Connect joysticks from Dendy to PC via Arduino
- Tutorial
I think many of you remember those glorious times when we spent hours chopping up in tanks, ninja turtles, battles and doubledragons and a couple of dozen other super games on the Dandy. It was a great time! Most of the games were damn complex, but even so, failure after failure, we all the same went to our goal and started the game anew, so that today we could go through to the end.
Having comprehended my heart and soul, I decided that I really want to play Dendy and I want to play on the laptop, but not on the keyboard, but on the good old joystick.
Below I will describe what problems I encountered and how I solved them.
Let me explain a little why this is how I wanted to play. I still have the prefix and it works fine, but there are only a couple of cartridges left (I distributed the rest to my friends). And playing dandy games on the keyboard, well, it’s somehow not at all ice.
There was a problem how to connect the joystick from Dandy to a laptop.
A little googling, I realized that this is mainly solved by connecting via the LPT port and using ready-made drivers, but I have a laptop, and this does not suit me. Then I remembered that I had an Arduino Uno board and I decided that I would go my own way and use it.
The first problem turned out to be that the connectors on the joysticks are internal, and all the pinout descriptions found on the Internet were for external connectors.

I could not find the specification for my noname dandy, so I began to look at the internal board to find power and ground there, and to understand which of the five contacts on the joystick connect to them. I dealt with this quickly. It turned out to be two extreme contacts.
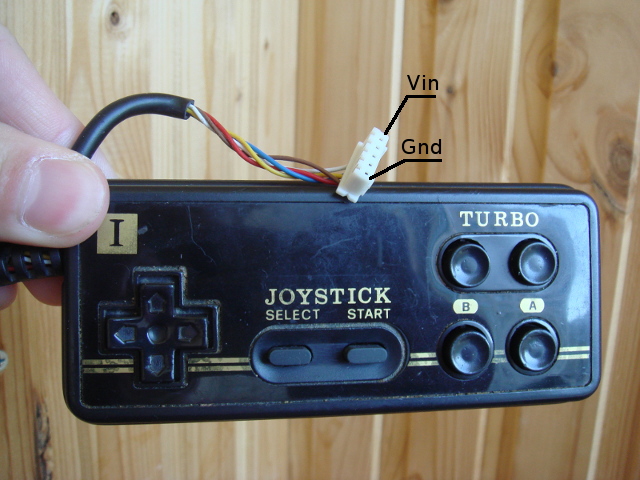
To Arduino, I connected everything directly, power - 5V power, earth - earth, the other three contacts connected to the 2, 3 and 4 digital pin.
It turned out to be not so easy to find this information. Only a few posts on a couple of forums. Personally, this entry helped me: code.google.com/p/avrtoys/wiki/joystick , namely this code: avrtoys.googlecode.com/svn/trunk/joystick/main.c . And here is the link to the note mentioned in this entry in the journal Radio: ftp.radio.ru/pub/arhiv/1996/06-96/46-6-1996.gif . From all this, I concluded that you need to send a signal to Latch, and then 8 times to send a signal to Clock and each time read the value from Data, which after each Clock will contain information about the next joystick button.
If everything is already set up for you or you are satisfied with the Arduino IDE, you can go to step 3.
I don’t know about you, but personally the official Arduino IDE terribly depresses me, so I’ll briefly tell you how to use your favorite IDE.
First of all, I downloaded the Arduino IDE sources and found there the code responsible for compiling and updating the firmware. Having spent a little time, I highlighted all the commands that are used there:
In the above command, when linking, the library libArduino.a is used, it can be obtained by compiling all * .c and * .cpp files from the folder with headers and collecting all the objects in one archive. Or you can just start the Arduino IDE, compile any project and copy the file /tmp/build*.tmp/core.a. It will be absolutely equivalent.
All these commands are relevant for Arduino Uno, for other arduin some parameters should be changed.
Now using these commands, you can easily configure your IDE to automatically compile and download firmware.
Here it was only necessary to determine which of the 2, 3 and 4 pins are responsible for Latch, Clock and Data. I decided this by trial and error. We assume that 4 is Data, and do Serial.println (digitalRead (4)), if there is any reaction when the buttons are pressed, then this is it. The remaining 2 contacts were determined when the firmware was already written, if everything works, then guessed right, no - we swap them.
The code, again, was written based on avrtoys.googlecode.com/svn/trunk/joystick/main.c :
As a result, I received 1 byte containing information about all 8 buttons of the joystick, each in the corresponding bit. I got the following location: A, B, Select, Start, Up, Down, Left, Right. After this byte is sent to the computer, where it is received and processed by my “driver”.
It is easy to see that you can easily connect a second joystick.
Here it was necessary to take this very byte from Arduino and emulate the keystrokes of the keyboard. Yes, clicks on the joystick will be processed like clicks on the keyboard, for better or worse.
I chose Python as the programming language. Simple and effective, I think it was a great fit for this task.
The only problem that arose here is the bounce of the joystick contacts . I solved it by introducing a time interval that occurs after changing the state of the button, during which the state does not change. Enough 0.05 s.
To emulate keystrokes, I used the xte utility that came with the Xautomation bundle. It is very easy to use, here is an example:
To exit the driver, I used the state when the entire cross was pressed. The number 0xf0 corresponds to this state.
All! It remains only to configure the dandy emulator, I chose FCEUX.
We indicate in the settings those keys that are specified in the driver and recall childhood!
In fact, there are other, possibly more effective ways to use Arduino in this situation. For example, if you have an Arduino Leonardo, you can use the Keyboard object to directly send keyboard commands to your computer. It is also possible, as I understand it, to reflash Arduino so that it displays like a joystick / keyboard / mouse and also send commands directly. Here is the tutorial: http://mitchtech.net/arduino-usb-hid-keyboard/ . However, my method completely suits me and I am more than satisfied with the result.
Like it or not, Arduino is a great platform for such experiments.
Now it remains only to collect all this in the form of a separate device.
Well, the final video:
Having comprehended my heart and soul, I decided that I really want to play Dendy and I want to play on the laptop, but not on the keyboard, but on the good old joystick.
Below I will describe what problems I encountered and how I solved them.
Let me explain a little why this is how I wanted to play. I still have the prefix and it works fine, but there are only a couple of cartridges left (I distributed the rest to my friends). And playing dandy games on the keyboard, well, it’s somehow not at all ice.
There was a problem how to connect the joystick from Dandy to a laptop.
A little googling, I realized that this is mainly solved by connecting via the LPT port and using ready-made drivers, but I have a laptop, and this does not suit me. Then I remembered that I had an Arduino Uno board and I decided that I would go my own way and use it.
0. Definition of pinout on the joystick
The first problem turned out to be that the connectors on the joysticks are internal, and all the pinout descriptions found on the Internet were for external connectors.
I could not find the specification for my noname dandy, so I began to look at the internal board to find power and ground there, and to understand which of the five contacts on the joystick connect to them. I dealt with this quickly. It turned out to be two extreme contacts.
To Arduino, I connected everything directly, power - 5V power, earth - earth, the other three contacts connected to the 2, 3 and 4 digital pin.
1. Description of the joystick protocol
It turned out to be not so easy to find this information. Only a few posts on a couple of forums. Personally, this entry helped me: code.google.com/p/avrtoys/wiki/joystick , namely this code: avrtoys.googlecode.com/svn/trunk/joystick/main.c . And here is the link to the note mentioned in this entry in the journal Radio: ftp.radio.ru/pub/arhiv/1996/06-96/46-6-1996.gif . From all this, I concluded that you need to send a signal to Latch, and then 8 times to send a signal to Clock and each time read the value from Data, which after each Clock will contain information about the next joystick button.
{kind=link}
2. Setting up the environment
If everything is already set up for you or you are satisfied with the Arduino IDE, you can go to step 3.
I don’t know about you, but personally the official Arduino IDE terribly depresses me, so I’ll briefly tell you how to use your favorite IDE.
First of all, I downloaded the Arduino IDE sources and found there the code responsible for compiling and updating the firmware. Having spent a little time, I highlighted all the commands that are used there:
#!/bin/bash
avr-gcc -c -g -Os -fno-exceptions -ffunction-sections -fdata-sections -mmcu=atmega328p -DF_CPU=16000000UL -I /usr/share/arduino/hardware/arduino/cores/arduino -I /usr/share/arduino/hardware/arduino/variants/standard $filename.cpp -o $filename.o
avr-gcc -Os -Wl,--gc-sections -mmcu=atmega328p -o $filename.elf $filename.o libArduino.a -lm
avr-objcopy -O ihex -R .eeprom $filename.elf $filename.elf.hex
avrdude -V -p m328p -b 115200 -c arduino -P /dev/ttyACM0 -U flash:w:$filename.elf.hex
In the above command, when linking, the library libArduino.a is used, it can be obtained by compiling all * .c and * .cpp files from the folder with headers and collecting all the objects in one archive. Or you can just start the Arduino IDE, compile any project and copy the file /tmp/build*.tmp/core.a. It will be absolutely equivalent.
All these commands are relevant for Arduino Uno, for other arduin some parameters should be changed.
Now using these commands, you can easily configure your IDE to automatically compile and download firmware.
3. Writing the firmware code
Here it was only necessary to determine which of the 2, 3 and 4 pins are responsible for Latch, Clock and Data. I decided this by trial and error. We assume that 4 is Data, and do Serial.println (digitalRead (4)), if there is any reaction when the buttons are pressed, then this is it. The remaining 2 contacts were determined when the firmware was already written, if everything works, then guessed right, no - we swap them.
The code, again, was written based on avrtoys.googlecode.com/svn/trunk/joystick/main.c :
Firmware code
#include
const int data = 2;
const int latch = 3;
const int clock = 4;
const int TICK = 2;
void init_joystick(int data, int latch, int clock)
{
pinMode(data, INPUT);
pinMode(clock, OUTPUT);
pinMode(latch, OUTPUT);
digitalWrite(clock, HIGH);
}
int get_keys_state_joystick(int data, int latch, int clock)
{
digitalWrite(latch, HIGH);
delayMicroseconds(TICK);
digitalWrite(latch, LOW);
int keys_state = 0;
for (int i = 0; i < 8; ++i) {
delayMicroseconds(TICK);
digitalWrite(clock, LOW);
keys_state <<= 1;
keys_state += digitalRead(data);
delayMicroseconds(TICK);
digitalWrite(clock, HIGH);
}
return keys_state;
}
void setup()
{
init_joystick(data, latch, clock);
Serial.begin(57600);
}
void loop()
{
Serial.write(get_keys_state_joystick(data, latch, clock));
}
As a result, I received 1 byte containing information about all 8 buttons of the joystick, each in the corresponding bit. I got the following location: A, B, Select, Start, Up, Down, Left, Right. After this byte is sent to the computer, where it is received and processed by my “driver”.
It is easy to see that you can easily connect a second joystick.
4. Writing a “driver”
Here it was necessary to take this very byte from Arduino and emulate the keystrokes of the keyboard. Yes, clicks on the joystick will be processed like clicks on the keyboard, for better or worse.
I chose Python as the programming language. Simple and effective, I think it was a great fit for this task.
The only problem that arose here is the bounce of the joystick contacts . I solved it by introducing a time interval that occurs after changing the state of the button, during which the state does not change. Enough 0.05 s.
To emulate keystrokes, I used the xte utility that came with the Xautomation bundle. It is very easy to use, here is an example:
xte 'keydown Left'. See man xte for more information.To exit the driver, I used the state when the entire cross was pressed. The number 0xf0 corresponds to this state.
Driver code
#!/usr/bin/python
import serial
import os
import time
def bool_to_updown(val):
if val:
return 'up'
else:
return 'down'
exit_keys = 0xf0
delta_time = 0.05
keys = [['Right', False, 0.0],
['Left', False, 0.0],
['Down', False, 0.0],
['Up', False, 0.0],
['s', False, 0.0], # START
['a', False, 0.0], # SELECT
['x', False, 0.0], # B
['z', False, 0.0]] # A
ser = serial.Serial('/dev/ttyACM0', 57600)
keys_state = 0
while keys_state != exit_keys:
keys_state = ord(ser.read())
for i in range(8):
if not bool(keys_state & (1 << i)) != keys[i][1] and time.time() - keys[i][2] > delta_time:
os.system("xte 'key{0} {1}'".format(bool_to_updown(keys[i][1]), keys[i][0]))
keys[i][1] = not keys[i][1]
keys[i][2] = time.time()
for i in range(8):
os.system("xte 'keyup {0}'".format(keys[i][0]))
ser.close()
print('Goodbye!')
5. Hurray! Play!
All! It remains only to configure the dandy emulator, I chose FCEUX.
We indicate in the settings those keys that are specified in the driver and recall childhood!
Conclusion
In fact, there are other, possibly more effective ways to use Arduino in this situation. For example, if you have an Arduino Leonardo, you can use the Keyboard object to directly send keyboard commands to your computer. It is also possible, as I understand it, to reflash Arduino so that it displays like a joystick / keyboard / mouse and also send commands directly. Here is the tutorial: http://mitchtech.net/arduino-usb-hid-keyboard/ . However, my method completely suits me and I am more than satisfied with the result.
Like it or not, Arduino is a great platform for such experiments.
Now it remains only to collect all this in the form of a separate device.
Well, the final video: