Arduino at home, at work, in the car
Recently, more and more posts are devoted to crafts based on Arduino boards. I also want to talk about several projects created on the basis of these boards. I am not the author of these projects and have an indirect relation to them. But the real authors gave me the go-ahead to use their developments in this publication. The fact is that they have nothing to do with IT and, accordingly, do not have accounts on Habr and his offspring Geektimes.
I give a literal description of the projects from the authors.
The project is designed to begin to solve the problems of finding switches, forgetting trips and the need for closing. The first part implements the smooth inclusion of the illumination of the work surface in the kitchen and the illumination inside the cabinet, for example, you usually have to dive with a flashlight under the sink. Highlighting the working surface of the kitchen is realized by placing an LED strip on the bottom of the upper cabinets. Short presses of a button simply turn the light on and off. A long press turns on the mode of changing the level of light, gradual damping, upon reaching zero, turns on again brightly. When the button is released, the light level is remembered and further short presses of the button turn on the light to the stored level. Inside the cabinet, the light smoothly turns on and off by the operation of a reed switch built into the cabinet wall.
Программа тестировалась на Arduino UNO с контроллером AFMega8A-PU, а реализована на Arduino PRO Mini.
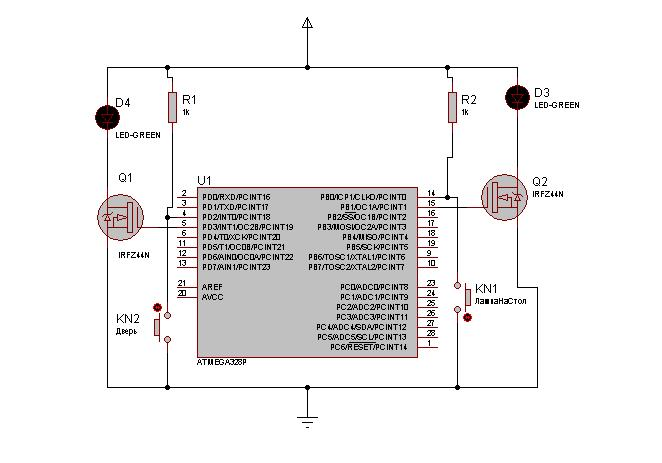
Принципиальная схема:
Файл проекта в программе FLProg.
Готовое устройство:
Видео в процессе сборки:
Видео законченного результата:
Написал программу сварочного контроллера для сварки арматуры. Запуск от ножной педали при наличии прутка арматуры.
Регулировка трех технологических параметров:
«Время ПРИЖИМА», «Время СВАРКИ»
«Время ПРОКОВКИ»
Дополнительно предусмотрен переключатель «АВТОМАТ- РУЧНОЙ»
Принципиальная схема:
Файл проекта в программе FLProg.
Light control unit on a car.
When the automatic mode is activated (dimensions, running lights, dipped beam), they turn on and off automatically. How did the signal from the tachometer turn on the auto mode and the dimensions and the diode light (automatic on). After the signal disappears (after 10 seconds), the automatic mode is off, and the dimensions go out after the ignition is off. When a signal from the speed sensor appears, the navigation lights or dipped headlights turn on (depending on the light). If they disappear (after 2 minutes) they turn off.
When the unit is turned on, the integrity of the low-beam lamps is monitored, the voltage on board (min, norm, max) is accompanied by a light and sound alarm (the sound signal can be turned off by pressing a button). If you connect the turn signals (to A7), then they will be accompanied by a sound signal. The project is assembled on Arduino Nano. It has been working like a clock for a month now.
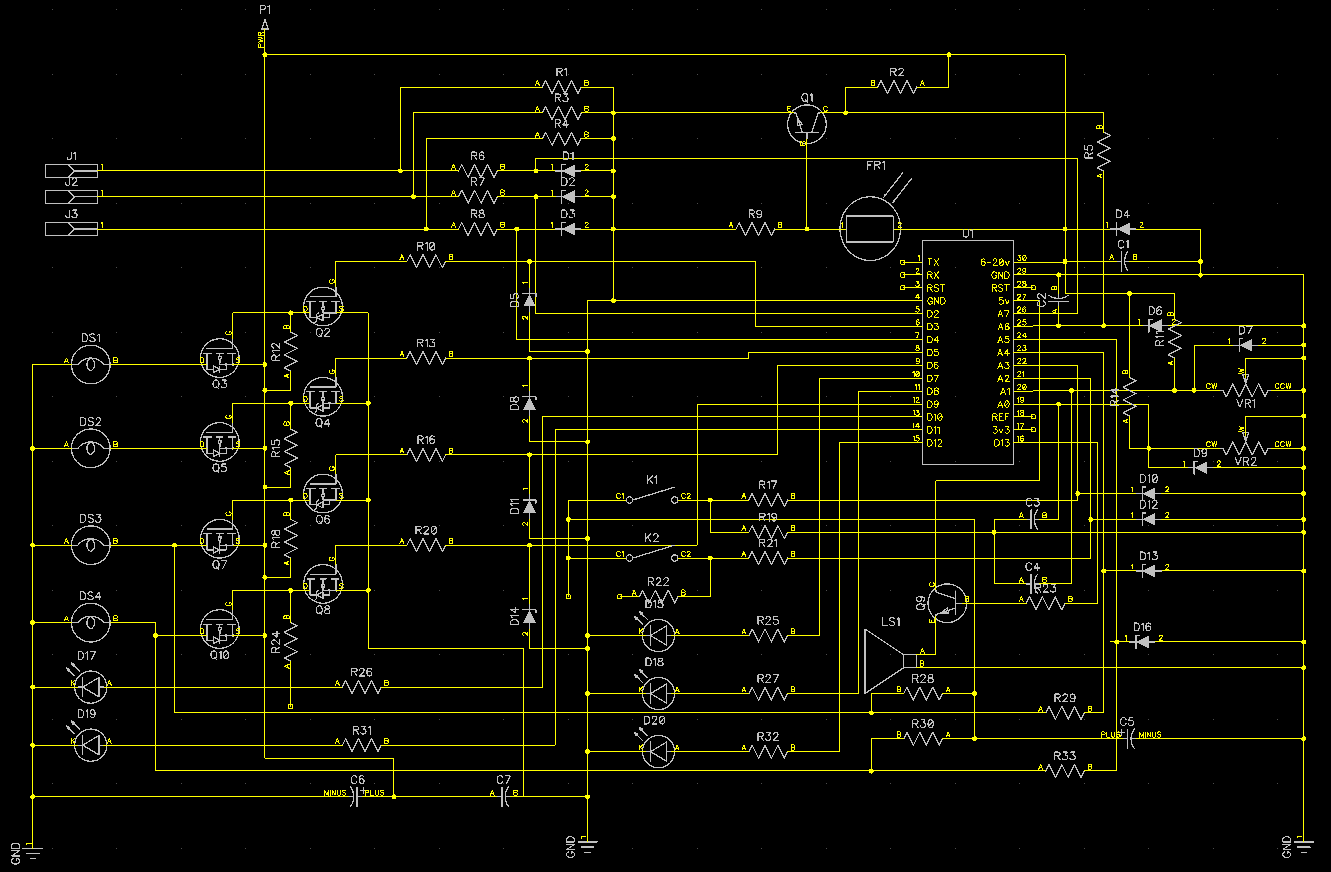
Schematic diagram:
Project file in the FLProg program.
Scheme in diptrace .
I will make a reservation right away. Surely many will have a question about the readability of sketches for the Arduino IDE. Sketches are automatically created by the program using a graphical programming environment. As I have already said, project authors have nothing to do with IT and programming. These are smart and economic people with straight arms and a clear understanding of what they need.
Now in development there are several more projects that I know of. These are greenhouse irrigation management, garage door management, combination lock and many other projects. If readers are interested, I will ask the authors to tell about their projects after their completion.
I give a literal description of the projects from the authors.
At home
Kitchen Lighting Control by Engineer200
The project is designed to begin to solve the problems of finding switches, forgetting trips and the need for closing. The first part implements the smooth inclusion of the illumination of the work surface in the kitchen and the illumination inside the cabinet, for example, you usually have to dive with a flashlight under the sink. Highlighting the working surface of the kitchen is realized by placing an LED strip on the bottom of the upper cabinets. Short presses of a button simply turn the light on and off. A long press turns on the mode of changing the level of light, gradual damping, upon reaching zero, turns on again brightly. When the button is released, the light level is remembered and further short presses of the button turn on the light to the stored level. Inside the cabinet, the light smoothly turns on and off by the operation of a reed switch built into the cabinet wall.
Программа тестировалась на Arduino UNO с контроллером AFMega8A-PU, а реализована на Arduino PRO Mini.
Принципиальная схема:
Файл проекта в программе FLProg.
Скетч для ArduinoIDE
bool _gtv1 = 0;
bool _gtv2 = 0;
int _gtv3 = 255;
int _gtv4 = 0;
bool _gtv9 = 0;
bool _gtv11 = 1;
int _gtv12 = 255;
bool _gtv13 = 0;
bool _gtv14 = 0;
bool _gtv15 = 0;
bool _gtv16 = 0;
bool _gtv17 = 0;
bool _gtv18 = 0;
int _gtv19 = 255;
int _gtv20 = 255;
int _gtv21 = 255;
int _gtv22 = 255;
int _gtv23 = 0;
int _gtv24 = 0;
bool _gtv5 = 0;
bool _gtv6 = 0;
int _gtv8 = 0;
int _gtv10 = 0;
int _gtv25 = 0;
bool _tim1I = 0;
bool _tim1O = 0;
unsigned long _tim1P = 0UL;
bool _tim3I = 0;
bool _tim3O = 0;
unsigned long _tim3P = 0UL;
bool _tim4I = 0;
bool _tim4O = 0;
unsigned long _tim4P = 0UL;
int _swi3;
bool _trgs1 = 0;
int _swi5;
bool _trgs2 = 0;
int _swi6;
bool _trgs3 = 0;
bool _gen1I = 0;
bool _gen1O = 0;
unsigned long _gen1P = 0UL;
int _swi4;
bool _count1I = 0;
int _count1P = 0;
bool _gen3I = 0;
bool _gen3O = 0;
unsigned long _gen3P = 0UL;
int _swi7;
bool _count3I = 0;
int _count3P = 0;
bool _gen4I = 0;
bool _gen4O = 0;
unsigned long _gen4P = 0UL;
int _swi8;
bool _count4I = 0;
int _count4P = 0;
bool _gen2I = 0;
bool _gen2O = 0;
unsigned long _gen2P = 0UL;
int _swi1;
int _swi2;
bool _count2I = 0;
int _count2P = 0;
bool _gen5I = 0;
bool _gen5O = 0;
unsigned long _gen5P = 0UL;
int _swi9;
int _swi10;
bool _count5I = 0;
int _count5P = 0;
bool _gen6I = 0;
bool _gen6O = 0;
unsigned long _gen6P = 0UL;
int _swi11;
int _swi12;
bool _count6I = 0;
int _count6P = 0;
bool _tim2I = 0;
bool _tim2O = 0;
unsigned long _tim2P = 0UL;
bool _tim5I = 0;
bool _tim5O = 0;
unsigned long _tim5P = 0UL;
bool _tim6I = 0;
bool _tim6O = 0;
unsigned long _tim6P = 0UL;
bool _gen7I = 0;
bool _gen7O = 0;
unsigned long _gen7P = 0UL;
int _swi13;
bool _count7I = 0;
int _count7P = 0;
bool _gen8I = 0;
bool _gen8O = 0;
unsigned long _gen8P = 0UL;
int _swi14;
bool _count8I = 0;
int _count8P = 0;
bool _gen9I = 0;
bool _gen9O = 0;
unsigned long _gen9P = 0UL;
int _swi15;
bool _count9I = 0;
int _count9P = 0;
bool _bounseInput2S = 0;
bool _bounseInput2O = 0;
unsigned long _bounseInput2P = 0UL;
bool _bounseInput4S = 0;
bool _bounseInput4O = 0;
unsigned long _bounseInput4P = 0UL;
bool _bounseInput7S = 0;
bool _bounseInput7O = 0;
unsigned long _bounseInput7P = 0UL;
bool _bounseInput13S = 0;
bool _bounseInput13O = 0;
unsigned long _bounseInput13P = 0UL;
bool _bounseInput8S = 0;
bool _bounseInput8O = 0;
unsigned long _bounseInput8P = 0UL;
bool _bounseInput12S = 0;
bool _bounseInput12O = 0;
unsigned long _bounseInput12P = 0UL;
void setup()
{
pinMode(8, INPUT);
digitalWrite(8, HIGH);
pinMode(12, INPUT);
digitalWrite(12, HIGH);
pinMode(13, INPUT);
pinMode(2, INPUT);
digitalWrite(2, HIGH);
pinMode(4, INPUT);
digitalWrite(4, HIGH);
pinMode(7, INPUT);
digitalWrite(7, HIGH);
_bounseInput12O = digitalRead(12);
_bounseInput8O = digitalRead(8);
_bounseInput2O = digitalRead(2);
_bounseInput4O = digitalRead(4);
_bounseInput7O = digitalRead(7);
_bounseInput13O = digitalRead(13);
}
void loop()
{
bool _bounceTmp2 = (digitalRead (2));
if (_bounseInput2S)
{
if (millis() >= (_bounseInput2P + 40))
{
_bounseInput2O = _bounceTmp2;
_bounseInput2S = 0;
}
}
else
{
if (_bounceTmp2 != _bounseInput2O )
{
_bounseInput2S = 1;
_bounseInput2P = millis();
}
}
bool _bounceTmp4 = (digitalRead (4));
if (_bounseInput4S)
{
if (millis() >= (_bounseInput4P + 40))
{
_bounseInput4O = _bounceTmp4;
_bounseInput4S = 0;
}
}
else
{
if (_bounceTmp4 != _bounseInput4O )
{
_bounseInput4S = 1;
_bounseInput4P = millis();
}
}
bool _bounceTmp7 = (digitalRead (7));
if (_bounseInput7S)
{
if (millis() >= (_bounseInput7P + 40))
{
_bounseInput7O = _bounceTmp7;
_bounseInput7S = 0;
}
}
else
{
if (_bounceTmp7 != _bounseInput7O )
{
_bounseInput7S = 1;
_bounseInput7P = millis();
}
}
bool _bounceTmp13 = (digitalRead (13));
if (_bounseInput13S)
{
if (millis() >= (_bounseInput13P + 40))
{
_bounseInput13O = _bounceTmp13;
_bounseInput13S = 0;
}
}
else
{
if (_bounceTmp13 != _bounseInput13O )
{
_bounseInput13S = 1;
_bounseInput13P = millis();
}
}
bool _bounceTmp8 = (digitalRead (8));
if (_bounseInput8S)
{
if (millis() >= (_bounseInput8P + 40))
{
_bounseInput8O = _bounceTmp8;
_bounseInput8S = 0;
}
}
else
{
if (_bounceTmp8 != _bounseInput8O )
{
_bounseInput8S = 1;
_bounseInput8P = millis();
}
}
bool _bounceTmp12 = (digitalRead (12));
if (_bounseInput12S)
{
if (millis() >= (_bounseInput12P + 40))
{
_bounseInput12O = _bounceTmp12;
_bounseInput12S = 0;
}
}
else
{
if (_bounceTmp12 != _bounseInput12O )
{
_bounseInput12S = 1;
_bounseInput12P = millis();
}
}
if (_bounseInput8O)
{
_tim1O = 1;
_tim1I = 1;
}
else
{
if (_tim1I)
{
_tim1I = 0;
_tim1P = millis();
}
else
{
if (_tim1O)
{ if ( _isTimer(_tim1P, 100)) _tim1O = 0;
}
}
}
if (_bounseInput12O)
{
_tim3O = 1;
_tim3I = 1;
}
else
{
if (_tim3I)
{
_tim3I = 0;
_tim3P = millis();
}
else
{
if (_tim3O)
{ if ( _isTimer(_tim3P, 100)) _tim3O = 0;
}
}
}
if (_bounseInput13O)
{
_tim4O = 1;
_tim4I = 1;
}
else
{
if (_tim4I)
{
_tim4I = 0;
_tim4P = millis();
}
else
{
if (_tim4O)
{ if ( _isTimer(_tim4P, 100)) _tim4O = 0;
}
}
}
_gtv11 = _tim1O;
_gtv15 = _tim3O;
_gtv16 = _tim4O;
if ( (_gtv9) || ( ( (!(_gtv9)) && (_gtv11) && (!(_gtv1)) ) && ((_gtv3) == (0)) ) ) _trgs1 = 1;
if ( ( (!(_gtv9)) && (_gtv11) && (!(_gtv1)) ) && ((_gtv3) > (0)) ) _trgs1 = 0;
if (_trgs1)
{
_swi3 = _gtv12;
}
else
{
_swi3 = 0;
}
_gtv3 = _swi3;
if ( (_gtv17) || ( ( (!(_gtv17)) && (_gtv15) && (!(_gtv13)) ) && ((_gtv21) == (0)) ) ) _trgs2 = 1;
if ( ( (!(_gtv17)) && (_gtv15) && (!(_gtv13)) ) && ((_gtv21) > (0)) ) _trgs2 = 0;
if (_trgs2)
{
_swi5 = _gtv19;
}
else
{
_swi5 = 0;
}
_gtv21 = _swi5;
if ( (_gtv18) || ( ( (!(_gtv18)) && (_gtv16) && (!(_gtv14)) ) && ((_gtv22) == (0)) ) ) _trgs3 = 1;
if ( ( (!(_gtv18)) && (_gtv16) && (!(_gtv14)) ) && ((_gtv22) > (0)) ) _trgs3 = 0;
if (_trgs3)
{
_swi6 = _gtv20;
}
else
{
_swi6 = 0;
}
_gtv22 = _swi6;
if (_gtv9)
{
_swi4 = 0;
}
else
{
_swi4 = 2;
}
if ( ((_gtv4) < (_gtv3)) || ((_gtv4) > (_gtv3)) )
{
if (! _gen1I)
{
_gen1I = 1;
_gen1O = 1;
_gen1P = millis();
}
}
else
{
_gen1I = 0 ;
_gen1O = 0;
}
if (_gen1I )
{
if ( _isTimer ( _gen1P , _swi4 ))
{
_gen1P = millis();
_gen1O = ! _gen1O;
}
}
if (_gen1O)
{
if (! _count1I)
{
if ( ((_gtv4) < (_gtv3)) && (!((_gtv4) > (_gtv3))) ) {
_count1P = _count1P + 1;
} else {
_count1P = _count1P - 1;
};
_count1I = 1;
}
}
else
{
_count1I = 0;
}
if (_count1P < 0 ) _count1P = 0;
if (0) _count1P = 0;
analogWrite(9, _count1P);
_gtv4 = _count1P;
if (_gtv17)
{
_swi7 = 0;
}
else
{
_swi7 = 2;
}
if ( ((_gtv23) < (_gtv21)) || ((_gtv23) > (_gtv21)) )
{
if (! _gen3I)
{
_gen3I = 1;
_gen3O = 1;
_gen3P = millis();
}
}
else
{
_gen3I = 0 ;
_gen3O = 0;
}
if (_gen3I )
{
if ( _isTimer ( _gen3P , _swi7 ))
{
_gen3P = millis();
_gen3O = ! _gen3O;
}
}
if (_gen3O)
{
if (! _count3I)
{
if ( ((_gtv23) < (_gtv21)) && (!((_gtv23) > (_gtv21))) ) {
_count3P = _count3P + 1;
} else {
_count3P = _count3P - 1;
};
_count3I = 1;
}
}
else
{
_count3I = 0;
}
if (_count3P < 0 ) _count3P = 0;
if (0) _count3P = 0;
analogWrite(10, _count3P);
_gtv23 = _count3P;
if (_gtv18)
{
_swi8 = 0;
}
else
{
_swi8 = 2;
}
if ( ((_gtv24) < (_gtv22)) || ((_gtv24) > (_gtv22)) )
{
if (! _gen4I)
{
_gen4I = 1;
_gen4O = 1;
_gen4P = millis();
}
}
else
{
_gen4I = 0 ;
_gen4O = 0;
}
if (_gen4I )
{
if ( _isTimer ( _gen4P , _swi8 ))
{
_gen4P = millis();
_gen4O = ! _gen4O;
}
}
if (_gen4O)
{
if (! _count4I)
{
if ( ((_gtv24) < (_gtv22)) && (!((_gtv24) > (_gtv22))) ) {
_count4P = _count4P + 1;
} else {
_count4P = _count4P - 1;
};
_count4I = 1;
}
}
else
{
_count4I = 0;
}
if (_count4P < 0 ) _count4P = 0;
if (0) _count4P = 0;
_gtv24 = _count4P;
analogWrite(11, _count4P);
if (_gtv9)
{
if (! _gen2I)
{
_gen2I = 1;
_gen2O = 1;
_gen2P = millis();
}
}
else
{
_gen2I = 0 ;
_gen2O = 0;
}
if (_gen2I )
{
if ( _isTimer ( _gen2P , 7 ))
{
_gen2P = millis();
_gen2O = ! _gen2O;
}
}
if (_gen2O)
{
if (! _count2I)
{
_count2P = _count2P + 1;
_count2I = 1;
}
}
else
{
_count2I = 0;
}
if (_count2P < 0 ) _count2P = 0;
if (_gtv2) _count2P = 0;
if (((300) - (_count2P)) > (255))
{
_swi1 = 255;
}
else
{
_swi1 = (300) - (_count2P);
}
if (_gtv9)
{
_swi2 = _swi1;
}
else
{
_swi2 = _gtv12;
}
_gtv2 = (_count2P) >= (300);
_gtv12 = _swi2;
if (_gtv17)
{
if (! _gen5I)
{
_gen5I = 1;
_gen5O = 1;
_gen5P = millis();
}
}
else
{
_gen5I = 0 ;
_gen5O = 0;
}
if (_gen5I )
{
if ( _isTimer ( _gen5P , 7 ))
{
_gen5P = millis();
_gen5O = ! _gen5O;
}
}
if (_gen5O)
{
if (! _count5I)
{
_count5P = _count5P + 1;
_count5I = 1;
}
}
else
{
_count5I = 0;
}
if (_count5P < 0 ) _count5P = 0;
if (_gtv5) _count5P = 0;
if (((300) - (_count5P)) > (255))
{
_swi9 = 255;
}
else
{
_swi9 = (300) - (_count5P);
}
if (_gtv17)
{
_swi10 = _swi9;
}
else
{
_swi10 = _gtv19;
}
_gtv5 = (_count5P) >= (300);
_gtv19 = _swi10;
if (_gtv18)
{
if (! _gen6I)
{
_gen6I = 1;
_gen6O = 1;
_gen6P = millis();
}
}
else
{
_gen6I = 0 ;
_gen6O = 0;
}
if (_gen6I )
{
if ( _isTimer ( _gen6P , 7 ))
{
_gen6P = millis();
_gen6O = ! _gen6O;
}
}
if (_gen6O)
{
if (! _count6I)
{
_count6P = _count6P + 1;
_count6I = 1;
}
}
else
{
_count6I = 0;
}
if (_count6P < 0 ) _count6P = 0;
if (_gtv6) _count6P = 0;
if (((300) - (_count6P)) > (255))
{
_swi11 = 255;
}
else
{
_swi11 = (300) - (_count6P);
}
if (_gtv18)
{
_swi12 = _swi11;
}
else
{
_swi12 = _gtv20;
}
_gtv6 = (_count6P) >= (300);
_gtv20 = _swi12;
_gtv1 = _gtv11;
_gtv13 = _gtv15;
_gtv14 = _gtv16;
if (_gtv11)
{
_tim2O = 1;
_tim2I = 1;
}
else
{
if (_tim2I)
{
_tim2I = 0;
_tim2P = millis();
}
else
{
if (_tim2O)
{ if ( _isTimer(_tim2P, 1000)) _tim2O = 0;
}
}
}
if (_gtv15)
{
_tim5O = 1;
_tim5I = 1;
}
else
{
if (_tim5I)
{
_tim5I = 0;
_tim5P = millis();
}
else
{
if (_tim5O)
{ if ( _isTimer(_tim5P, 1000)) _tim5O = 0;
}
}
}
if (_gtv16)
{
_tim6O = 1;
_tim6I = 1;
}
else
{
if (_tim6I)
{
_tim6I = 0;
_tim6P = millis();
}
else
{
if (_tim6O)
{ if ( _isTimer(_tim6P, 1000)) _tim6O = 0;
}
}
}
_gtv9 = (!(_tim2O)) && (!(_gtv11)) ;
_gtv17 = (!(_tim5O)) && (!(_gtv15)) ;
_gtv18 = (!(_tim6O)) && (!(_gtv16)) ;
if (_bounseInput2O)
{
_swi13 = 255;
}
else
{
_swi13 = 0;
}
if ( ((_gtv8) < (_swi13)) || ((_gtv8) > (_swi13)) )
{
if (! _gen7I)
{
_gen7I = 1;
_gen7O = 1;
_gen7P = millis();
}
}
else
{
_gen7I = 0 ;
_gen7O = 0;
}
if (_gen7I )
{
if ( _isTimer ( _gen7P , 3 ))
{
_gen7P = millis();
_gen7O = ! _gen7O;
}
}
if (_gen7O)
{
if (! _count7I)
{
if ( ((_gtv8) < (_swi13)) && (!((_gtv8) > (_swi13))) ) {
_count7P = _count7P + 1;
} else {
_count7P = _count7P - 1;
};
_count7I = 1;
}
}
else
{
_count7I = 0;
}
if (_count7P < 0 ) _count7P = 0;
if (0) _count7P = 0;
analogWrite(3, _count7P);
_gtv8 = _count7P;
if (_bounseInput4O)
{
_swi14 = 255;
}
else
{
_swi14 = 0;
}
if ( ((_gtv10) < (_swi14)) || ((_gtv10) > (_swi14)) )
{
if (! _gen8I)
{
_gen8I = 1;
_gen8O = 1;
_gen8P = millis();
}
}
else
{
_gen8I = 0 ;
_gen8O = 0;
}
if (_gen8I )
{
if ( _isTimer ( _gen8P , 3 ))
{
_gen8P = millis();
_gen8O = ! _gen8O;
}
}
if (_gen8O)
{
if (! _count8I)
{
if ( ((_gtv10) < (_swi14)) && (!((_gtv10) > (_swi14))) ) {
_count8P = _count8P + 1;
} else {
_count8P = _count8P - 1;
};
_count8I = 1;
}
}
else
{
_count8I = 0;
}
if (_count8P < 0 ) _count8P = 0;
if (0) _count8P = 0;
analogWrite(5, _count8P);
_gtv10 = _count8P;
if (_bounseInput7O)
{
_swi15 = 255;
}
else
{
_swi15 = 0;
}
if ( ((_gtv25) < (_swi15)) || ((_gtv25) > (_swi15)) )
{
if (! _gen9I)
{
_gen9I = 1;
_gen9O = 1;
_gen9P = millis();
}
}
else
{
_gen9I = 0 ;
_gen9O = 0;
}
if (_gen9I )
{
if ( _isTimer ( _gen9P , 3 ))
{
_gen9P = millis();
_gen9O = ! _gen9O;
}
}
if (_gen9O)
{
if (! _count9I)
{
if ( ((_gtv25) < (_swi15)) && (!((_gtv25) > (_swi15))) ) {
_count9P = _count9P + 1;
} else {
_count9P = _count9P - 1;
};
_count9I = 1;
}
}
else
{
_count9I = 0;
}
if (_count9P < 0 ) _count9P = 0;
if (0) _count9P = 0;
analogWrite(6, _count9P);
_gtv25 = _count9P;
}
bool _isTimer(unsigned long startTime, unsigned long period )
{
unsigned long endTime;
endTime = startTime + period;
return (millis() >= endTime);
}
Готовое устройство:
Видео в процессе сборки:
Видео законченного результата:
На работе
Cварочный контроллер для сварки арматуры от ALEX
Написал программу сварочного контроллера для сварки арматуры. Запуск от ножной педали при наличии прутка арматуры.
Регулировка трех технологических параметров:
«Время ПРИЖИМА», «Время СВАРКИ»
«Время ПРОКОВКИ»
Дополнительно предусмотрен переключатель «АВТОМАТ- РУЧНОЙ»
Принципиальная схема:
Файл проекта в программе FLProg.
Скетч для ArduinoIDE
bool _gtv1 = 0;
bool _tim1I = 0;
bool _tim1O = 0;
unsigned long _tim1P = 0UL;
bool _gen1I = 0;
bool _gen1O = 0;
unsigned long _gen1P = 0UL;
bool _trgr1 = 0;
bool _gen2I = 0;
bool _gen2O = 0;
unsigned long _gen2P = 0UL;
bool _tim2I = 0;
bool _tim2O = 0;
unsigned long _tim2P = 0UL;
bool _tim3I = 0;
bool _tim3O = 0;
unsigned long _tim3P = 0UL;
bool _gen4I = 0;
bool _gen4O = 0;
unsigned long _gen4P = 0UL;
void setup()
{
pinMode(2, INPUT);
pinMode(3, INPUT);
pinMode(4, INPUT);
pinMode(5, OUTPUT);
pinMode(6, OUTPUT);
}
void loop()
{
if ( ( (digitalRead (2))) && ( (digitalRead (3))) )
{
if (_tim1I)
{
if ( _isTimer(_tim1P, nil)) _tim1O = 1;
}
else
{
_tim1I = 1;
_tim1P = millis();
}
}
else
{
_tim1O = 0;
_tim1I = 0;
}
if (_tim1O)
{
if (! _gen1I)
{
_gen1I = 1;
_gen1O = 1;
_gen1P = millis();
}
}
else
{
_gen1I = 0 ;
_gen1O = 0;
}
if (_gen1I && _gen1O) _gen1O = !( _isTimer ( _gen1P , 10 ));
if ( ( ( (digitalRead (2))) && (!( (digitalRead (4)))) ) || ( ( (digitalRead (4))) && (_gtv1) ) )
{
if (! _gen2I)
{
_gen2I = 1;
_gen2O = 1;
_gen2P = millis();
}
}
else
{
_gen2I = 0 ;
_gen2O = 0;
}
if (_gen2I && _gen2O) _gen2O = !( _isTimer ( _gen2P , 10 ));
if (_gen2O) _trgr1 = 0;
if (_gen1O) _trgr1 = 1;
if (_trgr1)
{
if (_tim2I)
{
if ( _isTimer(_tim2P, (( (analogRead (1))) / (8)) + (100))) _tim2O = 1;
}
else
{
_tim2I = 1;
_tim2P = millis();
}
}
else
{
_tim2O = 0;
_tim2I = 0;
}
if (_tim2O)
{
if (! _gen4I)
{
_gen4I = 1;
_gen4O = 1;
_gen4P = millis();
}
}
else
{
_gen4I = 0 ;
_gen4O = 0;
}
if (_gen4I && _gen4O) _gen4O = !( _isTimer ( _gen4P , (( (analogRead (0))) / (8)) + (100) ));
if (_gen4O)
{
_tim3O = 1;
_tim3I = 1;
}
else
{
if (_tim3I)
{
_tim3I = 0;
_tim3P = millis();
}
else
{
if (_tim3O)
{ if ( _isTimer(_tim3P, (( (analogRead (2))) / (8)) + (100))) _tim3O = 0;
}
}
}
digitalWrite(5, _trgr1);
digitalWrite(6, _gen4O);
_gtv1 = (!(_tim3O));
}
bool _isTimer(unsigned long startTime, unsigned long period )
{
unsigned long endTime;
endTime = startTime + period;
return (millis() >= endTime);
}
В машине
Управление осветительными приборами автомобиля от karam.d
Light control unit on a car.
When the automatic mode is activated (dimensions, running lights, dipped beam), they turn on and off automatically. How did the signal from the tachometer turn on the auto mode and the dimensions and the diode light (automatic on). After the signal disappears (after 10 seconds), the automatic mode is off, and the dimensions go out after the ignition is off. When a signal from the speed sensor appears, the navigation lights or dipped headlights turn on (depending on the light). If they disappear (after 2 minutes) they turn off.
When the unit is turned on, the integrity of the low-beam lamps is monitored, the voltage on board (min, norm, max) is accompanied by a light and sound alarm (the sound signal can be turned off by pressing a button). If you connect the turn signals (to A7), then they will be accompanied by a sound signal. The project is assembled on Arduino Nano. It has been working like a clock for a month now.
Schematic diagram:
Project file in the FLProg program.
Scheme in diptrace .
Sketch for ArduinoIDE
bool _gtv1 = 0;
bool _gtv5 = 0;
bool _gtv6 = 0;
bool _gtv7 = 0;
bool _gtv8 = 0;
bool _gtv9 = 0;
bool _gtv10 = 0;
bool _gtv11 = 0;
bool _gtv2 = 0;
bool _gtv3 = 0;
bool _gtv4 = 0;
bool _gtv12 = 0;
bool _gtv13 = 0;
bool _gtv14 = 0;
bool _bounse1S = 0;
bool _bounse1O = 0;
unsigned long _bounse1P = 0UL;
bool _tim1I = 0;
bool _tim1O = 0;
unsigned long _tim1P = 0UL;
bool _tim6I = 0;
bool _tim6O = 0;
unsigned long _tim6P = 0UL;
bool _trgrt2 = 0;
bool _trgrt2I = 0;
bool _gen4I = 0;
bool _gen4O = 0;
unsigned long _gen4P = 0UL;
bool _count3I = 0;
int _count3P = 0;
bool _tim10I = 0;
bool _tim10O = 0;
unsigned long _tim10P = 0UL;
bool _tim9I = 0;
bool _tim9O = 0;
unsigned long _tim9P = 0UL;
bool _tim2I = 0;
bool _tim2O = 0;
unsigned long _tim2P = 0UL;
bool _trgrt1 = 0;
bool _trgrt1I = 0;
bool _tim8I = 0;
bool _tim8O = 0;
unsigned long _tim8P = 0UL;
bool _gen2I = 0;
bool _gen2O = 0;
unsigned long _gen2P = 0UL;
bool _count1I = 0;
int _count1P = 0;
bool _tim3I = 0;
bool _tim3O = 0;
unsigned long _tim3P = 0UL;
bool _gen3I = 0;
bool _gen3O = 0;
unsigned long _gen3P = 0UL;
bool _count2I = 0;
int _count2P = 0;
bool _tim4I = 0;
bool _tim4O = 0;
unsigned long _tim4P = 0UL;
bool _tim5I = 0;
bool _tim5O = 0;
unsigned long _tim5P = 0UL;
bool _tim7I = 0;
bool _tim7O = 0;
unsigned long _tim7P = 0UL;
bool _gen1I = 0;
bool _gen1O = 0;
unsigned long _gen1P = 0UL;
bool _bounse3S = 0;
bool _bounse3O = 0;
unsigned long _bounse3P = 0UL;
bool _bounse2S = 0;
bool _bounse2O = 0;
unsigned long _bounse2P = 0UL;
bool _trgt1 = 0;
bool _trgt1I = 0;
void setup()
{
pinMode(2, INPUT);
pinMode(4, INPUT);
pinMode(7, OUTPUT);
pinMode(12, OUTPUT);
pinMode(8, OUTPUT);
pinMode(13, OUTPUT);
pinMode(10, OUTPUT);
pinMode(11, OUTPUT);
}
void loop()
{
bool _bounceTmp1 = ( (analogRead (2))) > (500);
if (_bounse1S)
{
if (millis() >= (_bounse1P + 40))
{
_bounse1O = _bounceTmp1;
_bounse1S = 0;
}
}
else
{
if (_bounceTmp1 != _bounse1O )
{
_bounse1S = 1;
_bounse1P = millis();
}
}
_gtv1 = _bounse1O;
if ( (digitalRead (2))) {
if (_trgrt2I) {
_trgrt2 = 0;
} else {
_trgrt2 = 1;
_trgrt2I = 1;
}
} else {
_trgrt2 = 0;
_trgrt2I = 0;
};
if (_trgrt2)
{
_tim1O = 1;
_tim1I = 1;
}
else
{
if (_tim1I)
{
_tim1I = 0;
_tim1P = millis();
}
else
{
if (_tim1O)
{ if ( _isTimer(_tim1P, 10000)) _tim1O = 0;
}
}
}
if ( (!(_gtv1)) && (_tim1O) )
{
if (_tim6I)
{
if ( _isTimer(_tim6P, 3000)) _tim6O = 1;
}
else
{
_tim6I = 1;
_tim6P = millis();
}
}
else
{
_tim6O = 0;
_tim6I = 0;
}
if ( (_tim6O) ^ (_gtv14) )
{
if (! _gen4I)
{
_gen4I = 1;
_gen4O = 1;
_gen4P = millis();
}
}
else
{
_gen4I = 0 ;
_gen4O = 0;
}
if (_gen4I )
{
if ( _isTimer ( _gen4P , 1 ))
{
_gen4P = millis();
_gen4O = ! _gen4O;
}
}
if (_gen4O)
{
if (! _count3I)
{
_count3P = _count3P + 1;
_count3I = 1;
}
}
else
{
_count3I = 0;
}
if (_count3P < 0 ) _count3P = 0;
_gtv5 = _tim6O;
digitalWrite(7, _tim6O);
_gtv14 = _count3P >= 920;
if (_tim6O) {
analogWrite(3, (map((_count3P), (0), (1023), (0), (254))));
}
if ( (_gtv5) && (( (analogRead (5))) > (500)) )
{
if (_tim10I)
{
if ( _isTimer(_tim10P, 2005)) _tim10O = 1;
}
else
{
_tim10I = 1;
_tim10P = millis();
}
}
else
{
_tim10O = 0;
_tim10I = 0;
}
digitalWrite(8, _tim10O);
_gtv11 = _tim10O;
if ( (_gtv5) && (( (analogRead (4))) > (500)) )
{
if (_tim9I)
{
if ( _isTimer(_tim9P, 2005)) _tim9O = 1;
}
else
{
_tim9I = 1;
_tim9P = millis();
}
}
else
{
_tim9O = 0;
_tim9I = 0;
}
_gtv10 = _tim9O;
digitalWrite(12, _tim9O);
if ( (digitalRead (4))) {
if (_trgrt1I) {
_trgrt1 = 0;
} else {
_trgrt1 = 1;
_trgrt1I = 1;
}
} else {
_trgrt1 = 0;
_trgrt1I = 0;
};
if (_trgrt1)
{
_tim2O = 1;
_tim2I = 1;
}
else
{
if (_tim2I)
{
_tim2I = 0;
_tim2P = millis();
}
else
{
if (_tim2O)
{ if ( _isTimer(_tim2P, 120000)) _tim2O = 0;
}
}
}
if ( (_gtv5) && (_tim2O) )
{
if (_tim8I)
{
if ( _isTimer(_tim8P, 2000)) _tim8O = 1;
}
else
{
_tim8I = 1;
_tim8P = millis();
}
}
else
{
_tim8O = 0;
_tim8I = 0;
}
if ( (_tim8O) && (!(_gtv3)) && (!(_gtv4)) )
{
if (! _gen2I)
{
_gen2I = 1;
_gen2O = 1;
_gen2P = millis();
}
}
else
{
_gen2I = 0 ;
_gen2O = 0;
}
if (_gen2I )
{
if ( _isTimer ( _gen2P , 1 ))
{
_gen2P = millis();
_gen2O = ! _gen2O;
}
}
if (_gen2O)
{
if (! _count1I)
{
_count1P = _count1P + 1;
_count1I = 1;
}
}
else
{
_count1I = 0;
}
if (_count1P < 0 ) _count1P = 0;
if (_gtv3) _count1P = 0;
_gtv6 = _tim8O;
_gtv4 = _count1P >= 920;
analogWrite(5, (map((_count1P), (0), (1023), (0), (254))));
if (( (analogRead (6))) > (700))
{
_tim3O = 1;
_tim3I = 1;
}
else
{
if (_tim3I)
{
_tim3I = 0;
_tim3P = millis();
}
else
{
if (_tim3O)
{ if ( _isTimer(_tim3P, 120000)) _tim3O = 0;
}
}
}
if ( ( (_tim3O) && (_gtv5) && (_gtv6) ) ^ (_gtv12) )
{
if (! _gen3I)
{
_gen3I = 1;
_gen3O = 1;
_gen3P = millis();
}
}
else
{
_gen3I = 0 ;
_gen3O = 0;
}
if (_gen3I )
{
if ( _isTimer ( _gen3P , 1 ))
{
_gen3P = millis();
_gen3O = ! _gen3O;
}
}
if (_gen3O)
{
if (! _count2I)
{
_count2P = _count2P + 1;
_count2I = 1;
}
}
else
{
_count2I = 0;
}
if (_count2P < 0 ) _count2P = 0;
if (!(_gtv13)) _count2P = 0;
_gtv13 = _tim3O;
_gtv3 = (_tim3O) && (_gtv5) && (_gtv6) ;
_gtv12 = _count2P >= 920;
analogWrite(9, (map((_count2P), (0), (1023), (0), (254))));
analogWrite(6, (map((_count2P), (0), (1023), (0), (254))));
if (( (analogRead (0))) > (600.00))
{
if (_tim4I)
{
if ( _isTimer(_tim4P, 4000)) _tim4O = 1;
}
else
{
_tim4I = 1;
_tim4P = millis();
}
}
else
{
_tim4O = 0;
_tim4I = 0;
}
if (( (analogRead (1))) < (500.00))
{
if (_tim5I)
{
if ( _isTimer(_tim5P, 4000)) _tim5O = 1;
}
else
{
_tim5I = 1;
_tim5P = millis();
}
}
else
{
_tim5O = 0;
_tim5I = 0;
}
_gtv8 = _tim4O;
_gtv7 = _tim5O;
digitalWrite(10, (_gtv8) || (_gtv7) );
_gtv9 = (! (_gtv8) || (0) );
digitalWrite(11, (_gtv7) || (_gtv9) );
if ( ( (_gtv8) || (_gtv7) || (_gtv10) || (_gtv11) ) ^ ( ( (_gtv8) || (_gtv7) || (_gtv10) || (_gtv11) ) && (_gtv2) ) )
{
if (_tim7I)
{
if ( _isTimer(_tim7P, 2000)) _tim7O = 1;
}
else
{
_tim7I = 1;
_tim7P = millis();
}
}
else
{
_tim7O = 0;
_tim7I = 0;
}
if (_tim7O)
{
if (! _gen1I)
{
_gen1I = 1;
_gen1O = 1;
_gen1P = millis();
}
}
else
{
_gen1I = 0 ;
_gen1O = 0;
}
if (_gen1I )
{
if ( _isTimer ( _gen1P , 1000 ))
{
_gen1P = millis();
_gen1O = ! _gen1O;
}
}
bool _bounceTmp3 = ( (analogRead (7))) > (500);
if (_bounse3S)
{
if (millis() >= (_bounse3P + 40))
{
_bounse3O = _bounceTmp3;
_bounse3S = 0;
}
}
else
{
if (_bounceTmp3 != _bounse3O )
{
_bounse3S = 1;
_bounse3P = millis();
}
}
digitalWrite(13, (_gen1O) || (_bounse3O) );
bool _bounceTmp2 = ( (analogRead (3))) > (500);
if (_bounse2S)
{
if (millis() >= (_bounse2P + 40))
{
_bounse2O = _bounceTmp2;
_bounse2S = 0;
}
}
else
{
if (_bounceTmp2 != _bounse2O )
{
_bounse2S = 1;
_bounse2P = millis();
}
}
bool _tmp1 = _bounse2O;
if (_tmp1) {
if (! _trgt1I) _trgt1 = ! _trgt1;
}
_trgt1I = _tmp1;
_gtv2 = _trgt1;
}
bool _isTimer(unsigned long startTime, unsigned long period )
{
unsigned long endTime;
endTime = startTime + period;
return (millis() >= endTime);
}
I will make a reservation right away. Surely many will have a question about the readability of sketches for the Arduino IDE. Sketches are automatically created by the program using a graphical programming environment. As I have already said, project authors have nothing to do with IT and programming. These are smart and economic people with straight arms and a clear understanding of what they need.
Now in development there are several more projects that I know of. These are greenhouse irrigation management, garage door management, combination lock and many other projects. If readers are interested, I will ask the authors to tell about their projects after their completion.