Underwater affairs - for robots
Intro
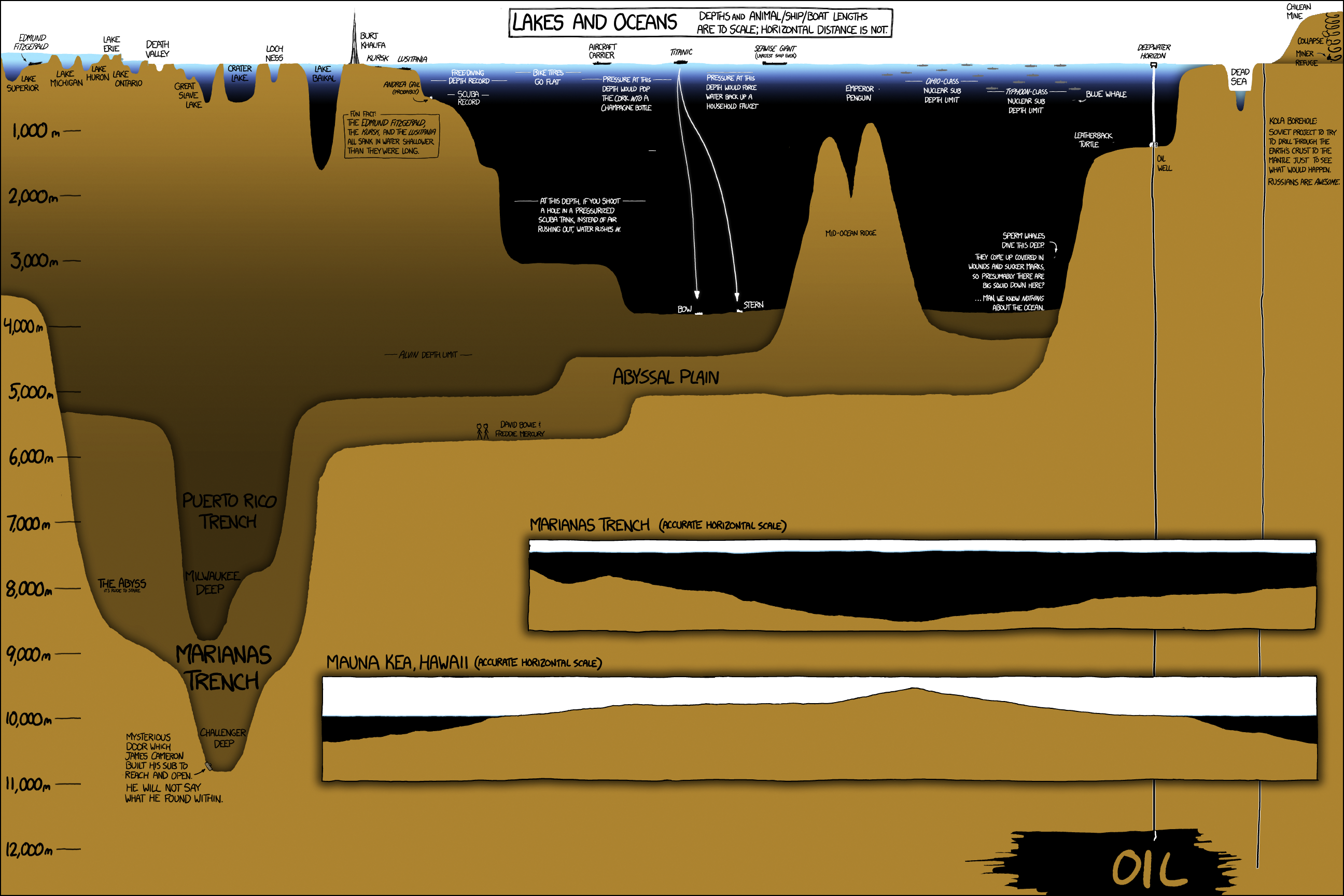
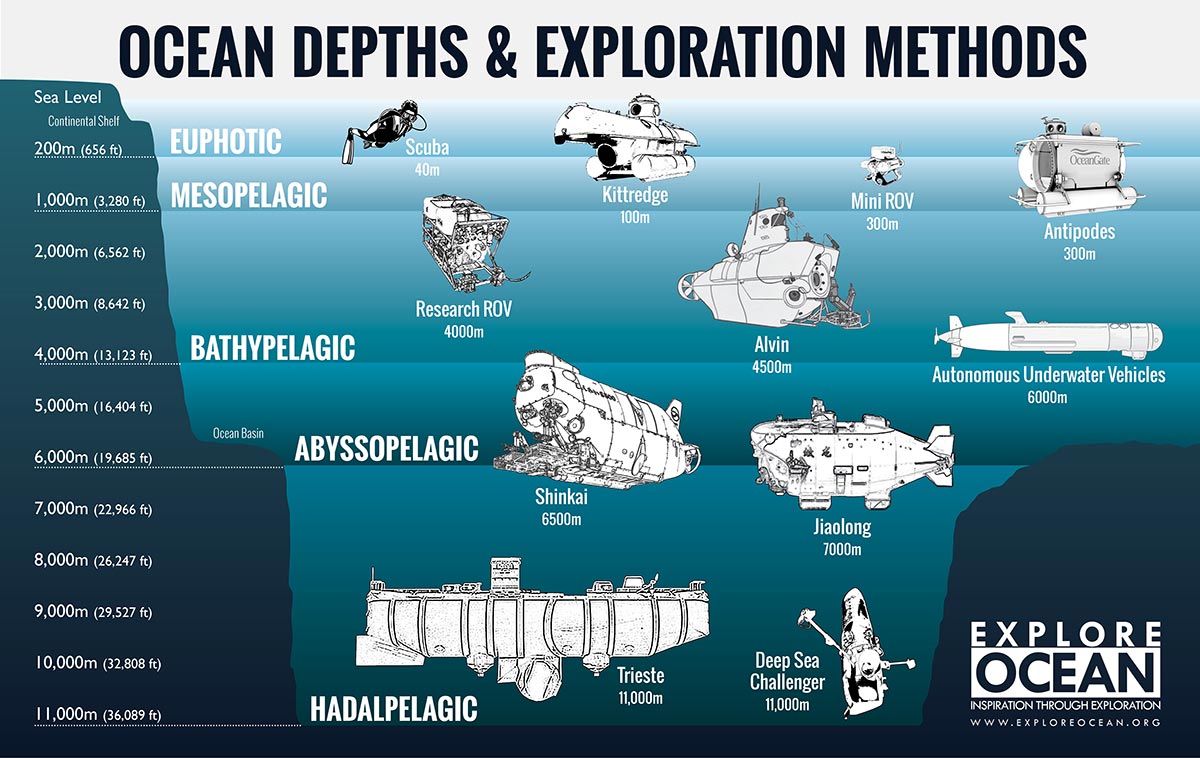
The surface of the planet is approximately 71% covered by oceans (about 361 million km²). The area of the Russian Federation is approximately 17 million km. The depth of the oceans is uneven, the following zones are distinguished:
Shelf (shelf - shelf) - depth up to 200–500 m;
Continental slope - depth up to 3500 m;
Ocean bed - depth up to 6000 m;
Deep water gutters - depth below 6000 m.
Average depth also differs:
Atlantic - 3600 m
Indian - 3890 m
North Arctic - 1225 m
Quiet - 4250 m
Why does a person climb under the water?
Historically, the first for food (fish, shellfish, arthropods, algae). Then for engineering work (construction of hydraulic structures, military operations). Recently, for the construction of linear facilities (pipelines (gas, oil) and submarine cables) and mining (gas, oil, iron-manganese nodules). For humans, the ocean is dangerous, but is useful as a source of good people.
How man conquered the depths
Breathing Diving
If the divers for pearls and other oysters have been at all times, then this immersion at considerable depths has become possible in the new time. In fairness, it is necessary to note the record depths of diving with freedivers [1]:
Immersion with a constant weight for breath-holding:
Men - 129 m (Alexey Molchanov, 2016-10-28)
Women - 104 m (Alessia Zechchini, 2017-05-10)
UPD:
Men - 130 m (Alexey Molchanov, 2018-07-18)
Women - 107 m (Alessia Zechchini, 2018-07-26)
From the AIDA website .
No-limits:
Men - 253.2 m (Herbert Nitsch, 2012-06-06)
UPD:
AIDA did not count the attempt.
Males - 214 m (Herbert Nietzsche, 2007-06-14)
From the AIDA website .
Women - 160 m (Tanya Streeter, 2002-08-17)
It is also necessary to understand that in order to achieve such results, people devote their whole life to training, while many die in an attempt to break the record.
The use of science and technology to work at depth

Lesbridge Diving Machine
In 1715, the Englishman John Lesbridge built an underwater vehicle, which was already the prototype of the modern hard spacesuit. The man was placed in a metal cylinder with a lid. There were three holes in the cylinder: two for the hands and a third for the viewing, into which glass was inserted. According to the descriptions, the inventor went down to a depth of 24 m and spent under water up to 34 minutes. Used the machine to lift valuables after shipwrecks.

Heavy diving suit
Then it is possible to single out the year 1819, when Kristjan Augustus Siebe was introduced to the first heavy diving suit, various modifications of which are used to this day.

For example, a three-bolt: this standard diving equipment has been used in the Russian Navy and civilian fleet from the 19th century to the present day. They are equipped with diving stations of sea and offshore diving bots, rescue ships and tugs. Does not isolate the diver from the pressure of the external environment (water). Equipped with intercom.
The record of diving in a heavy diving suit that we managed to find is 317 meters [2]. As part of working out the elements of the K-2 coursework problem (the operation of a single ship at sea for the intended purpose), the diving specialists of the rescue ship "Igor Belousov" of the Pacific Fleet of the Russian Navy in a deep-water training ground first made an experimental descent to the depth of 317 meters in the deep-water training ground.
ACS of the Navy and the command of the Navy based on the results of experimental descents to a depth of 305 m came to the conclusion that to ensure the safety of divers during descents by the method of short-term diving, the descents should be limited to 200 m, since at great depths the divers remained physically inoperable and that self-rescue submariners from a sunken submarine it is impossible to lift the buyrep from depths greater than 200 m [3].
Again, such depths are available after prolonged training and the use of pressure chambers for decompression.
Henry Fluuss Apparatus
Further, we can single out the Henry Fluuss apparatus of 1878, which can be called SCUBA.

Scuba
In 1945, Jacques-Yves Cousteau, along with Emile Ganian, patented scuba gear. Scuba diving is now used by most diving enthusiasts, professional divers and lifeguards.

Aqualung: 1 - Hose, 2 - Mouthpiece; 3 - Valve (reducer); 4 - Shoulder belt; 5 - dorsal scute; 6 - Tank (gas cylinder)
The diving record currently belongs to Ahmed Gabr. He managed to reach the mark of 332.4 meters below the surface of the Red Sea near the city of Dahab. The whole dive took 14 hours (the ascent most likely lasted at least 10 hours).
And again, such records require long-term preparation, a pressure chamber and a large support team.
What is the maximum depth to which a person can plunge, testing the pressure of a water column at this depth?
COMEX
534 m in open water 1988, Marseilles, France [4], using the breathing mix COMEX Hydra 8 (49% hydrogen, 50% helium, 1% oxygen) for a total of 6 people (4 COMEX divers, 2 from the French Navy). At first 8 days in the pressure chamber gradual increase in pressure to 53 atmospheres. Further, all 6 divers worked at depths from 520 m to 534 m. Once an exercise was performed on the connection of pipes. After completing the planned tasks for 18 days, the divers were decompressed in the pressure chamber.
701 m in the experimental pressure chamber 1992, Marseille, France [5]. Experiment Protocol:
- 4 weeks of preparatory period before “immersion”
- Two-day insulation at a depth of 10 m
- 13 days to reach a pressure corresponding to a depth of 675 m using a COMEX Hydra 8 breathing mix (49% hydrogen, 50% helium, 1% oxygen).
- 3 days in pressure between 650 m and 675 m
- Then one of the divers, Theo Mavrostomos, moved to a separate pressure chamber and continued diving to a depth of 701 m using the COMEX Hydro 10 breathing mix, where he stayed for 7 hours.
- Then 24 days decompression.
- And 2.5 months of observing the experiment participants.
Apparently, the pressure at a depth of more than 700 meters using the mixture of gases for breathing is the ultimate.
There are research on liquid breathing technology. For this purpose, liquid perfluorocarbon with oxygen and carbon dioxide dissolved in it is used in experiments. As of the date of publication, experiments on laboratory animals are underway.
It is worth recalling about the average depths of the oceans from 1250 m to 4250 m.
Rigid diving suits
The next branch for the conquest of the depths is the creation of costumes that support normal atmospheric pressure for a person and protect against environmental pressure.
According to GOST R 52119-2003: A rigid diving suit is designed for underwater observation and diving work by an operator under normal internal pressure (Diving Technique. Terms and definitions).
Equipment designed for deep-water (up to 600 meters) work, during which the usual atmospheric pressure acts on the diver, eliminating the problem of decompression, eliminating nitrogen, oxygen and other poisonings. Historically, the following products can be distinguished:
Diving suit of brothers Karmagnol
A diving suit with 20 small portholes of Alphonse and Theodore Carmagnol, Marseille, France, 1878. The spacesuit was supposed to be able to safely submerge a person to a depth of 60 m. However, he never worked properly and constantly leaked. Now located in the Museum of the WFM of France.

Costumes "Neufeld and Kunke"
Three generations of diving suits of the German company "Neufeld and Kunke", 1917-1940.
The suit of the third generation (produced between 1929 and 1940) allowed to dive to a depth of 160 meters and was equipped with a built-in telephone. The development of the company "Neufeld and Kunke" formed the basis of the hard suit of the Italian Roberto Galeazzi in the early 30s of the last century, including the use of the military fleet of the newly formed Soviet state.

1-man sub
1933, Mini-submarine for one person. A spacesuit that allows a diver to work for a considerable time at a depth of 300 meters without a long decompression process.

Jum suit
JIM suit 1974, Hard space suit. The spacesuit was used in the 70s of the last century in the oil industry. In 1979, the woman diver, Sylvia Earl, set a world record in this spacesuit. She descended to 381 meters and walked on the seabed for two and a half hours.

Newtsuit
1985, development led by Phil Newten. Tested to a depth of 900 m, certified to a depth of 300 m.

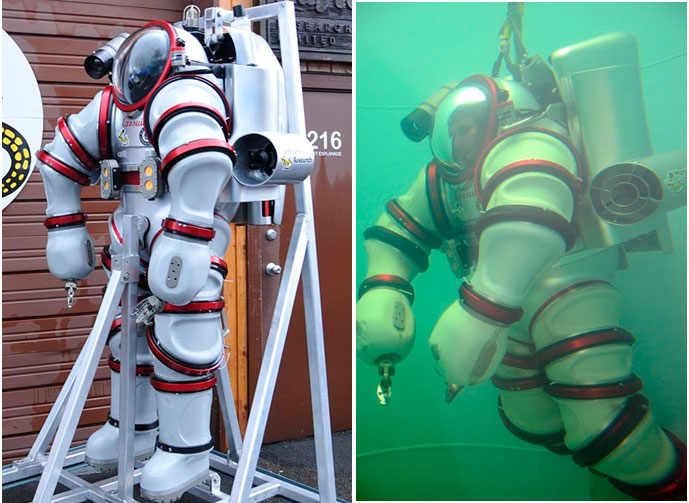
Exosuit
Exosuit is a 240-pound two-meter suit made of aluminum alloy, which allows a person to work at a depth of up to 305 meters. To increase mobility and help weak human hands and feet, Exosuit is equipped with 4 propulsion units of 1.6 hp each. (with the possibility of increasing to 8), as well as 18 compounds that provide the mobility of the hands. The “sleeves” of the spacesuit can be equipped with various interchangeable nozzles: a gripper, a cutter, a drill, etc.
A feature of Exosuit is a completely autonomous life support, while oxygen and electricity are supplied from the ship to most similar undersea space suits. Exosuit has an oxygen regeneration system that cleans the air from carbon dioxide and replenishes it with oxygen. The system has an autonomy of 50 hours. In Exosuit, a person breathes normal atmospheric air under normal pressure, which eliminates unnecessary risk and a long decompression procedure. The cost of Exosuit is $ 1.3 million.
Atmospheric Diving System (ADS 2000)
ADS 2000 was developed jointly with OceanWorks International and the US Navy in 1997 to meet the requirements of the US Navy. Housing forged aluminum alloy T6061, improved swivel design. Able to work at a depth of 610 m for 6 hours, it has an autonomous automatic life support system. The integrated dual steering system allows the pilot to easily navigate underwater. He was certified by the US Navy on August 1, 2006, when the main naval diver, Daniel Jackson, plunged to a depth of 2000 feet (610 m).


Even with the use of space suits, a person can dive to a depth of 610 m.
And what about the submarines?
Modern submarines allow you to plunge to a depth of about 600-650 m. Clickable The absolute submarine Komsomolets remains the absolute record holder of maximum immersion, in 1985 the submarine reached a depth of 1027 meters below the sea surface. The working value for it was 1000 m, and the calculated value was 1250 m. The fate of the submarine was tragic in the future. "Komsomolets" sank in 1989 due to a strong fire that started at a depth of about 300 meters. And although he, unlike the “Trecher”, managed to emerge, the story still turned out to be very tragic. For diving a person to a depth of over 600 meters, bathyscaphes were developed.

Bathyscaphes
FNRS-2 and FNRS-3

The FNRS-2 was the first bathyscaph created by Auguste Piccard, Switzerland. Work on the creation of the bathyscaphe began in 1937 and was interrupted by the Second World War. Bathyscaphe was completed in 1948. Named after the Belgian National Research Foundation (Fonds National de la Recherche Scientifique).
The actual construction of the FNRS-2 was carried out in 1946-1948. The bathyscaphe was damaged during sea trials in 1948 near the Cape Verde Islands.
In the open sea, the FNRS-2 bathyscaphe set off on a 3,500-ton Belgian vessel Scaldis. However, the Scaldis crane was not powerful enough to pull FNRS-2 out of the water with gasoline-filled float tanks. An unmanned test dive of 1400 m was successfully accomplished, but due to technical problems it was not possible to empty the float tanks from gasoline. It was decided to tow the FNRS-2 back to the port, but the bathyscaphe broke waves on the sides of the vessel and gasoline flowed out of the float tanks. After the discovery of a leak, gasoline was discharged into the sea, and FNRS-2 was raised on board the vessel. Further tests were curtailed due to lack of funds for repairs.
After the cessation of funding in 1948, FNRS-2 was sold to the French navy. French specialists repaired FNRS-2 and renamed it FNRS-3. In February 1954, the FNRS-3 reached a depth of 4,050 meters in the Atlantic, 160 miles from Dakar, the previous Picard record was 3,150 meters in 1953.
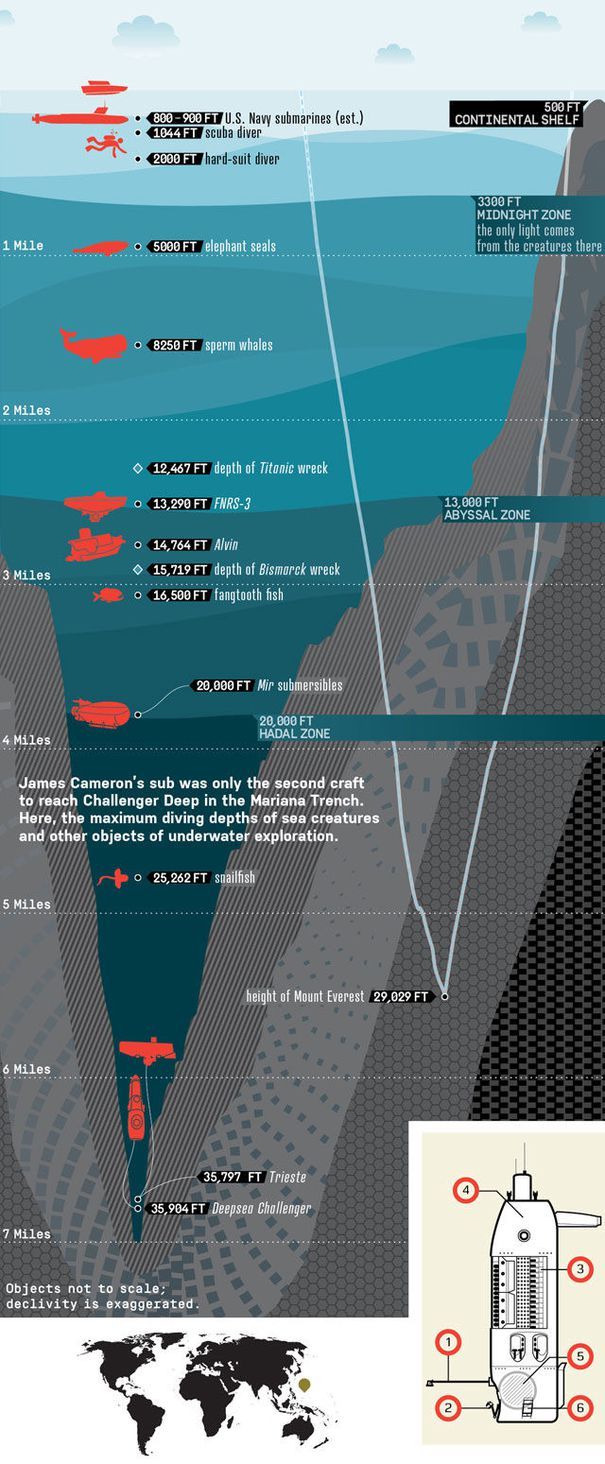
Trieste

Designed in Switzerland, built in Italy deep-sea inhabited research bathyscaphe. Designed by Auguste Pikkar. Trieste was lowered into the Mediterranean on August 26, 1953 near the island of Capri. The project was based on the previous experience of using the FNRS-2 bathyscaphe. Trieste was ruled by the French fleet. After several years of operation in the Mediterranean, Trieste was purchased in 1958 by the United States Navy for $ 250,000. Initially, the scope of the crew was designed to dive up to 4000 m, but the US Navy ordered from Krupp the manufacture of a scope capable of withstanding a dive of 11000m.
During the implementation of the Necton project on January 23, 1960, Jacques Picard and the US Navy lieutenant Don Walsh dived to a depth of 10,919 m. Thus, for the first time, they managed to conquer the Challenger Abyss in the Mariana Trench.
Archimède

The development of the bathyscaphe with the tentative name B11000 (Bathyscaphe 11,000 meters) began in 1957 in the arsenal of Toulon. Funding was provided by the National Center for Scientific Research of France (CNRS) and the Belgian National Foundation for Scientific Research (FNRS). The project was led by Pierre Wilm, and FNRS-3 captain Georges Wo led a significant part in the design. "Archimedes" was intended to dive to the bottom of the Mariana Trench, but the bathyscaphe "Trieste" ahead of "Archimedes"
Shinkai

Shinkai - manned underwater vehicle, the depth of the dive to 600 m. Launched in 1970, until 1981 had the greatest depth of immersion among Japanese ships. Owned and managed by the coast guard in Japan.
Shinkai 2000 - 1981 year of construction. The maximum depth of 2000 m.
Shinkai 6500 - 1990 year of construction. Extreme depth of 6500m.
Search-6

The inhabited self-propelled deep-water underwater vehicle of the Poisk-6 type 7 AS-7 Poisk-6 project, designed in 1906, was designed by the Ruby LMPB and Malachite SPMBM and built at the Novo-Admiralty Plant in Leningrad in 1975-1979. Tests of the apparatus were carried out on the Black Sea and in the Pacific Ocean, and the immersion depth of 6,000 meters was exceeded. Tests of the device revealed its significant design flaws and were accompanied by repeated equipment failures. As a result, in September 1987, the state selection committee, taking into account the physical and moral aging of the AS-7 apparatus, did not accept it as a member of the USSR Navy, and further work recognized it inappropriate.
World-1 and World-2
Perhaps the most famous underwater bathyscaphes.

Mir-1 and Mir-2 are two Soviet and Russian research deep-sea inhabited apparatus for oceanological research and rescue work. The main ideas on the design of the device, the arrangement of its individual systems, components, elements, the acquisition of scientific and navigation equipment belong to I. E. Mikhaltsev, his deputy A. M. Sagalevich and the chief engineer of the project from the Finnish shipbuilding company Sauli Ruohonen, who headed the group of Finnish engineers and technicians who participated in the construction of devices. The deep-sea apparatuses were manufactured in 1987 by the Finnish company Rauma-Repola Oceanics, and the contract for the creation of the apparatuses was signed on May 16, 1985, and the acceptance certificate - December 17, 1987, after successful test dives in the Gulf of Bothnia and in the Atlantic Ocean to a maximum depth of 6,170 meters (“Mir-1”) and to a depth of 6,120 meters (“Mir-2”). Of great importance for scientific research is the working depth of the “Worlds” - 6000 meters, thanks to which these devices can reach depths where 98.5% of the bottom of the World Ocean is located. The cost of building each unit in 1987 amounted to 100 million Finnish marks (17 million euros).
Jiaolong

"Jiaolong" is a Chinese non-floating, deep-sea manned apparatus. During the period from May 31 to July 18, 2010, he made 17 dives in the South China Sea, the deepest of which was to a depth of 6759 meters. This event made China the fifth country after the United States, France, Russia and Japan, which has modern diving technology to a depth of more than 6,500 meters.
Deepsea challenger
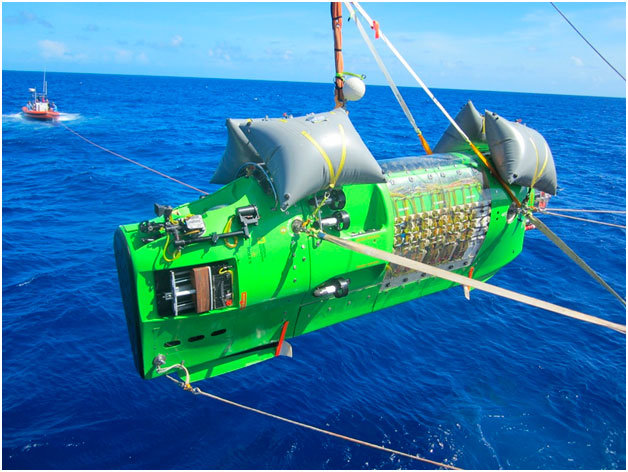
Deepsea Challenger (DCV 1) - a bathyscaphe, on which, on March 26, 2012, Canadian director James Cameron single-handedly dived into the "Challenger Deep" (Mariana Trench). The submarine was built in Sydney, Australia by design and research company Acheron Project Pty Ltd. and contains scientific equipment and high resolution 3D cameras. Deepsea Challenger was secretly built in Australia, in collaboration with National Geographic and with the support of Rolex. The Scripps Institute of Oceanography, the Jet Propulsion Laboratory and the University of Hawaii assisted in the construction of the bathyscaphe and the implementation of the mission. The construction was led by Australian engineer Ron Allum. The estimated cost of the device is 7 million dollars.
In the bathyscaphe, a person can dive to any depth in the ocean and even carry out manipulations on the water and raise something, but the cost of the bathyscaphes themselves and their maintenance is quite high.
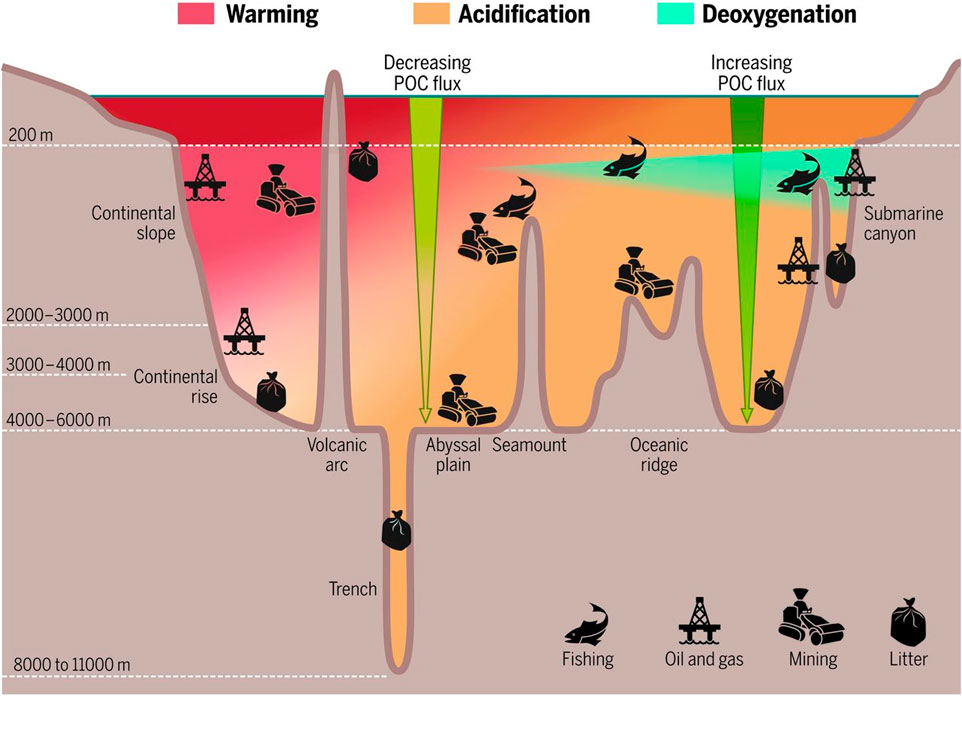
Using the power of the ocean.
The picture briefly shows the main areas of work in the ocean, not including search and rescue:
- the cultivation and extraction of seafood (fish, shellfish, arthropods, algae);
- hydrocarbon production and transportation (oil, gas, gas hydrates);
- extraction and transportation of ore from iron-manganese nodules;
- disposal of hazardous waste;
- construction and repair of linear structures (submarine fiber optic cables, submarine electrical cables, pipelines);
- underwater search and mapping.
Construction and repair of linear structures
The Spanish electricity supplier Red Eléctrica de España has implemented a high-voltage direct current (HVDC) transmission system that connects the island of Mallorca to the unified power grid of continental Spain.
A 244-kilometer high-voltage power line system connects the Morvedre area (near Valencia) with the village of Santa Ponsa, located near the capital of Majorca, Palma de Mallorca. Electric power of 400 MW is transmitted via cable running along the seabed, the minimum transmission loss of direct current: 250 kW.
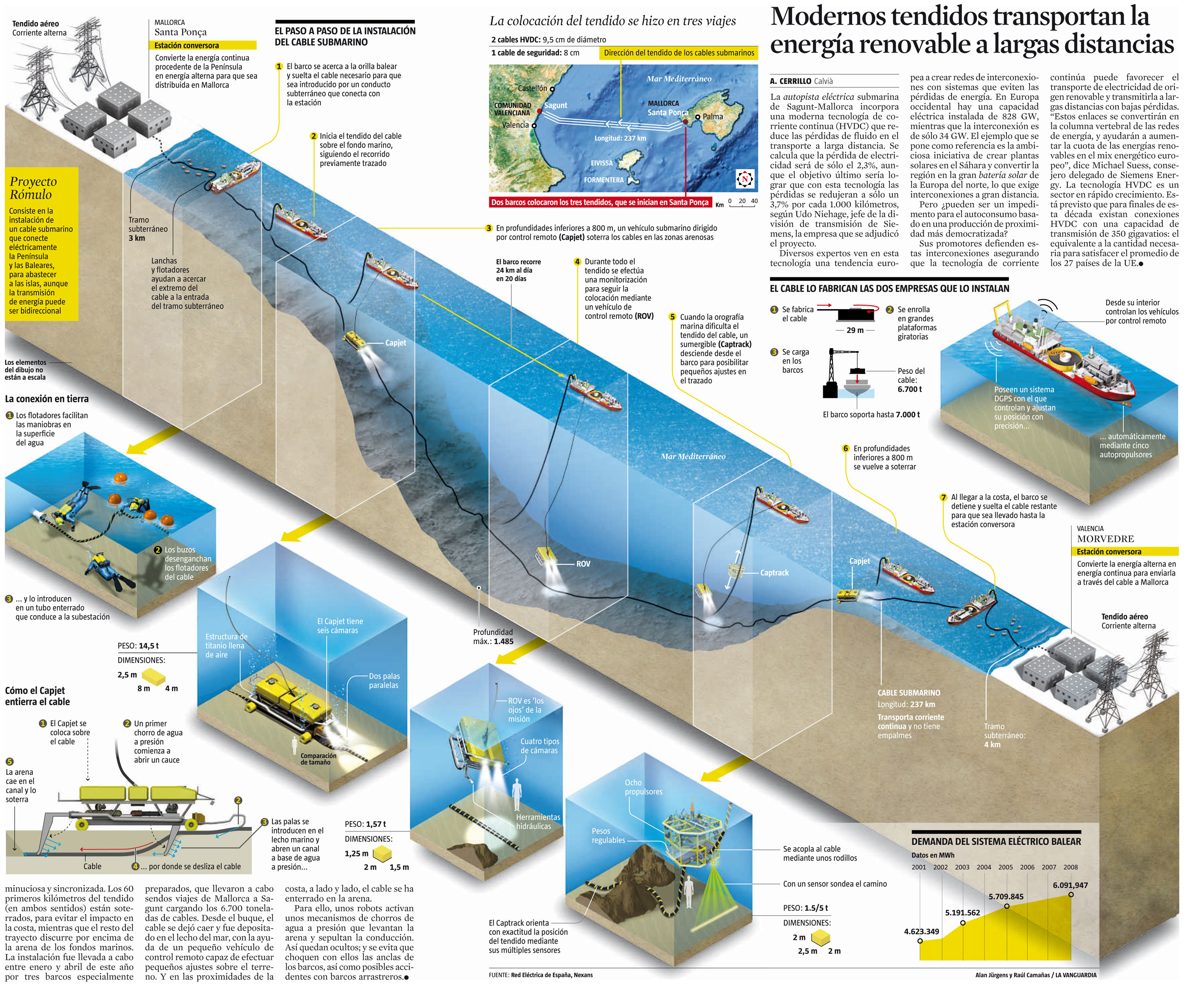
As you can see in the figure, special mechanisms were used when working at depths. A special capjet apparatus [6] is used for cable laying, the laying is controlled by unmanned remotely operated underwater vehicles (ROV).
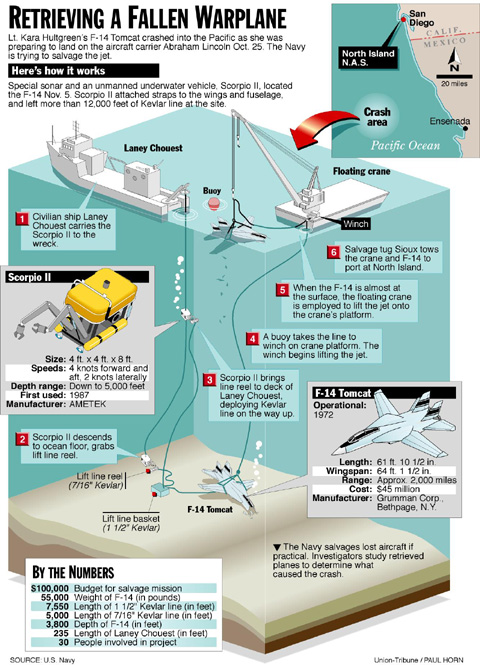
Approximately also laying of communication cables:

The operation to lift the F14 Tomcat fighter from a depth of 1140 m near the Mexican coast. During the operation, remote-controlled underwater vehicles were used.
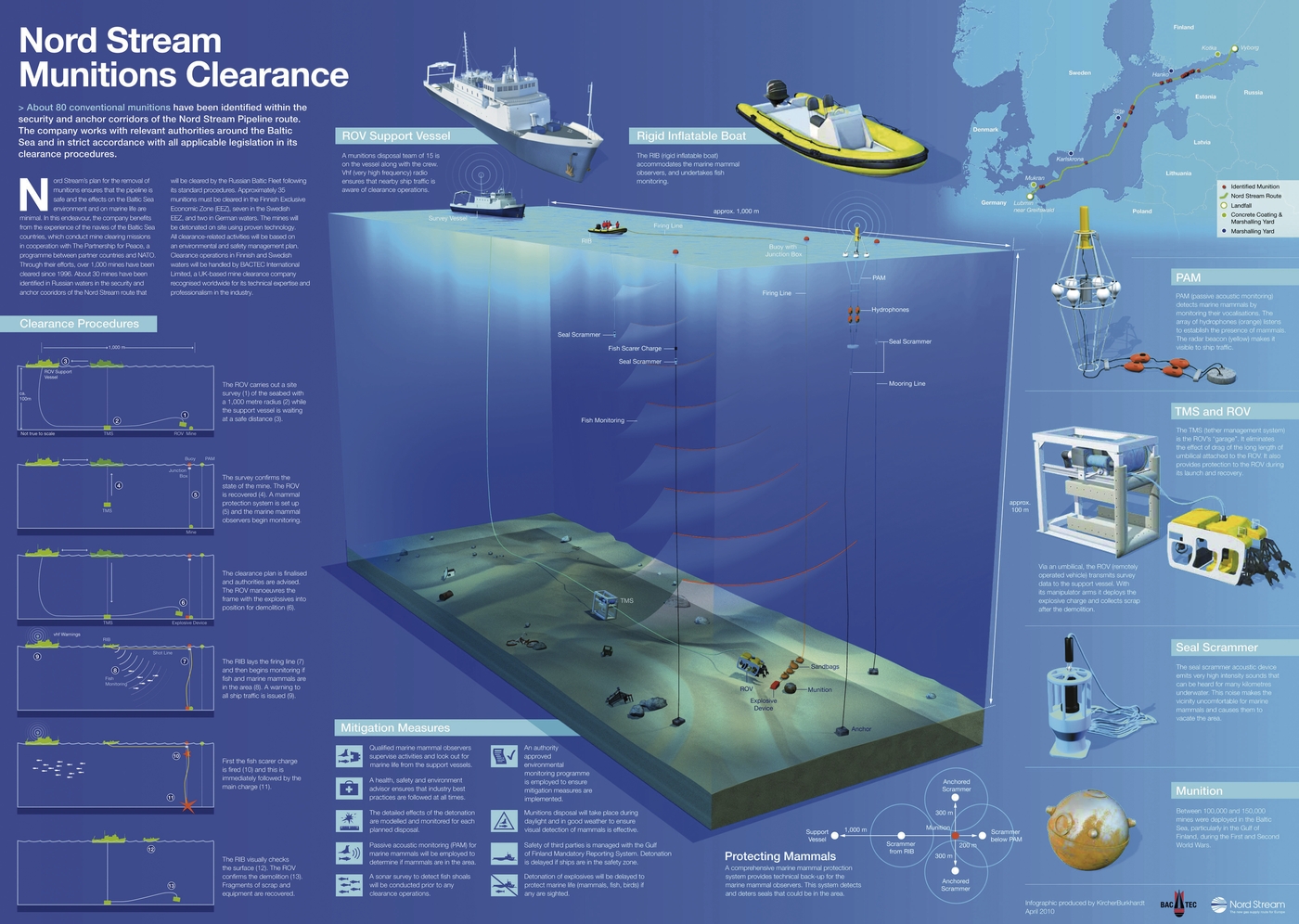
Clearing the bottom from the surprises of war during the construction of the northern stream:
Oil production on the shelf:
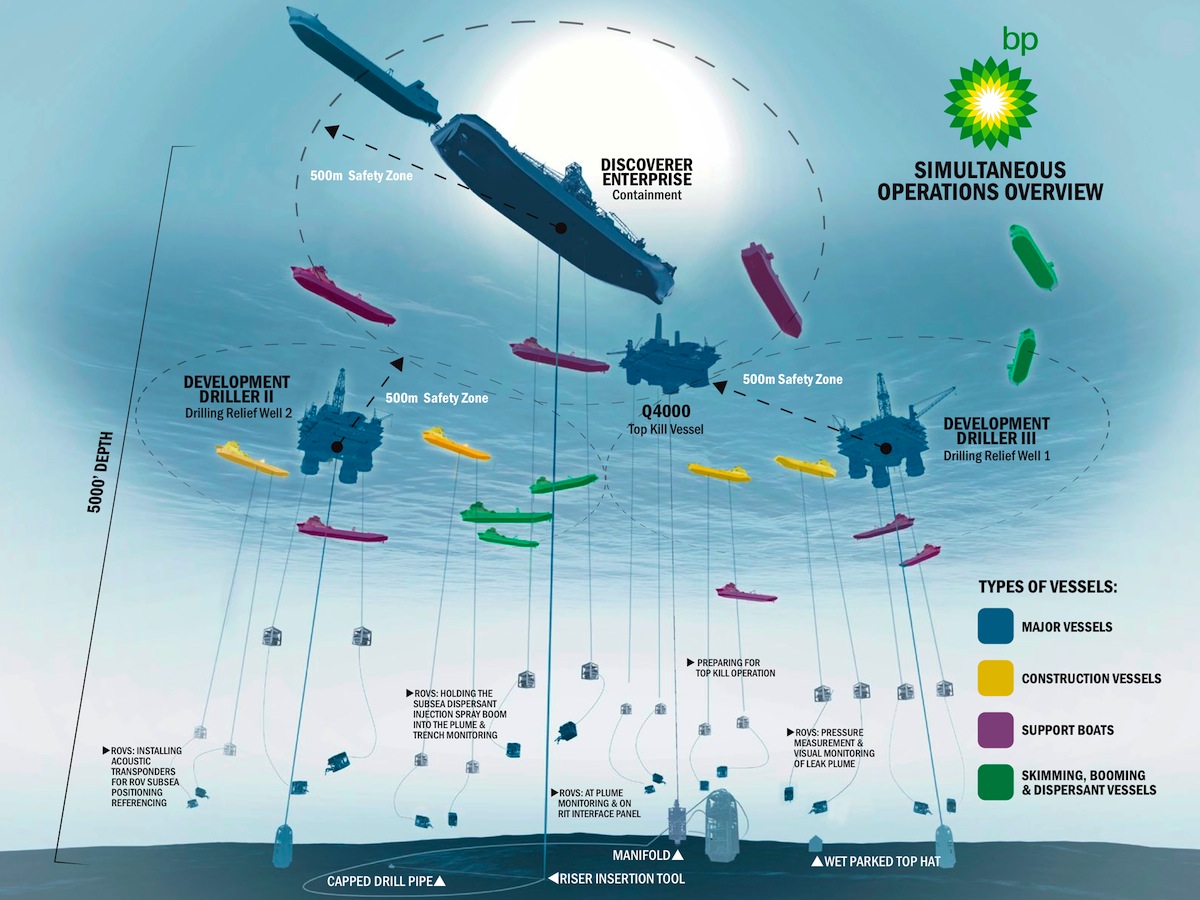
Approximately also, with the help of remote-controlled vehicles, the Shtokman field is being developed.
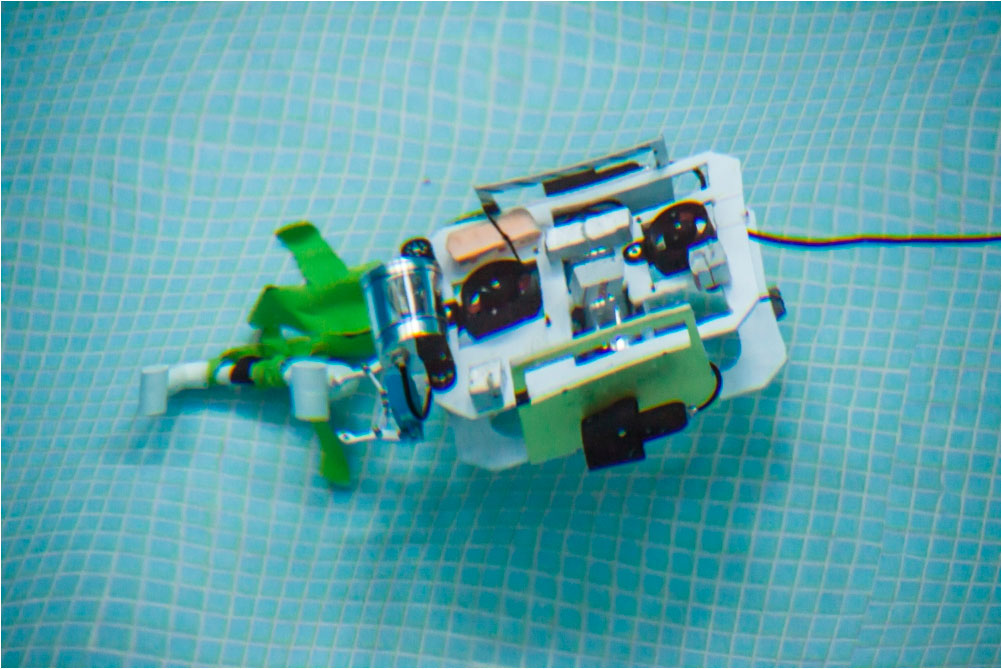
So the device looks alive:

So they are governed by:
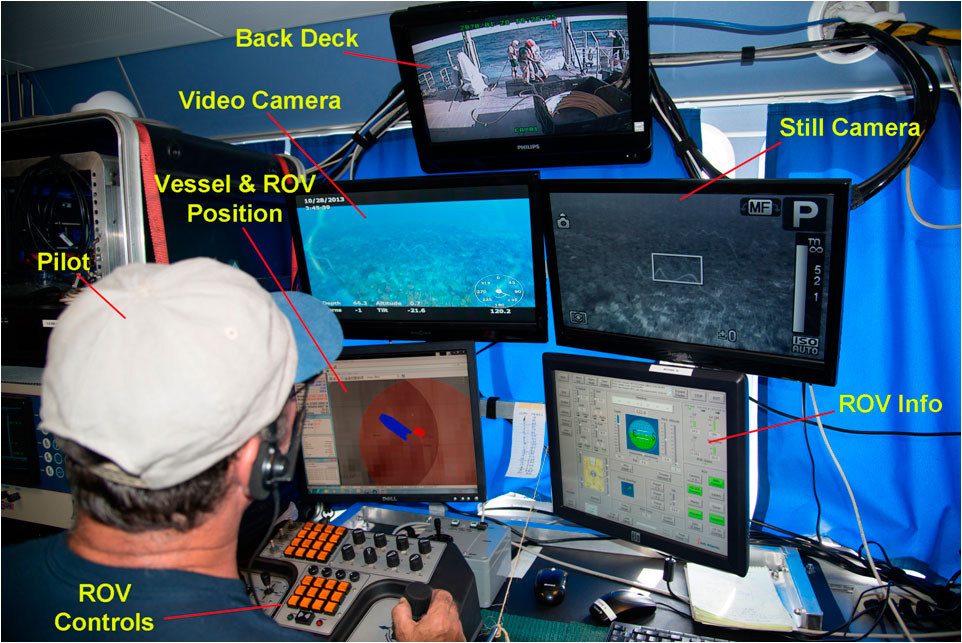
And this is what the operator sees:

Remote control vehicles (ROV) are made of different classes with different depth of immersion. There are those that can be lowered to 4000 m, there are those that cannot be more than 300 m, their cost also differs by orders of magnitude. If the devices that are suitable for work at a great depth cost from 1 million dollars, the devices that operate at depths of up to 300 m cost several tens of thousands of dollars in industrial design.
In addition to the remote-controlled vehicles, autonomous, unmanned underwater vehicles (AUV) are used. Basically, they are used for search operations, until July 2018, from 2014 in the Indian Ocean, they searched for the missing plane of Malaysian airlines using such devices.

Autonomous underwater vehicles are used to monitor the condition of underwater linear structures (pipelines, cable lines), to map the bottom surface and conduct scientific research over a large area. Most of the autonomous vehicles are made in the form of a torpedo in order to reduce the frontal resistance of water and thereby increase the duration of work under water on one battery charge.

Hybrid systems are also being created, since stand-alone devices that can be connected by cable to supply power and image from cameras and data from sensors in real time. In the next 5 years, it is assumed that AUV will force out ROV when working on the shelf and inspecting pipelines, since to work with ROV requires a vessel with dynamic positioning, which can cost up to $ 250,000 per day, while the work of industrial AUV costs $ 30,000 per day [7]. But such a replacement requires a powerful onboard computing system, a productive video system, powerful and capacious batteries, accurate sensors and sonars, as well as the development of algorithms that can perform all those tasks in an autonomous mode that the ROV operator performs in remotely controlled mode.
Extraction of ferromanganese nodules
Ferromanganese nodules are authigenic mineral concretions of iron and manganese hydroxides, as well as other elements at the bottom of lakes, seas and oceans. The most widespread in the pelagic regions of the oceans. For the first time studied by the English expedition on the ship "Challenger" in 1872-76. Detailed information on ferromanganese nodules (spatial distribution, facies formation, petrography, mineralogy and geochemistry) was obtained from studies of the seabed of the World Ocean conducted by researchers from various countries (United Kingdom, CCCP, USA, Germany, Japan, etc.) during the International Geophysical Year (1957-1958) and in subsequent years.
The estimated reserves of the three oceans are 200 billion tons, 45 billion tons are contained in the Atlantic Ocean, 112 billion tons in the Pacific, and 41 billion tons in the Indian Ocean. The deposits located at relatively shallow depths and are typical varieties of manganese deposits are found at a depth of 400 meters off the coast of Bahia, California and Japan. Concretions off the coast of Japan are located at a depth of 100 to 360 meters in the upper layer of the seabed along the Ausu archipelago near Tokyo.

Nautilus Minerals Ltd. builds a special vessel for processing ore, lifted from the ocean floor [7].

Iron-manganese nodules of the World Ocean contain on average the following ore components (%): Na 1,9409; Mg 1,8234; Al 2.82; Si 8.624; P 0.2244; K 0.6427; Ca 2.47; Ti 0.647; V 0.0558; Cr 0.0035; Mn 16.02; Fe 15.55; Ni 0.480; Co 0.284; Cu 0.259; Zn 0.078; Sr 0.0825; Zr 0.0648; Mo 0.0412; Tl 0.0129; Pb 0.0900. Characteristic is the presence of Ag, Ir, B, Cd, Yb, W, Bi, Y, Hg and other elements whose concentrations significantly exceed the average values for the earth's crust. In terms of the average contents of the main ore components (Ni, Cu, Co, Mn), ferromanganese nodules within the individual regions studied are comparable to ore deposits developed on the continents.
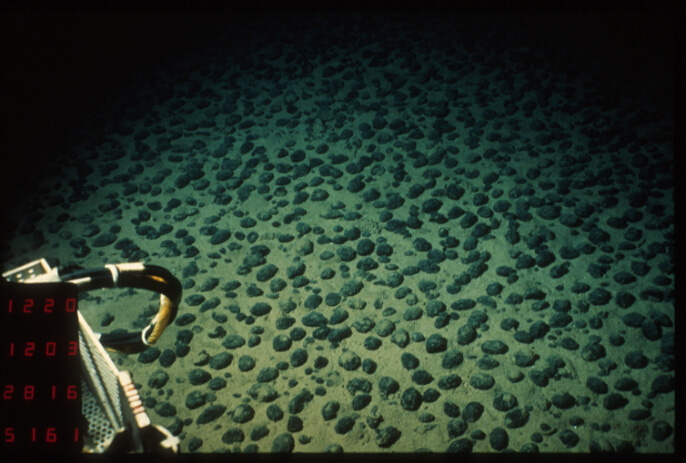
On the surface, the ore looks like this:

Very soon, promise to establish industrial production.
Interest
In general, underwater vehicles or robots from 2015 are considered as the new cutting edge of robots (The Next Big Drone Frontier) [8].
According to forecasts, the market for uninhabited underwater vehicles (UUV) will reach $ 5.20 billion by 2022, with a CAGR of 14.07% from 2017 to 2022. The growth of the market can be explained by the increase in the number of deep-sea offshore oil and gas production and an increase in threats to maritime security.
In general, interest in underwater robotics is quite high in the United States, China, the EU and Singapore.
Patent research confirms this.
Geography of countries that have registered patents in the field of underwater robotics:
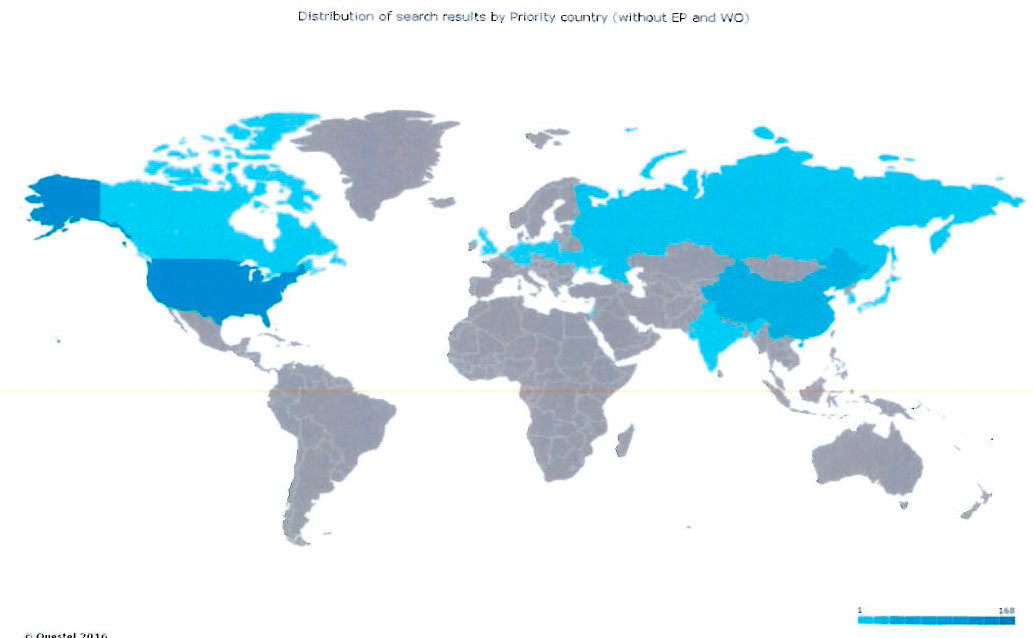
Distribution by the number of applications submitted:

It can be seen that China has escaped to the first place now and in a few years we will see developments in hardware and further in the growth of economic indicators.
Segmentation of technologies used in this area:

List of manufacturers of underwater robotics .
Naturally, work is being done with students and schoolchildren. Indeed, in the next few years, all these developments will go into industry and will require specialists to work with the created underwater vehicles.
Indicator of the presence of such work is the presence of competitions in underwater robotics:
- MATE International ROV Competition (annually since 2002)
- AUVSI RoboSub Competition (annually since 1997)
- Singapure AUV Challenge (annual since 2013)
- Student Autonomous Underwater Challenge-Europe (SAUC-E) (annually since 2006)
MATE International ROV Competition

The most massive competition. In the US, about 600 educational institutions claim participation in qualifying rounds. They are divided into school and student competitions in various classes:
- Explorer - student;
- Ranger - senior students;
- Navigator - high school;
- Scout - younger students.
Teams from Vladivostok successfully perform:
Russian team in international competitions in underwater robotics (2009)
The DVFU ROV Team 2010 The
Russian team became the two-time world champion in underwater robotics (2012)
2013
Schoolchildren Center for Robotics Development (2015)
Schoolchildren and students Center robotics development (2018)
ROBOSUB

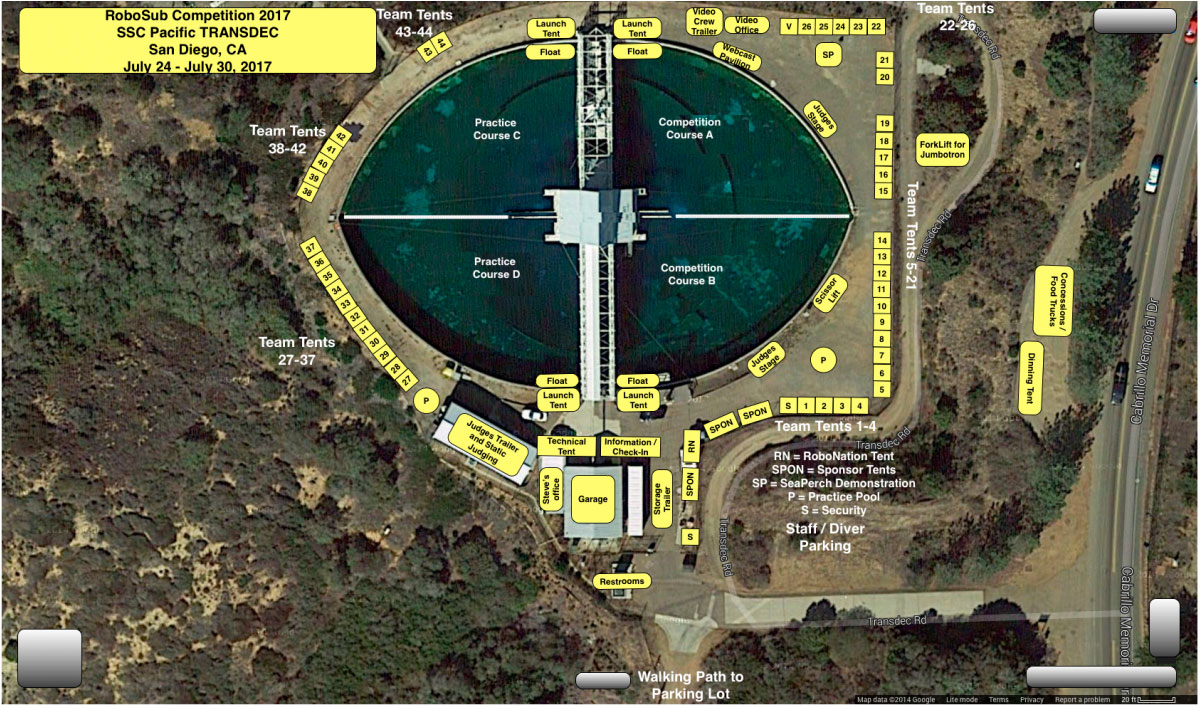
The most prestigious competition for students. Sponsored by the Unmanned Vehicle Fund Association and the Office of Naval Research. Participating student teams from around the world. In 2018, the Chinese won the Harbin Engineering University, the second place National University of Singapore. Students of the FEFU and the Moscow State University are successfully performing. Nevelsky.
RoboSub 2012 reconnaissance in battle and reaching the final
Singapure AUV Challenge
Competition for autonomous underwater vehicles. Participating students of the APR countries. Students of FEFU successfully perform.
Student Autonomous Underwater Challenge-Europe
Unfortunately, I do not know the participants from Russia.
What about us?
Up to 600+ teams, like in the USA, are still far away for us, but there is also interest:
- MATE ROV Competition Vladivostok (qualifying for the big MATE, since 2015);
- VRO Aquatic IRS (in Innopolis since 2016);
- Olympiad NTI water profile (since 2017);
- The first all-Russian competition in underwater robotics Vladivostok 2018 (August-September 2018);
- The first competition in underwater robotics for students of grades 1-4 (2018-2019 year).
MATE ROV Competition Vladivostok
Held in Vladivostok on the basis of the basin of Moscow State University. Nevelsky. Registration from December to March .
Description here .
News here and here .
Video here .





VRO Water IRS
Conducted as part of the finals of the All-Russian Robotic Olympiad in the city of Innopolis at the end of June. For 2019, it is not yet known whether Innopolis will hold the final VRO.
Registration opens in spring .
Olympiad NTI water profile
Registration has already begun
The first all-Russian competition in underwater robotics Vladivostok 2018 (Aquarebotech 2018)
Already passed. You can read about them here and here .
See here .
The first competition in underwater robotics for students of grades 1-4
Contest rules here .
Registration ends September 30th .
Sentence
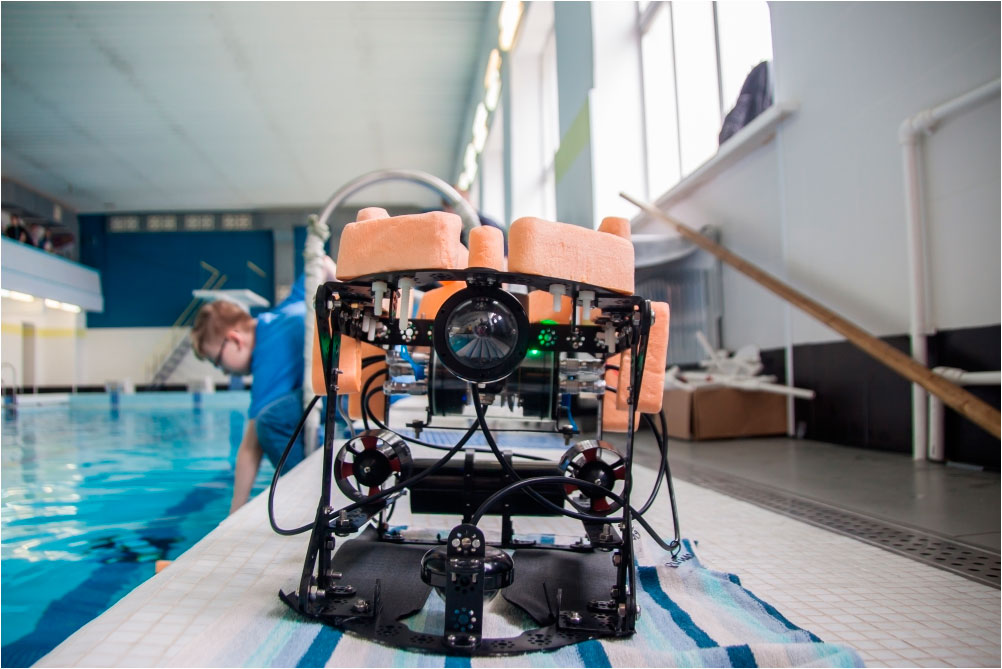
We can offer the following kits for practicing underwater robotics:
- Micro Underwater Robot ( MUR ) - recommended set for NTI and VRO.
- Set for assembly of the remote-controlled robot MUR MiddleROV
- Set for assembly of the remote-controlled robot MUR ElementaryROV
- MUR HighROV - for participation in MATE (on request)
Read more on the website of the Center for Robotics
Sources
[1]https://en.wikipedia.org/wiki/Freediving
[2]https://topwar.ru/128503-vodolazy-tof-ustanovili-rekord-po-glubine-pogruzheniya.html
[3]http://www.dive-tek.ru/archiv/2008/2/38-41.html
[4]http://divingalmanac.com/deepest-saturation-dive-open-sea/#!
[5]http://divingalmanac.com/deepest-saturation-dive-experimental/
[6] http://www.nortech.com/pdf-subsea/Capjet%20trenching%20system.pdf
[7]http://nus.live.irmau.com/irm/content/default.aspx
[8]http://sophiccapital.com/wp-content/uploads/2016/02/Sophic-Capital-Second-Underwater-Drones-Report.pdf
[2]https://topwar.ru/128503-vodolazy-tof-ustanovili-rekord-po-glubine-pogruzheniya.html
[3]http://www.dive-tek.ru/archiv/2008/2/38-41.html
[4]http://divingalmanac.com/deepest-saturation-dive-open-sea/#!
[5]http://divingalmanac.com/deepest-saturation-dive-experimental/
[6] http://www.nortech.com/pdf-subsea/Capjet%20trenching%20system.pdf
[7]http://nus.live.irmau.com/irm/content/default.aspx
[8]http://sophiccapital.com/wp-content/uploads/2016/02/Sophic-Capital-Second-Underwater-Drones-Report.pdf