Simple but smart robotic arm
- Transfer

Joke for the Nerds: if you want to survive at the end of the world, started by robots, just close the door. Robots have done a lot of things - accuracy, speed, consistency - but still can not cope with door handles, and other simple things. Part of the problem is that they have to move around the world created for people and for human hands. And the hand is one of the most complicated mechanical structures of nature.
However, soon cars, apparently, will be able to do this. Researchers from the University of Pisa and the Italian Institute of Technology have developed a surprisingly simple, and incredibly clever roboruku, known as SoftHand 2, working from just two motors. Compare with the Shadow Dexterous Hand, hypnotically deft, but powered by 20 motors. SoftHand promises robots that soon everything will be seized by them, and, moreover, much cheaper.
Like other roboruks, SoftHand uses tendons in the form of cables that tighten up fingers. But they are completely different. Instead of a pile of cables stretched to each finger, there is only one in the hand, writhing over the many blocks located in each finger. She has a bit less dexterity, but this greatly cuts cost and energy consumption. And this is normal - there is no single universal technology suitable for all robotic manipulators. In certain cases, more sophisticated roboruks will also find use — as will Softho and him.
To create a hand, researchers first created a simpler version of SoftHand with just one motor. “The idea is that when you turn on the motor, the length of the cable decreases, which causes it to tighten its grip,” says the robot-guard, Cosimo Della Santina, who helped design the system.
Release the tendon, and the fingers will be re-extended into the open palm, due to the elasticity of the joints. This works great when you, for example, need to grab the ball. But since the fingers move synchronously, more subtle manipulations of the hand are inaccessible.
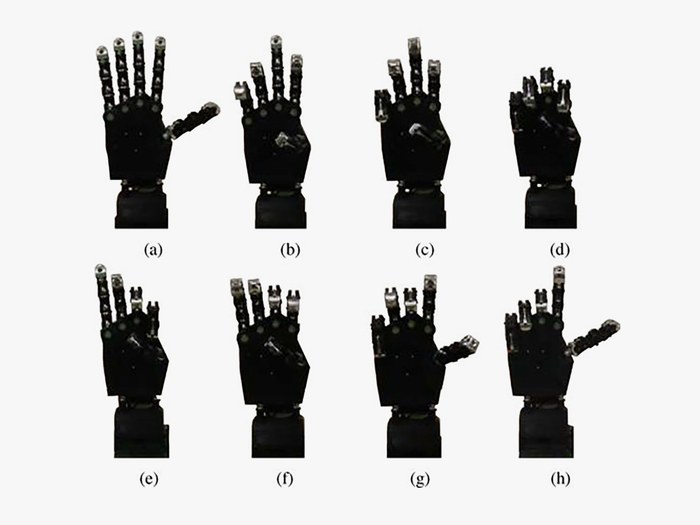
Adding a second motor significantly increases the softness of SoftHand 2. Look at the image above. Each end of the cable, still curling through all the fingers, is connected to one of the two motors located in the wrist. If you start the motors in one direction, the cable is shortened and gestures from the top row are obtained, A, B, C and D - according to the same principle as SoftHand.
But if you start the motors in different directions, it turns out something more complicated - E, F, G and H. In this case, one motor releases the cable, and the other chooses. “When the cable is moving across multiple blocks, the cable tension does not remain constant,” says Della Santina.
If the cable pulls one motor, the tension at the end closest to it will be greater. If the other motor releases the cable, at its end the tension will be less. By playing tension in this way, you can work with SoftHand with a much smaller number of cables than is commonly used in roborukh, and yet make your fingers move.
Look at the above animation, and you will see the difference, which brings the second motor. On the left hand, there is only one motor, on the right - there are already two of them. The first one works to its fullest, squeezing all the fingers around the ball. The second can work fingers selectively, due to the difference in the tension of the cable. The same principle applies with the capture of banknotes.
Given the presence of only two engines, SoftHand can apply an impressive set of maneuvers. She can pull out her index finger to tilt the valve, or move the sheet off the table. She can even unscrew the lid of the jar. And all this is relatively inexpensive. After all, the more motors, so it is more expensive.
“In order for robots to learn and do all kinds of cool things, we need low-cost, reliable, and complex systems,” says robotics Lerrel Pinto of Carnegie Mellon University, who develops manipulators for robots. “I think that this hand of theirs offers an excellent compromise,” he adds, but the real test will be finding a real use of such a hand. “Can I use it for offline learning?” How reliable is it, will it withstand thousands of grips? There are no answers to these questions. ”
SoftHand is a promising project, but more complex robotic manipulators, like the Shadow Dexterous Hand, still have something to offer. SoftHand can do a good job with stereotypical behavior, such as unscrewing the lids of cans, and Shadow with its many motors can better adapt to complex tasks.
And SoftHand will easily handle the greeting on the cams.