals
/ ****************************************** ** **** *********************** /
if (results.value == IRfront) / / Forward
{
advance (10); / / forward
}
/ *************************************************** * ********************** /
if (results.value == IRback) / / Check out
{
back (10); / / after retirement
}
/ *** ************************************************* ****************** /
if (results.value == IRturnright) / / turn right
{
right (6); // turn right
}
/ ********************************************** ***** *********************** /
if (results.value == IRturnleft) / / turn left
{
left (6); / / turn left);
}
/ ************************************************** * *********************** /
if (results.value == IRstop) / / Stop
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, LOW);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, LOW);
}
// ************************************************** * *********************** cny70 model black self-propelled mode: LOW White:
if (results.value == IRcny70)
{
while (IRcny70)
{
SL = digitalRead (SensorLeft);
SM = digitalRead (SensorMiddle);
SR = digitalRead (SensorRight);
if (SM == HIGH) / / in sensors in black areas
{
if (SL == LOW & SR == HIGH) / / left and right black white, turn left
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, HIGH);
analogWrite (MotorLeft1, 0);
analogWrite (MotorLeft2, 80);
}
else if (SR == LOW & SL == HIGH) / / left and right black white, turn right
{
analogWrite (MotorRight1, 0); / / right turn
analogWrite (MotorRight2, 80);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, HIGH);
}
else / / Both sides white, straight
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, HIGH);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, HIGH);
analogWrite (MotorLeft1,200);
analogWrite (MotorLeft2,200);
analogWrite (MotorRight1, 200);
analogWrite (MotorRight2, 200);
}
}
else / / the sensors in the white area
{
if (SL == LOW & SR == HIGH) / / left and right black white, fast turn left
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, HIGH);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, LOW);
}
else if (SR == LOW & SL == HIGH) / / left and right black white, quick right turn
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, LOW);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, HIGH);
}
else / / are white, stop
{
digitalWrite (MotorRight1, HIGH);
digitalWrite (MotorRight2, LOW);
digitalWrite (MotorLeft1, HIGH);
digitalWrite (MotorLeft2, LOW) ;;
}
}
if (irrecv.decode (& results))
{
irrecv.resume ();
Serial.println (results.value, HEX);
if (results.value == IRstop)
{
digitalWrite (MotorRight1, HIGH);
digitalWrite (MotorRight2, HIGH);
digitalWrite (MotorLeft1, HIGH);
digitalWrite (MotorLeft2, HIGH);
break;
}
}
}
results.value = 0;
}
// ************************************************** * self-propelled mode ultrasound ************************
if (results.value == IRAutorun)
{
while (IRAutorun)
{
myservo.write (90) ; // return to the pre-prepared so that the servo motor position once the measure under preparation
detection (); / / measure the angle and direction of judgment to where to move
if (directionn == 8) / / If directionn (direction) = 8 (forward)
{
if (irrecv.decode (& results))
{
irrecv.resume ();
Serial.println (results.value, HEX);
if (results.value == IRstop)
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, LOW);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, LOW);
break;
}
}
results.value = 0;
advance (1); // normal forward
Serial.print ("Advance"); / / display direction (forward)
Serial.print ("");
}
if (directionn == 2) / / If directionn (direction) = 2 (reverse)
{
if (irrecv.decode (& results))
{
irrecv.resume ();
Serial.println (results.value, HEX);
if (results.value == IRstop)
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, LOW);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, LOW);
break;
}
}
results.value = 0;
back (8); // reverse (car)
turnL (3); / / move slightly to the left (to prevent stuck in dead alley)
Serial.print ("Reverse"); / / display direction (backwards)
}
if (directionn == 6) / / If directionn (direction) = 6 (right turn)
{
if (irrecv.decode (& results))
{
irrecv.resume ();
Serial.println (results.value, HEX);
if (results.value == IRstop)
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, LOW);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, LOW);
break;
}
}
results.value = 0;
back (1);
turnR (6); // turn right
Serial.print ("Right"); / / display direction (turn left)
}
if (directionn == 4) / / If directionn (direction) = 4 (turn left)
{
if (irrecv.decode (& results))
{
irrecv.resume ();
Serial.println (results.value, HEX);
if (results.value == IRstop)
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, LOW);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, LOW);
break;
}
}
results.value = 0;
back (1);
turnL (6); // turn left
Serial.print ("Left"); / / display direction (turn right)
}
if (irrecv.decode (& results))
{
irrecv.resume ();
Serial.println (results.value, HEX);
if (results.value == IRstop)
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, LOW);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, LOW);
break;
}
}
}
results.value = 0;
}
/ ************************************************** * *********************** /
else
{
digitalWrite (MotorRight1, LOW);
digitalWrite (MotorRight2, LOW);
digitalWrite (MotorLeft1, LOW);
digitalWrite (MotorLeft2, LOW);
}
irrecv.resume (); // Continue to accept a set of infrared signals
}
}
void performCommand () {
if (Serial.available ()) {
val = Serial.read ();
}
if (val == 'f') {/ / Forward
advance (10);
} Else if (val == 'z') {/ / Stop Forward
stopp (10);
} Else if (val == 'b') {/ / Backward
back (10);
} Else if (val == 'y') {/ / Stop Backward
back (10);
} else if (val == 'l') {/ / Right
turnR (10);
} Else if (val == 'r') {/ / Left
turnL (10);
} Else if (val == 'v') {/ / Stop Turn
stop stopp (10);
} Else if (val == 's') {/ / Stop
stopp (10);
}
}
In fact, the machine is very flexible in setting, for it you can write new programs, seeking expansion of functions (especially if you connect other modules - you can connect not only what is included in the package, but also additional elements). What is shown above is just one example, and there are actually dozens of them.
Conclusion : The Robotale is designed to study the basics of electronics, in particular, to study the principle of operation of ARDUINO. The training is conducted in an interactive form, and the car owner is trained using the most effective way - an instant transition from theory to practice.
Only registered users can participate in the survey. Please come in.
Do you find Robotale a useful tool for learning electronics?
- 68.7% Yes, of course 240
- 8% Yes, but only if you add this and that (I will write in the comments) 28
- 17.1% No, this is a useless toy 60
- 6% What is Arduino? 21