Overview of Stellaris LaunchPad
Finally, the long-ordered LaunchPad arrived, the first photos and a quick start - under the cut.
What kind of thing? A debug board from Texas Instruments with a Cortex-M4F processor.
Specifications:

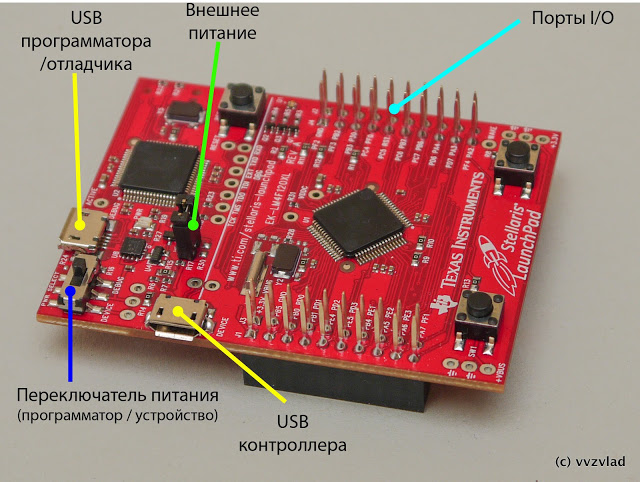
What's cool - on the board there are two completely identical LM4F120H5QR. One, with an already wired program, acts as a programmer and debugger, and the second is used for its intended purpose - the firmware is poured into it. So what we have. two clock buttons connected to the pins and one button to reset the controller. Many, many legs, two MicroUSB connectors connected to each of the two controllers (as I said, they are identical, and if you have a programmer, you can also flash the first controller too). In the left corner of thering
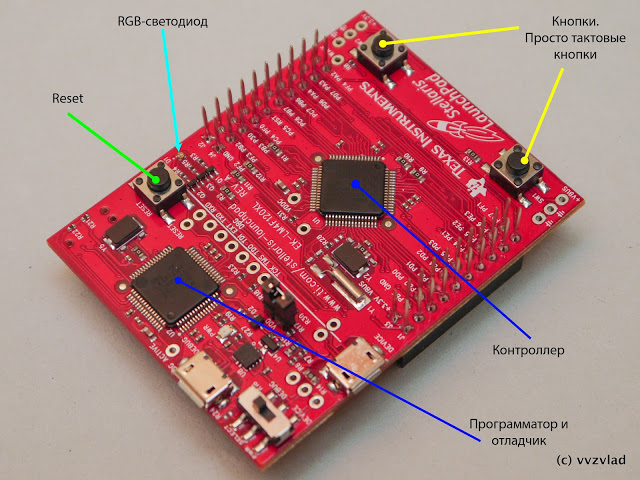
Between the reset button and one of the output columns there was a very small (but bright, contagious) three-color LED - probably 1x1mm in size.
Download the program.
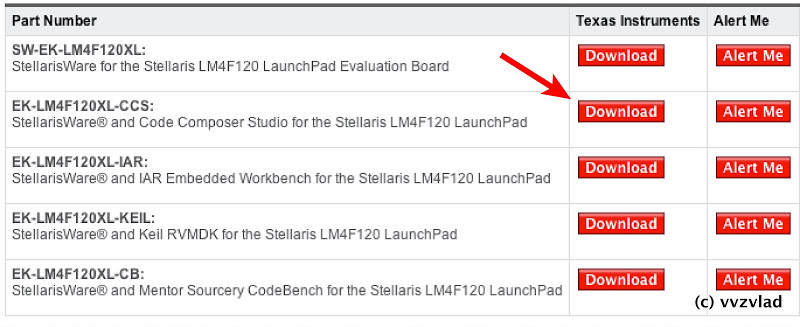
We go here and find a package called EK-LM4F120XL-CCS. This is Code Composer Studio and a toolkit for working with Stellaris. Click download. We agree with the agreement that we will not make a warhead out of this board, describe the device and the area of application (specifically, this download is not checked, you can write anything. In some top secret files, the information will be checked by a specially trained person). Unpack. From the Software \ CCS folder, put the studio, connect the board, and install the drivers from the Software \ ICDI folder. Launch SW-EK-LM4F120XL-9453 from the Software \ StellarisWare folder. It is unpacked by default to the root of the system drive, the StellarisWare folder. We go into the studio:

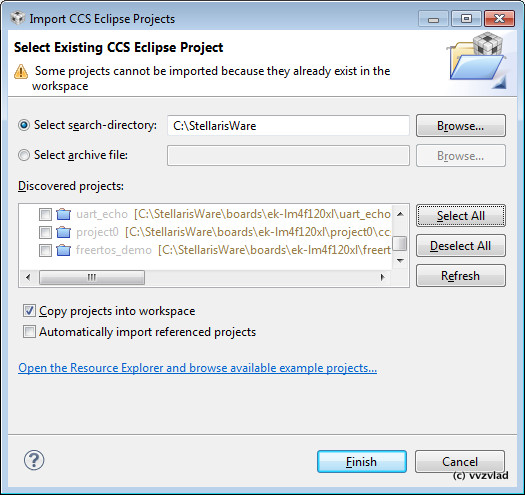
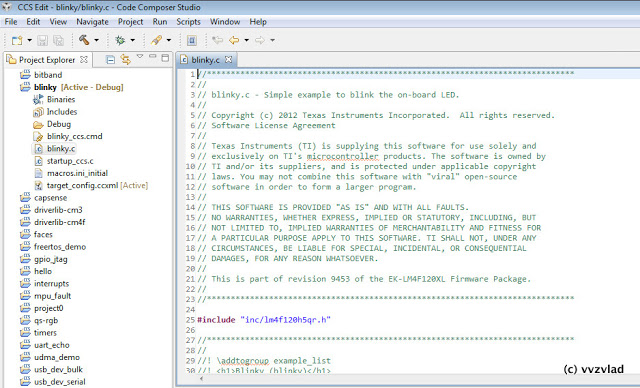
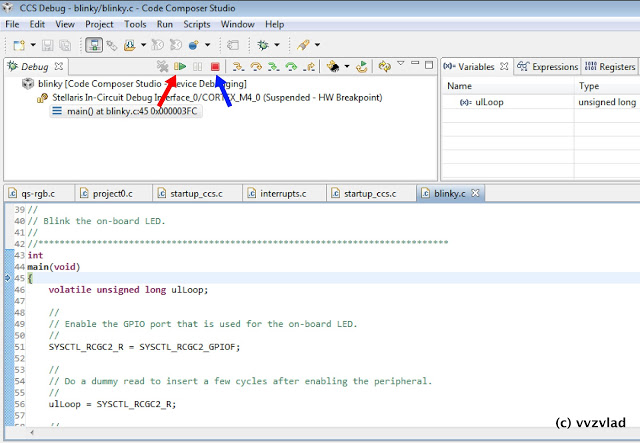
Project - Import Exiting CSS Eclipse Project, after which we poke our nose into the folder obtained in the previous step. Select All - Finish. After copying is complete, open View - Project Explorer, in which we see examples of programs: Right-click on any project you like, Debug As. The project will assemble, fill in the controller, and stand on the first instruction, and you will open the debug window. The red arrow - start execution, the blue arrow - close the debug window. Good debugging! :)
- Core frequency 80 MHz (performance 100 DMIPS)
- Memory: 256 KB flash, 32 KB SRAM, 2KB EEPROM
- 8 UART, 4 SPI, 1 CAN, 6 I²C, the most delicious is full USB (capable of both Device, Host and OTG)
- 3 analog comparators, two 12-bit ADCs, temperature sensor.
- 16 PWM, 2 inputs for encoders, 12 timers, real-time timer with clock quartz, 2 watt dogs.
- 43 pins I / O.
Pay
The package contains a board of the same size as the Launchpad MSP430, and a short USB-MicroUSB cable.What's cool - on the board there are two completely identical LM4F120H5QR. One, with an already wired program, acts as a programmer and debugger, and the second is used for its intended purpose - the firmware is poured into it. So what we have. two clock buttons connected to the pins and one button to reset the controller. Many, many legs, two MicroUSB connectors connected to each of the two controllers (as I said, they are identical, and if you have a programmer, you can also flash the first controller too). In the left corner of the
Between the reset button and one of the output columns there was a very small (but bright, contagious) three-color LED - probably 1x1mm in size.
Fast start
Download the program.
We go here and find a package called EK-LM4F120XL-CCS. This is Code Composer Studio and a toolkit for working with Stellaris. Click download. We agree with the agreement that we will not make a warhead out of this board, describe the device and the area of application (specifically, this download is not checked, you can write anything. In some top secret files, the information will be checked by a specially trained person). Unpack. From the Software \ CCS folder, put the studio, connect the board, and install the drivers from the Software \ ICDI folder. Launch SW-EK-LM4F120XL-9453 from the Software \ StellarisWare folder. It is unpacked by default to the root of the system drive, the StellarisWare folder. We go into the studio:
Project - Import Exiting CSS Eclipse Project, after which we poke our nose into the folder obtained in the previous step. Select All - Finish. After copying is complete, open View - Project Explorer, in which we see examples of programs: Right-click on any project you like, Debug As. The project will assemble, fill in the controller, and stand on the first instruction, and you will open the debug window. The red arrow - start execution, the blue arrow - close the debug window. Good debugging! :)