Julia and the movement of a charged particle in an electromagnetic field
- Tutorial

We fix the skills of solving and visualizing differential equations on the example of one of the most common evolutionary equations, recall the good old Scilab and try to understand whether we need it ... Under the cut of the picture (kilobyte per seven hundred)
julia>]
(v1.0) pkg>update
#успеете заварить чаю
(v1.0) pkg> status
Status `C:\Users\Игорь\.julia\environments\v1.0\Project.toml`
[537997a7] AbstractPlotting v0.9.0
[ad839575] Blink v0.8.1
[159f3aea] Cairo v0.5.6
[5ae59095] Colors v0.9.5
[8f4d0f93] Conda v1.1.1
[0c46a032] DifferentialEquations v5.3.1
[a1bb12fb] Electron v0.3.0
[5789e2e9] FileIO v1.0.2
[5752ebe1] GMT v0.5.0
[28b8d3ca] GR v0.35.0
[c91e804a] Gadfly v1.0.0+ #master (https://github.com/GiovineItalia/Gadfly.jl.git)
[4c0ca9eb] Gtk v0.16.4
[a1b4810d] Hexagons v0.2.0
[7073ff75] IJulia v1.14.1+ [`C:\Users\Игорь\.julia\dev\IJulia`]
[6218d12a] ImageMagick v0.7.1
[c601a237] Interact v0.9.0
[b964fa9f] LaTeXStrings v1.0.3
[ee78f7c6] Makie v0.9.0+ #master (https://github.com/JuliaPlots/Makie.jl.git)
[7269a6da] MeshIO v0.3.1
[47be7bcc] ORCA v0.2.0
[58dd65bb] Plotly v0.2.0
[f0f68f2c] PlotlyJS v0.12.0+ #master (https://github.com/sglyon/PlotlyJS.jl.git)
[91a5bcdd] Plots v0.21.0
[438e738f] PyCall v1.18.5
[d330b81b] PyPlot v2.6.3
[c4c386cf] Rsvg v0.2.2
[60ddc479] StatPlots v0.8.1
[b8865327] UnicodePlots v0.3.1
[0f1e0344] WebIO v0.4.2
[c2297ded] ZMQ v1.0.0Let's go through the previous guides
and proceed to the formulation of the problem
Motion of charged particles in the electromagnetic field
On a charged particle with a charge  moving in EMF with speed
moving in EMF with speed  Lorentz force acts:
Lorentz force acts: ![$ \ vec {F} _L = q \ left (\ vec {E} + \ left [\ vec {u} \ times \ vec {B} \ right] \ right) $](https://habrastorage.org/getpro/habr/formulas/75e/96b/bb5/75e96bbb5a66871d2539682cdf1c7323.svg) . This formula is valid for a number of simplifications. Neglecting the corrections to the theory of relativity, we assume that the particle mass is constant, so that the equation of motion has the form:
. This formula is valid for a number of simplifications. Neglecting the corrections to the theory of relativity, we assume that the particle mass is constant, so that the equation of motion has the form:![$ \ frac {d} {dt} (m \ vec {u}) = q \ left (\ vec {E} + \ left [\ vec {u} \ times \ vec {B} \ right] \ right) $](https://habrastorage.org/getpro/habr/formulas/410/928/1db/4109281db62e4d425b256ca87d1a2918.svg)
We direct the Y axis along the electric field, the Z axis along the magnetic field, and assume for simplicity that the initial velocity of the particle lies in the XY plane. In this case, the entire trajectory of the particle will also lie in this plane. The equations of motion will take the form:

Nondimensional:  . Asterisks denote dimensional values, and
. Asterisks denote dimensional values, and - the characteristic size of the considered physical system. We obtain the dimensionless system of equations of motion of a charged particle in a magnetic field:
- the characteristic size of the considered physical system. We obtain the dimensionless system of equations of motion of a charged particle in a magnetic field:

Lower the order:

As the initial configuration of the model, choose:  Tl
Tl  V / m
V / m  m / s For a numerical solution, we use the DifferentialEquations package :
m / s For a numerical solution, we use the DifferentialEquations package :
using DifferentialEquations, Plots
pyplot()
M = 9.11e-31# kg
q = 1.6e-19# C
C = 3e8# m/s
λ = 1e-3# mfunction modelsolver(Bo = 2., Eo = 5e4, vel = 7e4)
B = Bo*q*λ / (M*C)
E = Eo*q*λ / (M*C*C)
vel /= C
A = [0.0.1.0.;
0.0.0.1.;
0.0.0. B;
0.0. -B 0.]
syst(u,p,t) = A * u + [0.; 0.; 0.; E] # ODE system
u0 = [0.0; 0.0; vel; 0.0] # start cond-ns
tspan = (0.0, 6pi) # time period
prob = ODEProblem(syst, u0, tspan) # problem to solve
sol = solve(prob, Euler(), dt = 1e-4, save_idxs = [1, 2], timeseries_steps = 1000)
end
Solut = modelsolver()
plot(Solut)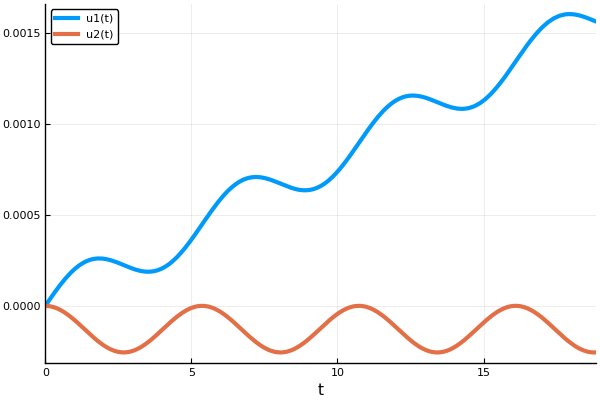
Здесь используется метод Эйлера, для которого задаётся количество шагов. Также сохраняется в матрицу ответов не всё решение системы, а только 1 и 2 индексы, то есть координаты икс и игрек (скорости нам не нужны).
X = [Solut.u[i][1] for i in eachindex(Solut.u)]
Y = [Solut.u[i][2] for i in eachindex(Solut.u)]
plot(X, Y, xaxis=("X"), background_color=RGB(0.1, 0.1, 0.1))
title!("Траектория частицы")
yaxis!("Y")
savefig("XY1.png")#сохраним график в папку с проектом
Check the result. Let's introduce instead of x a new variable . Thus, a transition to a new coordinate system is carried out, moving relative to the initial one at a speed u in the direction of the X axis :
. Thus, a transition to a new coordinate system is carried out, moving relative to the initial one at a speed u in the direction of the X axis :

If you choose  and mark
and mark  , the system will be simplified:
, the system will be simplified:

The electric field has disappeared from the last equations, and they represent the equations of motion of a particle under the action of a uniform magnetic field. Thus, the particle in the new coordinate system (x, y) should move in a circle. Since this new coordinate system itself moves relative to the original one at a speed, then the resulting motion of the particle will consist of a uniform motion along the X axis and rotation around the circle in the XY plane . As is known, the trajectory arising from the addition of such two movements, in the general case, is a trochoid . In particular, if the initial velocity is zero, the simplest case of such a motion is realized - along the cycloid .
Make sure that the drift velocity went really equal to E / B . For this:
- subtract the response matrix by replacing the first element (maximum) with the obviously lower value
- find the number of the maximum element in the second column of the matrix of answers, which is deposited on the ordinate
- calculate the dimensionless drift velocity by dividing the maximum abscissa value by the corresponding time value
Y[1] = -0.1
numax = argmax( Y )
X[numax] / Solut.t[numax]Out: 8.334546850446588e-5
B = 2*q*λ / (M*C)
E = 5e4*q*λ / (M*C*C)
E/BOut: 8.333333333333332e-5
Up to seventh order!
For convenience, we will define a function that takes the parameters of the model and the signature of the graphic, which will also serve as the name of the png file created in the project folder (works in Juno / Atom and Jupyter). Unlike Gadfly , where graphs were created in layers , and then output by the plot () function , in Plots, in order to create different graphs in one frame, the first one is created by the plot () function , and subsequent ones are added using plot! () . The names of functions that change received objects in Julia are usually terminated with an exclamation mark.
functionplotter(ttle = "qwerty", Bo = 2, Eo = 4e4, vel = 7e4)
Ans = modelsolver(Bo, Eo, vel)
X = [Ans.u[i][1] fori in eachindex(Ans.u)]
Y = [Ans.u[i][2] fori in eachindex(Ans.u)]
plot!(X, Y)
p = title!(ttle)
savefig( p, ttle * ".png" )
endAt zero initial speed, as expected, we obtain a cycloid :
plot()
plotter("Zero start velocity", 2, 4e4, 7e4)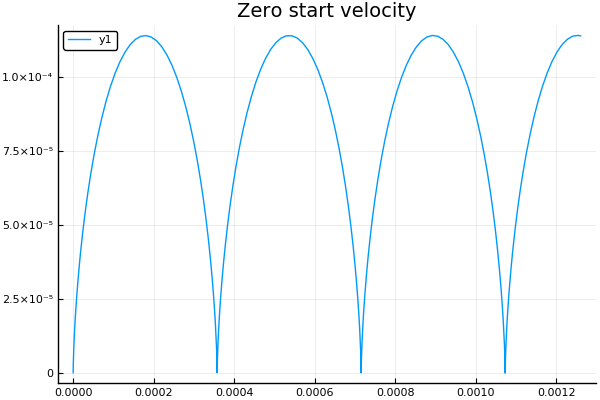
We obtain the trajectory of the particle when the induction is zeroed, the intensity and when the charge sign changes. Let me remind you that the dot means alternately performing the function with all the elements of the array
plot()plotter.("B занулено Е варьируется", 0, [3e44e45e46e4] )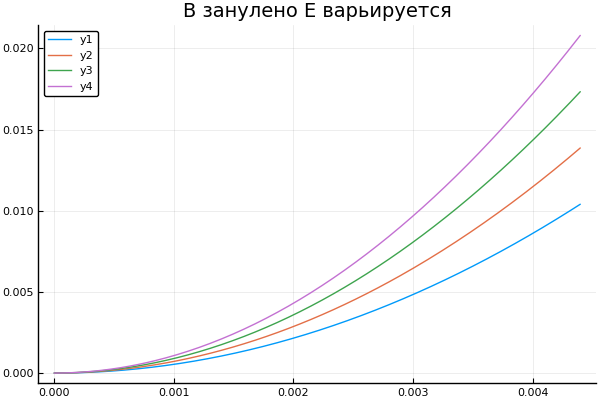
plot()plotter.("E занулено B варьируется", [1234], 0 )
q = -1.6e-19# C
plot()
plotter.("Отрицательный заряд")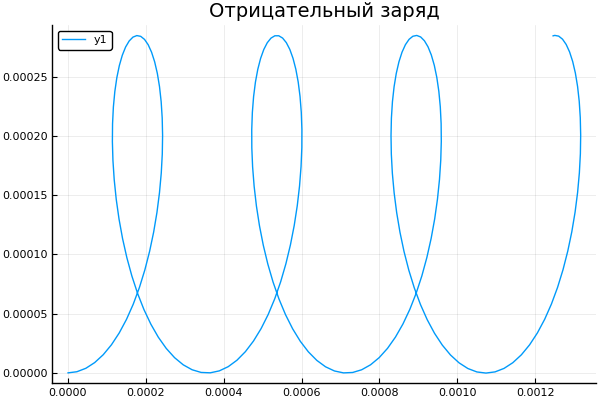
plot()plotter.("Варьирование скорости", 2, 5e4, [2e44e46e48e4] )
A bit about Scilab
On Habré there is already enough information about Sylab, for example, 1 , 2 , and here about Octave, therefore, we limit ourselves to links to Wikipedia and to the home page .
From myself I will add, about the presence of a convenient interface creation with checkboxes, buttons and graph output, and a rather interesting Xcos visual modeling tool. The latter can be used, for example, to simulate a signal in electrical engineering:
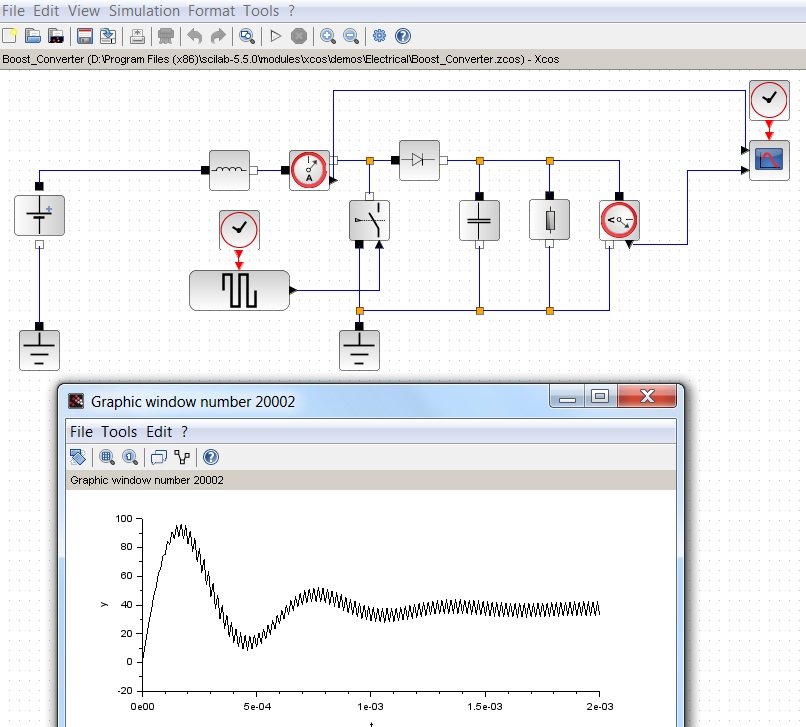

И здесь очень удобное руководство: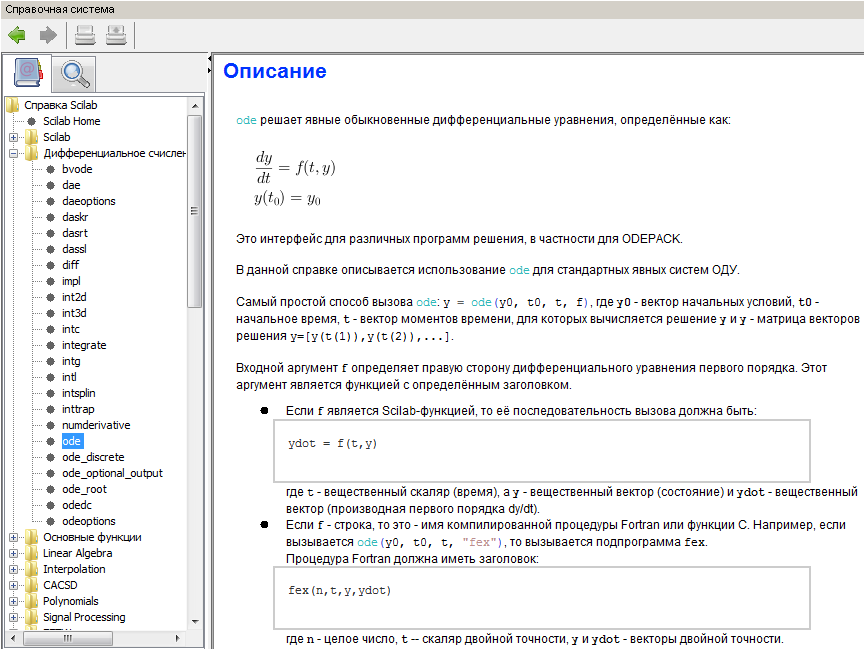
Actually, our task can be solved in Scilab:
clear
function du = syst(t, u, A, E)
du = A * u + [0; 0; 0; E] // ODE system
end
function [tspan, U] = modelsolver(Bo, Eo, vel)
B = Bo*q*λ / (M*C)
E = Eo*q*λ / (M*C*C)
vel = vel / C
u0 = [0; 0; vel; 0] // start cond-ns
t0 = 0.0
tspan = t0:0.1:6*%pi // time period
A = [0010;
0001;
000 B;
00 -B 0]
U = ode("rk", u0, t0, tspan, list(syst, A, E) )
end
M = 9.11e-31// kg
q = 1.6e-19// C
C = 3e8// m/s
λ = 1e-3// m
[cron, Ans1] = modelsolver( 2, 5e4, 7e4 )
plot(cron, Ans1 )
xtitle ("Безразмерные координаты и скорости","t","x, y, dx/dt, dy/dt");
legend ("x", "y", "Ux", "Uy");
scf(1)//создание нового графического окна
plot(Ans1(1, :), Ans1(2, :) )
xtitle ("Траектория частицы","x","y");
xs2png(0,'graf1');// можно сохранять графики в разных форматах
xs2jpg(1,'graf2');// правда, работает через-раз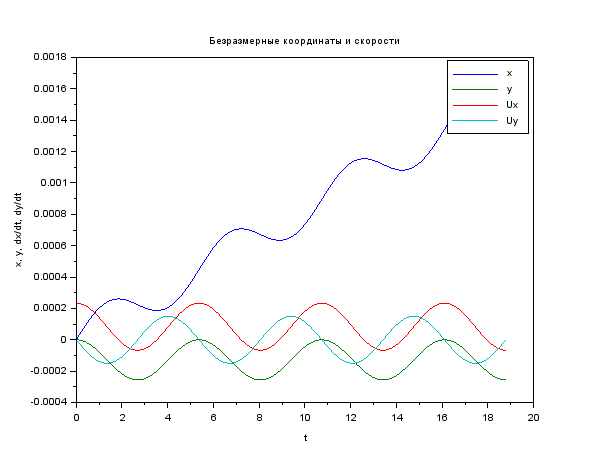

Here is the function information for solving ode diffs . In principle, the question arises
And why do we need Julia?
... if so there are such wonderful things as Scilab, Octave and Numpy, Scipy?
About the last two I will not say - did not try. And in general, the question is difficult, so let's estimate it:
Scilab
On hard will take a little more than 500 MB, it starts quickly and immediately available and the difrosciting, and graphics and everything else. Good for beginners: an excellent guide (mostly localized), there are many books in Russian. About internal errors have already been said here and here , and since the product is very niche, the community is sluggish, and the additional modules are very scarce.
Julia
As you add packages (especially every kind of pitons a la Jupyter and Mathplotlib) it grows from 376 MB to quite six plus gigabytes. She also does not spare the operative: at the start of 132 MB, and after filling in the schedules in Jupiter, it will calmly reach 1 GB. If you work in Juno , then everything is almost like in Scilab : you can execute the code immediately in the interpreter, you can print in the built-in notepad and save as a file, there is a variable browser, command log and online help. Personally, I am indignant at the absence of clear () , that is, I launched the code, then began to correct and rename there, and the old variables remained (there is no variable browser in Jupiter).
But all this is not critical. Scilab fits perfectly on the first couple, making a lab, curving or counting something intermediate is a very useful tool. Although here, too, there is support for parallel computing and calling of sish / Fortran functions, for which it cannot be used seriously. Large arrays plunge it into horror, to set multidimensional, you have to do all sorts of obscurantism , and calculations beyond the framework of classical problems may well drop everything along with the operating system.
And after all these pains and disappointments, you can safely switch to Julia , in order to get more here. We will continue to learn, the benefit of the community is very responsive, problems get shaken quickly, and Julia has many interesting features that will make the learning process a fascinating journey!