How AI learns to generate cat images
- Transfer

How AI translation can learn to generate pictures of cats . Generative Adversarial Nets (GAN)
research published in 2014 was a breakthrough in the field of generative models. Lead researcher Yann Lekun called adversarial nets "the best idea in machine learning over the past twenty years." Today, thanks to this architecture, we can create an AI that generates realistic images of cats. Cool! DCGAN during training All the working code is in the Github repository . It will be useful to you if you have any experience in Python programming, deep learning, working with Tensorflow and convolutional neural networks.
And if you are new to deep learning, I recommend that you familiarize yourself with the excellent series of articles Machine Learning is Fun!
What is DCGAN?
Deep Convolutional Generative Adverserial Networks (DCGAN) is a deep learning architecture that generates data similar to the data from the training set.
This model replaces with convolutional layers the fully connected layers of the generative adversarial network. To understand how DCGAN works, we use the metaphor of confrontation between an expert art critic and a falsifier.
The falsifier (“generator”) is trying to create a fake Van Gogh picture and pass it off as a real one.
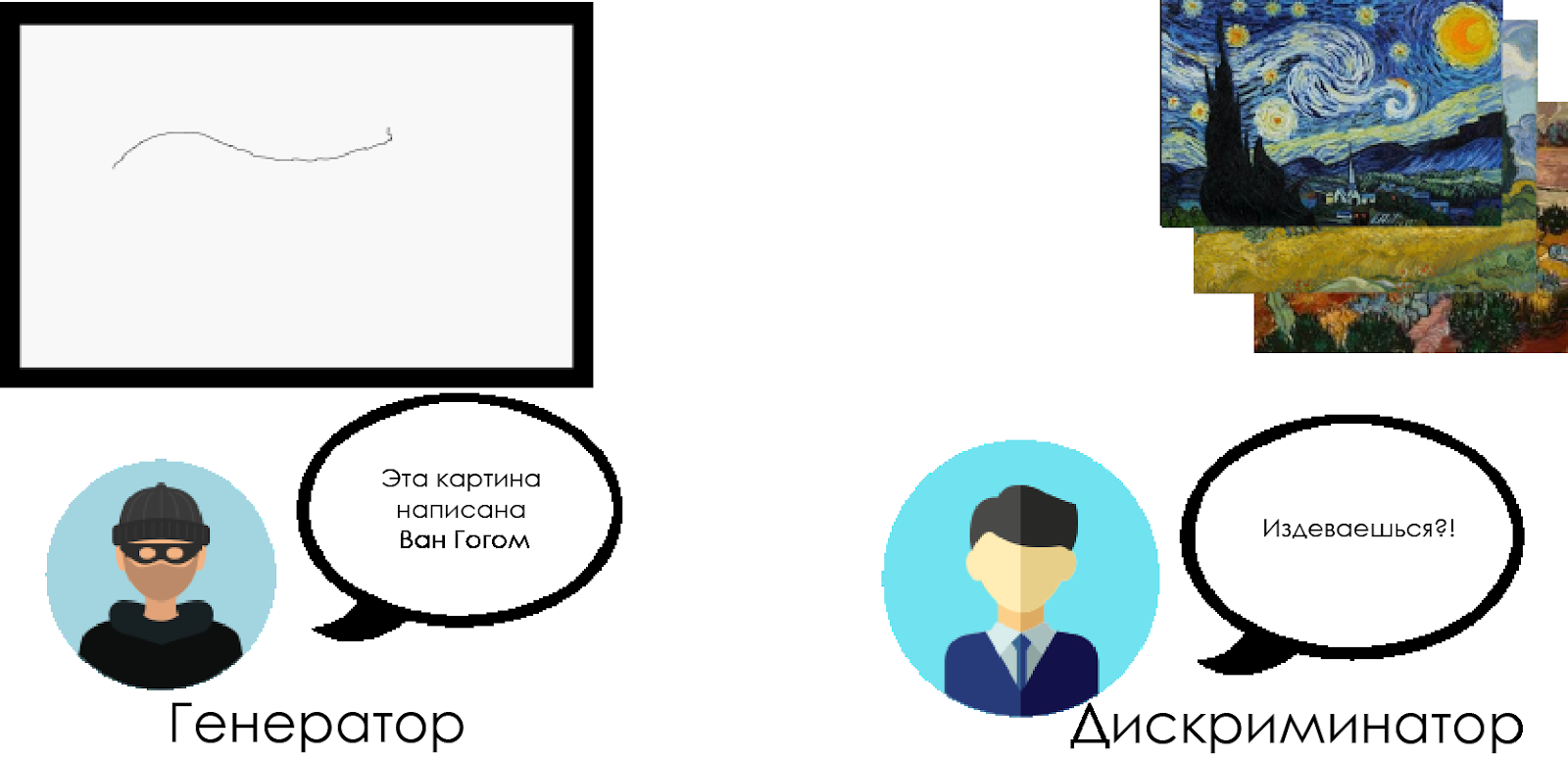
An art critic (“discriminator”) is trying to convict a falsifier, using his knowledge of the real canvases of Van Gogh.
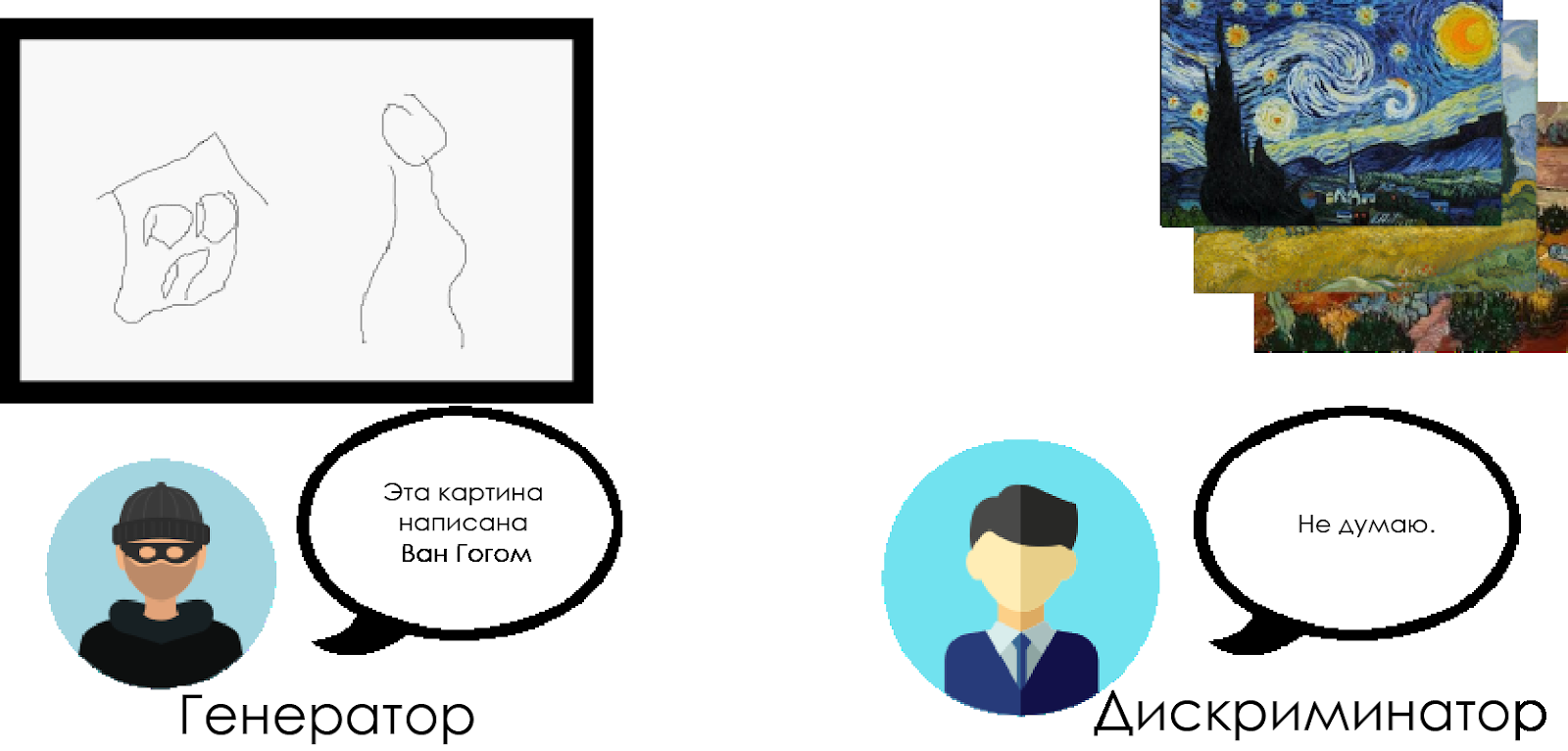
Over time, the art critic is increasingly defining fakes, and the falsifier makes them all more perfect.

As you can see, DCGANs are composed of two separate deep learning neural networks competing with each other.
- The generator is trying to create believable data. He does not know what the real data is, but he learns from the responses of the enemy neural network, changing the results of his work with each iteration.
- The discriminator tries to determine the fake data (comparing with the real ones), avoiding false positives as far as possible in relation to the real data. The result of this model is feedback for the generator.
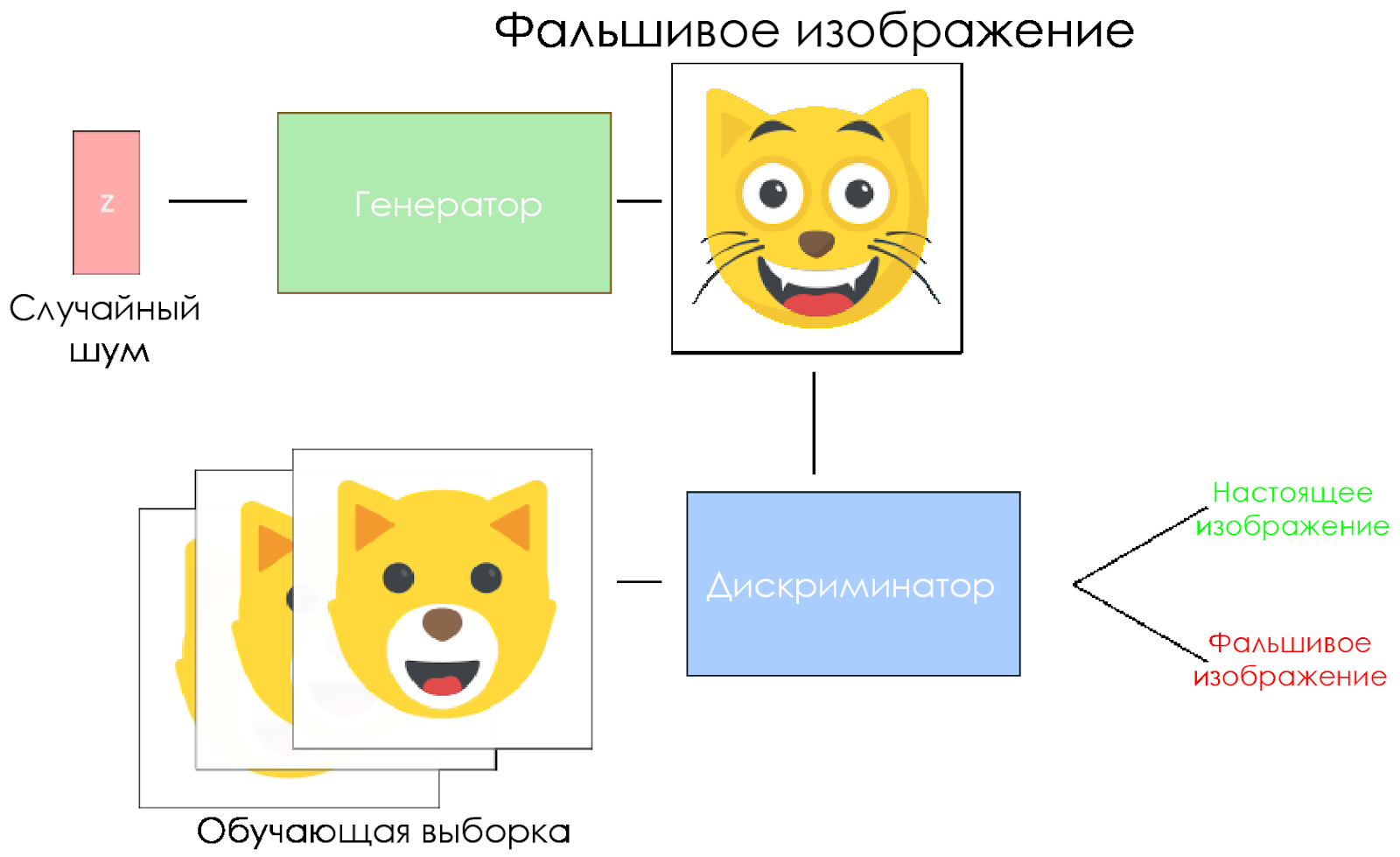
DCGAN schema.
- The generator takes a random noise vector and generates an image.
- The image is given to the discriminator, he compares it with the training sample.
- The discriminator returns a number - 0 (fake) or 1 (real image).
Let's create a DCGAN!
Now we are ready to create our own AI.
In this part, we will focus on the main components of our model. If you want to see the whole code, go here .
Input data
Create stubs for the input data:
inputs_realfor the discriminator and inputs_zfor the generator. Please note that we will have two learning rates, separately for the generator and discriminator. DCGANs are very sensitive to hyperparameters, so it is very important to fine-tune them.
def model_inputs(real_dim, z_dim):"""
Create the model inputs
:param real_dim: tuple containing width, height and channels
:param z_dim: The dimension of Z
:return: Tuple of (tensor of real input images, tensor of z data, learning rate G, learning rate D)
"""
# inputs_real for Discriminator
inputs_real = tf.placeholder(tf.float32, (None, *real_dim), name='inputs_real')
# inputs_z for Generator
inputs_z = tf.placeholder(tf.float32, (None, z_dim), name="input_z")
# Two different learning rate : one for the generator, one for the discriminator
learning_rate_G = tf.placeholder(tf.float32, name="learning_rate_G")
learning_rate_D = tf.placeholder(tf.float32, name="learning_rate_D")
return inputs_real, inputs_z, learning_rate_G, learning_rate_DDiscriminator and generator
We use
tf.variable_scopefor two reasons. First, to make sure all variable names start with generator / discriminator. Later this will help us in training two neural networks.
Secondly, we will reuse these networks with different input data:
- We will train the generator, and then take a sample of the images generated by it.
- In the discriminator, we will share variables for fake and real input images.
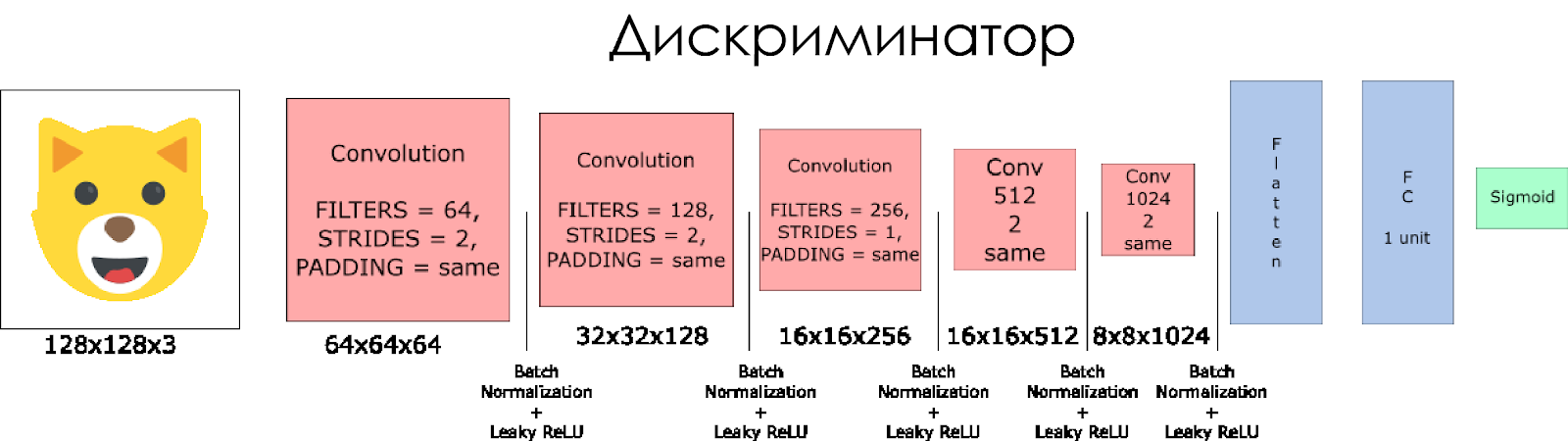
Let's create a discriminator. Remember that as input, it takes a real or false image and returns 0 or 1. In response, a
few notes:
- We need to double the filter size in each convolutional layer.
- Using downsampling is not recommended. Instead, only stripped convolutional layers are applicable.
- In each layer, we use batch normalization (with the exception of the input layer), since this reduces the covariance shift. Read more in this wonderful article .
- We will use Leaky ReLU as an activation function, this will help to avoid the effect of “disappearing” gradient.
def discriminator(x, is_reuse=False, alpha = 0.2):
''' Build the discriminator network.
Arguments
---------
x : Input tensor for the discriminator
n_units: Number of units in hidden layer
reuse : Reuse the variables with tf.variable_scope
alpha : leak parameter for leaky ReLU
Returns
-------
out, logits:
'''
with tf.variable_scope("discriminator", reuse = is_reuse):
# Input layer 128*128*3 --> 64x64x64
# Conv --> BatchNorm --> LeakyReLU
conv1 = tf.layers.conv2d(inputs = x,
filters = 64,
kernel_size = [5,5],
strides = [2,2],
padding = "SAME",
kernel_initializer=tf.truncated_normal_initializer(stddev=0.02),
name='conv1')
batch_norm1 = tf.layers.batch_normalization(conv1,
training = True,
epsilon = 1e-5,
name = 'batch_norm1')
conv1_out = tf.nn.leaky_relu(batch_norm1, alpha=alpha, name="conv1_out")
# 64x64x64--> 32x32x128
# Conv --> BatchNorm --> LeakyReLU
conv2 = tf.layers.conv2d(inputs = conv1_out,
filters = 128,
kernel_size = [5, 5],
strides = [2, 2],
padding = "SAME",
kernel_initializer=tf.truncated_normal_initializer(stddev=0.02),
name='conv2')
batch_norm2 = tf.layers.batch_normalization(conv2,
training = True,
epsilon = 1e-5,
name = 'batch_norm2')
conv2_out = tf.nn.leaky_relu(batch_norm2, alpha=alpha, name="conv2_out")
# 32x32x128 --> 16x16x256
# Conv --> BatchNorm --> LeakyReLU
conv3 = tf.layers.conv2d(inputs = conv2_out,
filters = 256,
kernel_size = [5, 5],
strides = [2, 2],
padding = "SAME",
kernel_initializer=tf.truncated_normal_initializer(stddev=0.02),
name='conv3')
batch_norm3 = tf.layers.batch_normalization(conv3,
training = True,
epsilon = 1e-5,
name = 'batch_norm3')
conv3_out = tf.nn.leaky_relu(batch_norm3, alpha=alpha, name="conv3_out")
# 16x16x256 --> 16x16x512
# Conv --> BatchNorm --> LeakyReLU
conv4 = tf.layers.conv2d(inputs = conv3_out,
filters = 512,
kernel_size = [5, 5],
strides = [1, 1],
padding = "SAME",
kernel_initializer=tf.truncated_normal_initializer(stddev=0.02),
name='conv4')
batch_norm4 = tf.layers.batch_normalization(conv4,
training = True,
epsilon = 1e-5,
name = 'batch_norm4')
conv4_out = tf.nn.leaky_relu(batch_norm4, alpha=alpha, name="conv4_out")
# 16x16x512 --> 8x8x1024
# Conv --> BatchNorm --> LeakyReLU
conv5 = tf.layers.conv2d(inputs = conv4_out,
filters = 1024,
kernel_size = [5, 5],
strides = [2, 2],
padding = "SAME",
kernel_initializer=tf.truncated_normal_initializer(stddev=0.02),
name='conv5')
batch_norm5 = tf.layers.batch_normalization(conv5,
training = True,
epsilon = 1e-5,
name = 'batch_norm5')
conv5_out = tf.nn.leaky_relu(batch_norm5, alpha=alpha, name="conv5_out")
# Flatten it
flatten = tf.reshape(conv5_out, (-1, 8*8*1024))
# Logits
logits = tf.layers.dense(inputs = flatten,
units = 1,
activation = None)
out = tf.sigmoid(logits)
return out, logits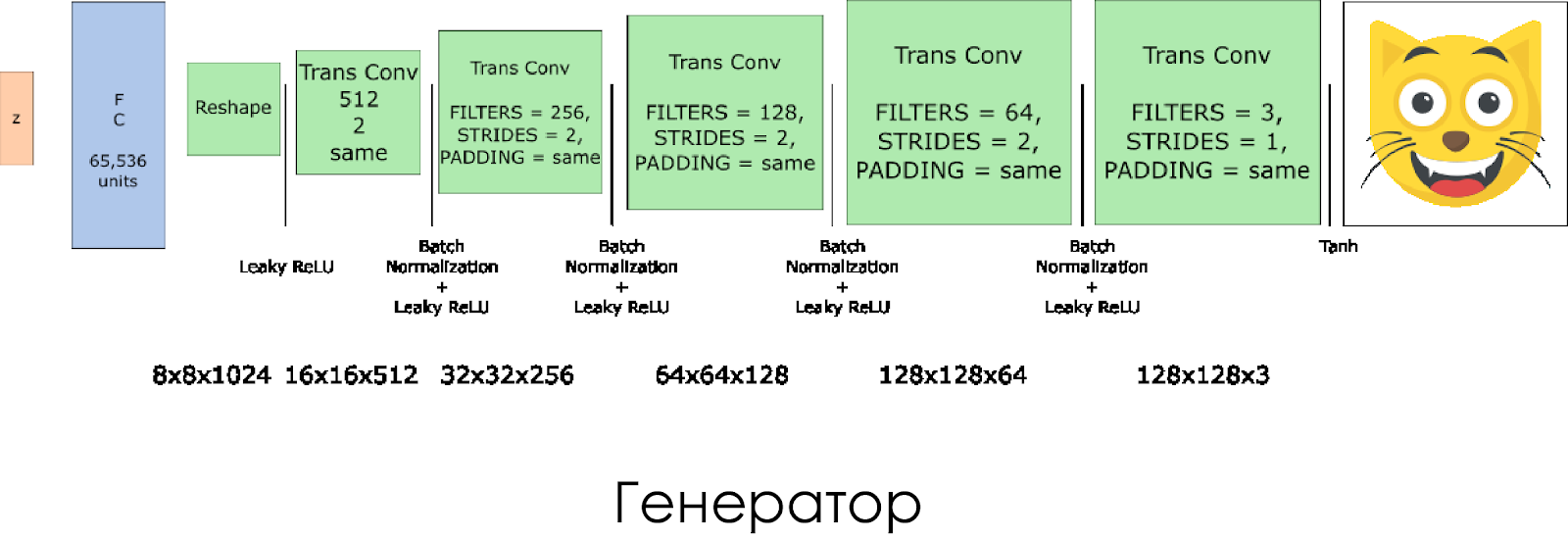
We have created a generator. Remember that it takes the noise vector (z) as input and, thanks to the transposed convolution layers, creates a fake image.
On each layer, we halve the size of the filter, and also double the size of the image.
A generator works best when used
tanhas an output activation function.def generator(z, output_channel_dim, is_train=True):
''' Build the generator network.
Arguments
---------
z : Input tensor for the generator
output_channel_dim : Shape of the generator output
n_units : Number of units in hidden layer
reuse : Reuse the variables with tf.variable_scope
alpha : leak parameter for leaky ReLU
Returns
-------
out:
'''
with tf.variable_scope("generator", reuse= not is_train):
# First FC layer --> 8x8x1024
fc1 = tf.layers.dense(z, 8*8*1024)
# Reshape it
fc1 = tf.reshape(fc1, (-1, 8, 8, 1024))
# Leaky ReLU
fc1 = tf.nn.leaky_relu(fc1, alpha=alpha)
# Transposed conv 1 --> BatchNorm --> LeakyReLU
# 8x8x1024 --> 16x16x512
trans_conv1 = tf.layers.conv2d_transpose(inputs = fc1,
filters = 512,
kernel_size = [5,5],
strides = [2,2],
padding = "SAME",
kernel_initializer=tf.truncated_normal_initializer(stddev=0.02),
name="trans_conv1")
batch_trans_conv1 = tf.layers.batch_normalization(inputs = trans_conv1, training=is_train, epsilon=1e-5, name="batch_trans_conv1")
trans_conv1_out = tf.nn.leaky_relu(batch_trans_conv1, alpha=alpha, name="trans_conv1_out")
# Transposed conv 2 --> BatchNorm --> LeakyReLU
# 16x16x512 --> 32x32x256
trans_conv2 = tf.layers.conv2d_transpose(inputs = trans_conv1_out,
filters = 256,
kernel_size = [5,5],
strides = [2,2],
padding = "SAME",
kernel_initializer=tf.truncated_normal_initializer(stddev=0.02),
name="trans_conv2")
batch_trans_conv2 = tf.layers.batch_normalization(inputs = trans_conv2, training=is_train, epsilon=1e-5, name="batch_trans_conv2")
trans_conv2_out = tf.nn.leaky_relu(batch_trans_conv2, alpha=alpha, name="trans_conv2_out")
# Transposed conv 3 --> BatchNorm --> LeakyReLU
# 32x32x256 --> 64x64x128
trans_conv3 = tf.layers.conv2d_transpose(inputs = trans_conv2_out,
filters = 128,
kernel_size = [5,5],
strides = [2,2],
padding = "SAME",
kernel_initializer=tf.truncated_normal_initializer(stddev=0.02),
name="trans_conv3")
batch_trans_conv3 = tf.layers.batch_normalization(inputs = trans_conv3, training=is_train, epsilon=1e-5, name="batch_trans_conv3")
trans_conv3_out = tf.nn.leaky_relu(batch_trans_conv3, alpha=alpha, name="trans_conv3_out")
# Transposed conv 4 --> BatchNorm --> LeakyReLU
# 64x64x128 --> 128x128x64
trans_conv4 = tf.layers.conv2d_transpose(inputs = trans_conv3_out,
filters = 64,
kernel_size = [5,5],
strides = [2,2],
padding = "SAME",
kernel_initializer=tf.truncated_normal_initializer(stddev=0.02),
name="trans_conv4")
batch_trans_conv4 = tf.layers.batch_normalization(inputs = trans_conv4, training=is_train, epsilon=1e-5, name="batch_trans_conv4")
trans_conv4_out = tf.nn.leaky_relu(batch_trans_conv4, alpha=alpha, name="trans_conv4_out")
# Transposed conv 5 --> tanh
# 128x128x64 --> 128x128x3
logits = tf.layers.conv2d_transpose(inputs = trans_conv4_out,
filters = 3,
kernel_size = [5,5],
strides = [1,1],
padding = "SAME",
kernel_initializer=tf.truncated_normal_initializer(stddev=0.02),
name="logits")
out = tf.tanh(logits, name="out")
return outLosses in the discriminator and generator
Since we train both the generator and the discriminator, we need to calculate the losses for both neural networks. The discriminator should give 1 when it “considers” the image to be real, and 0 if the image is fake. In accordance with this and you need to configure the loss. The loss of the discriminator is calculated as the sum of the losses for the real and false image:
d_loss = d_loss_real + d_loss_fake where
d_loss_realis the loss when the discriminator considers the image to be false, but in fact it is real. It is calculated as follows:- We use
d_logits_real, all labels are equal to 1 (because all data is real). labels = tf.ones_like(tensor) * (1 - smooth). Let's use label smoothing: lower the label values from 1.0 to 0.9 to help the discriminator generalize better.
d_loss_fake - This is a loss when the discriminator considers the image to be real, but in fact it is fake.- We use
d_logits_fake, all labels are equal to 0.
For loss, the generator is used
d_logits_fakefrom the discriminator. This time, all the labels are 1, because the generator wants to trick the discriminator.def model_loss(input_real, input_z, output_channel_dim, alpha):
"""
Get the loss for the discriminator and generator
:param input_real: Images from the real dataset
:param input_z: Z input
:param out_channel_dim: The number of channels in the output image
:return: A tuple of (discriminator loss, generator loss)
"""
# Generator network here
g_model = generator(input_z, output_channel_dim)
# g_model is the generator output
# Discriminator network here
d_model_real, d_logits_real = discriminator(input_real, alpha=alpha)
d_model_fake, d_logits_fake = discriminator(g_model,is_reuse=True, alpha=alpha)
# Calculate losses
d_loss_real = tf.reduce_mean(
tf.nn.sigmoid_cross_entropy_with_logits(logits=d_logits_real,
labels=tf.ones_like(d_model_real)))
d_loss_fake = tf.reduce_mean(
tf.nn.sigmoid_cross_entropy_with_logits(logits=d_logits_fake,
labels=tf.zeros_like(d_model_fake)))
d_loss = d_loss_real + d_loss_fake
g_loss = tf.reduce_mean(
tf.nn.sigmoid_cross_entropy_with_logits(logits=d_logits_fake,
labels=tf.ones_like(d_model_fake)))
return d_loss, g_lossOptimizers
After calculating the losses, the generator and discriminator must be individually updated. To do this, use the
tf.trainable_variables()create a list of all the variables defined in our graph.def model_optimizers(d_loss, g_loss, lr_D, lr_G, beta1):
"""
Get optimization operations
:param d_loss: Discriminator loss Tensor
:param g_loss: Generator loss Tensor
:param learning_rate: Learning Rate Placeholder
:param beta1: The exponential decay rate for the 1st moment in the optimizer
:return: A tuple of (discriminator training operation, generator training operation)
"""
# Get the trainable_variables, split into G and D parts
t_vars = tf.trainable_variables()
g_vars = [var for var in t_vars if var.name.startswith("generator")]
d_vars = [var for var in t_vars if var.name.startswith("discriminator")]
update_ops = tf.get_collection(tf.GraphKeys.UPDATE_OPS)
# Generator update
gen_updates = [op for op in update_ops if op.name.startswith('generator')]
# Optimizers
with tf.control_dependencies(gen_updates):
d_train_opt = tf.train.AdamOptimizer(learning_rate=lr_D, beta1=beta1).minimize(d_loss, var_list=d_vars)
g_train_opt = tf.train.AdamOptimizer(learning_rate=lr_G, beta1=beta1).minimize(g_loss, var_list=g_vars)
return d_train_opt, g_train_optTraining
Now we implement the training function. The idea is pretty simple:
- We save our model every five periods (epoch).
- We save the picture in the folder with images every 10 trained batches.
- Every 15 periods, we display
g_loss,d_lossand the generated image. This is because Jupyter notebook may crash when displaying too many pictures. - Or we can directly generate real images by loading a saved model (this will save 20 hours of training).
def train(epoch_count, batch_size, z_dim, learning_rate_D, learning_rate_G, beta1, get_batches, data_shape, data_image_mode, alpha):
"""
Train the GAN
:param epoch_count: Number of epochs
:param batch_size: Batch Size
:param z_dim: Z dimension
:param learning_rate: Learning Rate
:param beta1: The exponential decay rate for the 1st moment in the optimizer
:param get_batches: Function to get batches
:param data_shape: Shape of the data
:param data_image_mode: The image mode to use for images ("RGB" or "L")
"""
# Create our input placeholders
input_images, input_z, lr_G, lr_D = model_inputs(data_shape[1:], z_dim)
# Losses
d_loss, g_loss = model_loss(input_images, input_z, data_shape[3], alpha)
# Optimizers
d_opt, g_opt = model_optimizers(d_loss, g_loss, lr_D, lr_G, beta1)
i = 0
version = "firstTrain"
with tf.Session() as sess:
sess.run(tf.global_variables_initializer())
# Saver
saver = tf.train.Saver()
num_epoch = 0
if from_checkpoint == True:
saver.restore(sess, "./models/model.ckpt")
show_generator_output(sess, 4, input_z, data_shape[3], data_image_mode, image_path, True, False)
else:
for epoch_i in range(epoch_count):
num_epoch += 1
if num_epoch % 5 == 0:
# Save model every 5 epochs
#if not os.path.exists("models/" + version):
# os.makedirs("models/" + version)
save_path = saver.save(sess, "./models/model.ckpt")
print("Model saved")
for batch_images in get_batches(batch_size):
# Random noise
batch_z = np.random.uniform(-1, 1, size=(batch_size, z_dim))
i += 1
# Run optimizers
_ = sess.run(d_opt, feed_dict={input_images: batch_images, input_z: batch_z, lr_D: learning_rate_D})
_ = sess.run(g_opt, feed_dict={input_images: batch_images, input_z: batch_z, lr_G: learning_rate_G})
if i % 10 == 0:
train_loss_d = d_loss.eval({input_z: batch_z, input_images: batch_images})
train_loss_g = g_loss.eval({input_z: batch_z})
# Save it
image_name = str(i) + ".jpg"
image_path = "./images/" + image_name
show_generator_output(sess, 4, input_z, data_shape[3], data_image_mode, image_path, True, False)
# Print every 5 epochs (for stability overwize the jupyter notebook will bug)
if i % 1500 == 0:
image_name = str(i) + ".jpg"
image_path = "./images/" + image_name
print("Epoch {}/{}...".format(epoch_i+1, epochs),
"Discriminator Loss: {:.4f}...".format(train_loss_d),
"Generator Loss: {:.4f}".format(train_loss_g))
show_generator_output(sess, 4, input_z, data_shape[3], data_image_mode, image_path, False, True)
return losses, samplesHow to start
All this can be run right on your computer if you are ready to wait 10 years. So it is better to use cloud-based GPU services like AWS or FloydHub. Personally, I trained this DCGAN for 20 hours on Microsoft Azure and their Deep Learning Virtual Machine . I do not have a business relationship with Azure, I just like their customer service.
If you have any difficulties with running in a virtual machine, refer to this wonderful article .
If you improve the model, feel free to make a pull request.
