Simon A-20. We live with Arduino not dumb
Good day,% username%.
I saw a lot of beasts on the arduino platform: segway, three-wheeled, four-axle (quadrocopters) etc, and I wanted my own.
I wanted to do it!
Under cat specifications, photos and creation history

At first the board was made, it took about two months to do it because of a long search for parts and waiting for the atmega (which was later burned, and I was waiting for another one).
Then a motor shield was purchased in ampere, I was too lazy to repeat the assembly process of arduino.
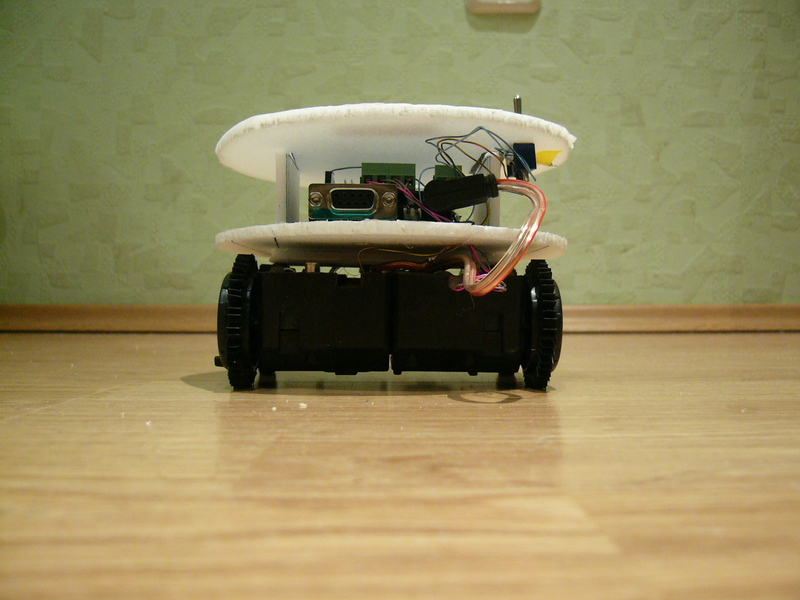
After the chassis was assembled, I launched two Chinese cars and a sheet of ceiling tile (50x50) onto it.

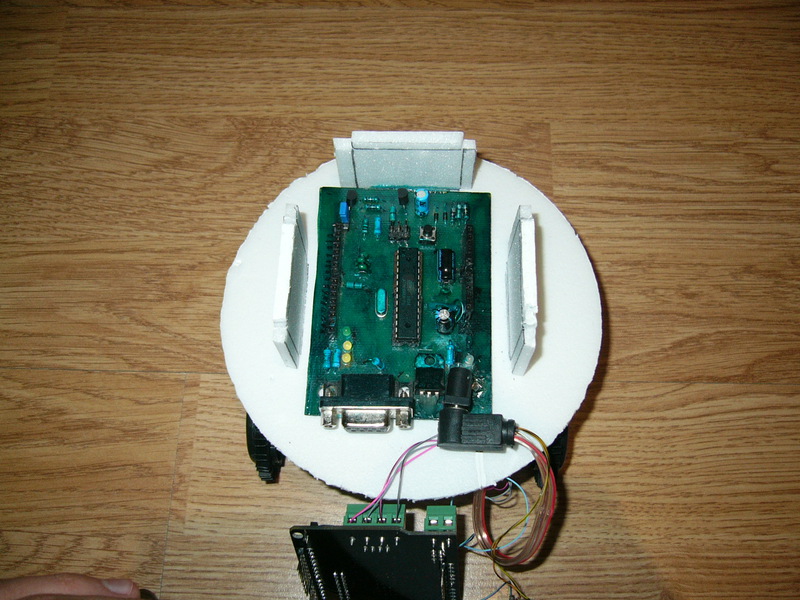
Three “pancakes” and three racks were cut from the ceiling, the first lay on the chassis, the boards are placed on it, the second pancake lies on the racks, it has a power toggle switch, an LED and the name of the robot.

Soon I will finish two light sensors, and the robot will begin to fulfill its primary idea - to drive along the line. A video camera will also fall on board, which will transmit video to the campus (I do not plan to process the video with a robot) and a manipulator of two servomotors and the same ceiling.

I saw a lot of beasts on the arduino platform: segway, three-wheeled, four-axle (quadrocopters) etc, and I wanted my own.
I wanted to do it!
Simon a-20
Under cat specifications, photos and creation history
On board:
- Arduino Severino (homemade)
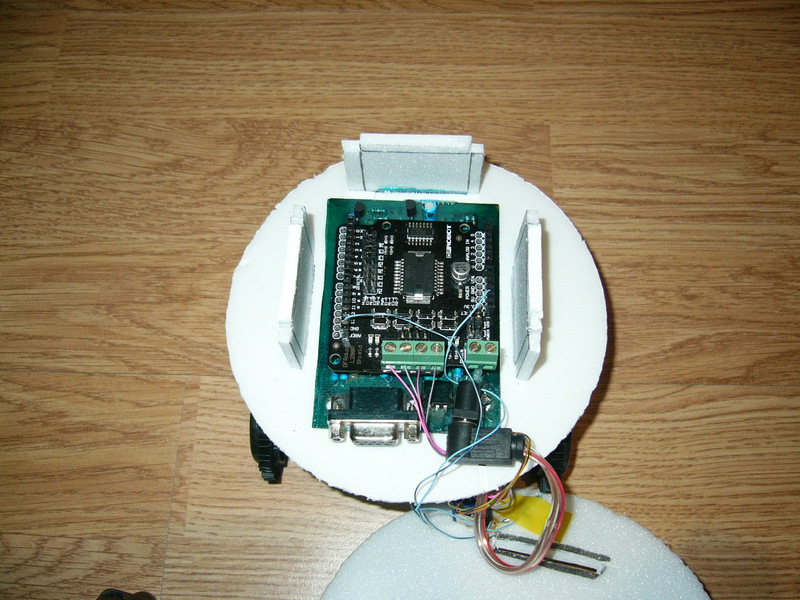
- Motor shield
- Chinese battery 6v 500mAh
Chassis:
- Two phenolic cars
- Ceiling tile frame
A chicken or an egg?
At first the board was made, it took about two months to do it because of a long search for parts and waiting for the atmega (which was later burned, and I was waiting for another one).
Then a motor shield was purchased in ampere, I was too lazy to repeat the assembly process of arduino.
After the chassis was assembled, I launched two Chinese cars and a sheet of ceiling tile (50x50) onto it.
Three “pancakes” and three racks were cut from the ceiling, the first lay on the chassis, the boards are placed on it, the second pancake lies on the racks, it has a power toggle switch, an LED and the name of the robot.
Simon B-60. Future
Soon I will finish two light sensors, and the robot will begin to fulfill its primary idea - to drive along the line. A video camera will also fall on board, which will transmit video to the campus (I do not plan to process the video with a robot) and a manipulator of two servomotors and the same ceiling.