The Magic of Tensor Algebra: Part 18 - Mathematical Modeling of the Janibekov Effect
Content
- What is a tensor and why is it needed?
- Vector and tensor operations. Tensor Ranks
- Curvilinear coordinates
- The dynamics of a point in tensor exposition
- Actions on tensors and some other theoretical questions
- Kinematics of a free solid. The nature of angular velocity
- The final rotation of a solid. Properties of the rotation tensor and method of its calculation
- On convolutions of the Levi-Civita tensor
- The derivation of the angular velocity tensor through the parameters of the final rotation. Apply the head and Maxima
- We get the angular velocity vector. Working on shortcomings
- Acceleration of a body point in free movement. Angular acceleration of a solid
- Rodrigue Hamilton Parameters in Solid State Kinematics
- SKA Maxima in problems of transformation of tensor expressions. Angular velocity and acceleration in the parameters of Rodrigue Hamilton
- Non-standard introduction to the dynamics of a rigid body
- Proprietary Solid Motion
- Properties of the inertia tensor of a solid
- Sketch of a nut Janibekova
- Mathematical modeling of the Janibekov effect
Introduction
The previous article was supposed to be about the numerical simulation of the Janibekov effect, but it suddenly occurred to me that this effect can be investigated qualitatively, albeit by a fairly approximate first Lyapunov method. However, numerical simulation is also a very interesting question, especially lying in the plane of my research problems. Therefore, today we
- Finally, we will determine how to use the Rodrigue-Hamilton parameters to describe the orientation of the body in space
- Consider the forms of representation of the equations of motion of a free body: we show how tensor equations can be converted into matrix and component ones.
- Let us simulate the motion of a free rigid body with various ratios between the main moments of inertia and show how the Janibekov effect manifests itself.
1. Differential equations of free motion in tensor form
We have repeatedly considered these equations in vector form
The vector notation is convenient for a general analysis of the nature of dependencies, it is familiar and it shows what a particular term means. However, to further transform the equations into a form convenient for modeling, we turn to tensor notation
where
The system of equations (2) is already closed, integrating it you can get the law of motion of the center of mass and the dependence of the angular velocity of the body on time. But, we will still be interested in the orientation of the body, so we supplement this system of equations
Equation (3) is nothing more than a representation of the components of the angular velocity through the Rodrigue-Hamilton orientation parameters. We have already received this expression in previous articles . Now we will consider it as a differential equation relating orientation parameters to angular velocity components.
However, the Rodrigue-Hamilton parameters are redundant - there are four of them, and three coordinates are sufficient to describe the orientation of the body in space. And the number of unknowns in system (2), (3) exceeds the number of equations by one. So we will have to supplement equations (2) and (3) with the equation of relationship between the orientation parameters. In the article on the parameters of Rodrigue-Hamilton, we showed that the rotation of the body is conveniently described by a single quaternion, which is
or, in tensor form
We differentiate (4) in time
Given the commutativity of the scalar product, we assume
and there is the desired equation of communication. The complete system of equations of motion of a free rigid body in tensor form will have the form
Pretty scary - (6) contains 13 first-order nonlinear differential equations with 13 unknown quantities. It looks scary because of the general tensor notation, but when moving to specific coordinates, in our case the Cartesian ones, system (6) will be greatly simplified.
2. The matrix form of the differential equations of motion of a rigid body in a Cartesian basis
We introduce a column vector of the phase coordinates of the body
where
In the Cartesian basis, the metric tensor is represented by the identity matrix and the Christoffel symbols are equal to zero, therefore, system of equations (6) can be written in matrix form as follows
where matrices are introduced
Solving system (7) with respect to the first derivatives, we obtain
the system of equations of motion in the form of Cauchy.
3. Modeling the effect of Janibekov
In the absence of external force factors, the right-hand side of system (8) is zero, and the equation of motion of the center of mass is easily integrated, taking into account the initial conditions
The rotation of the nut is described by a system of seven first-order equations, which we obtain from (8), introducing dimensionless moments of inertia
For numerical integration of system (9), we set the initial conditions
where
For parameter values
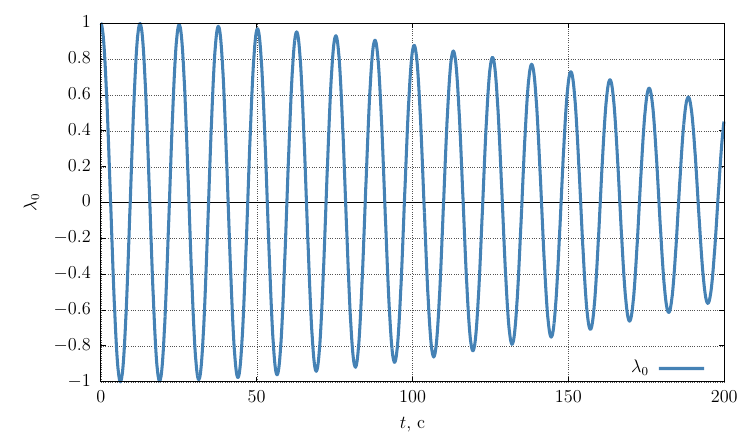
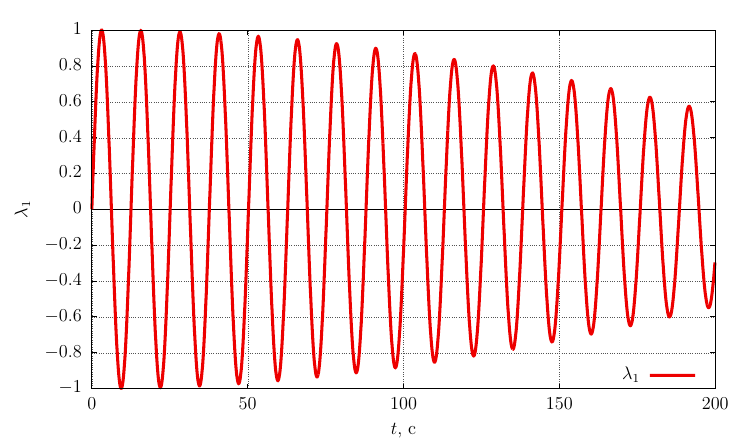
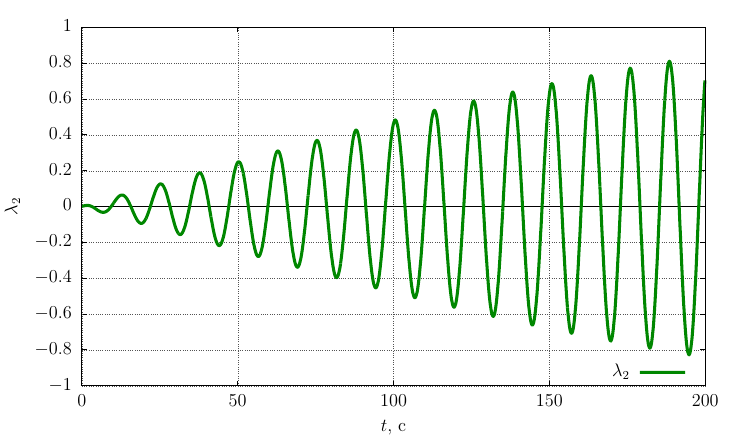
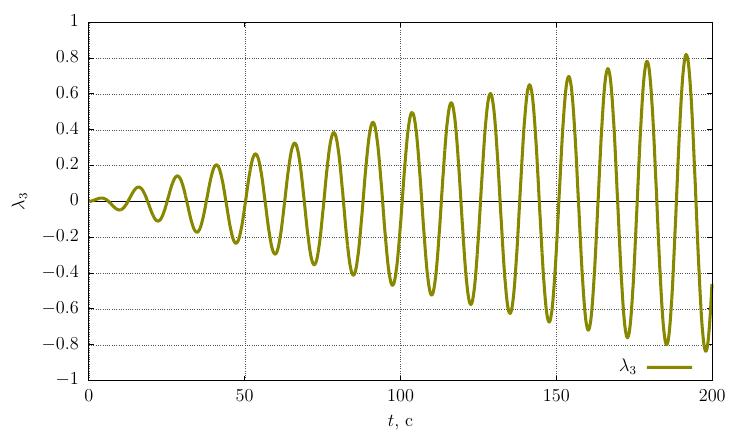
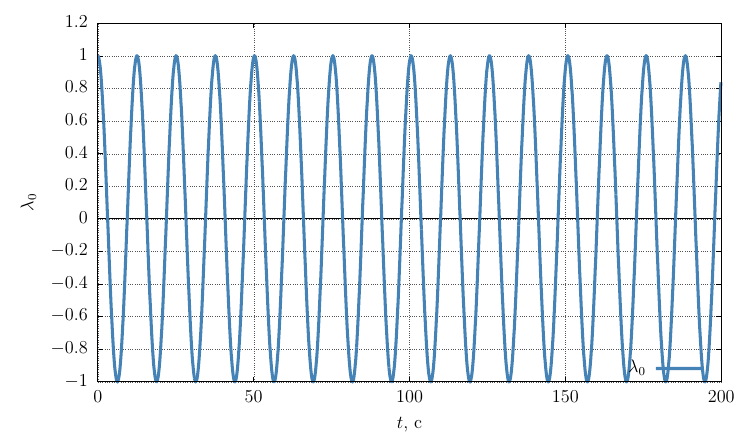
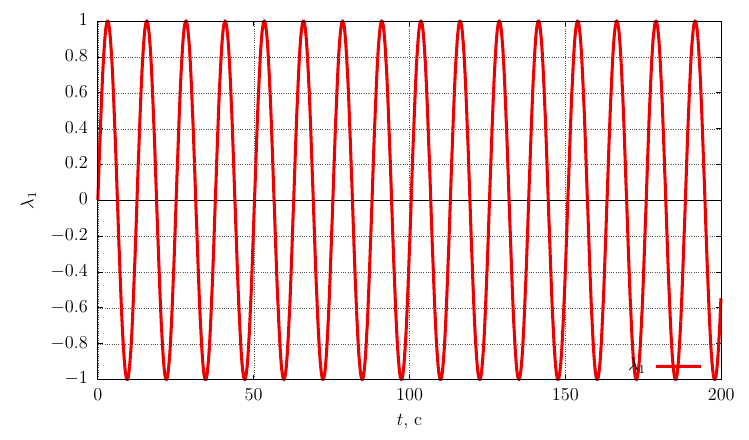
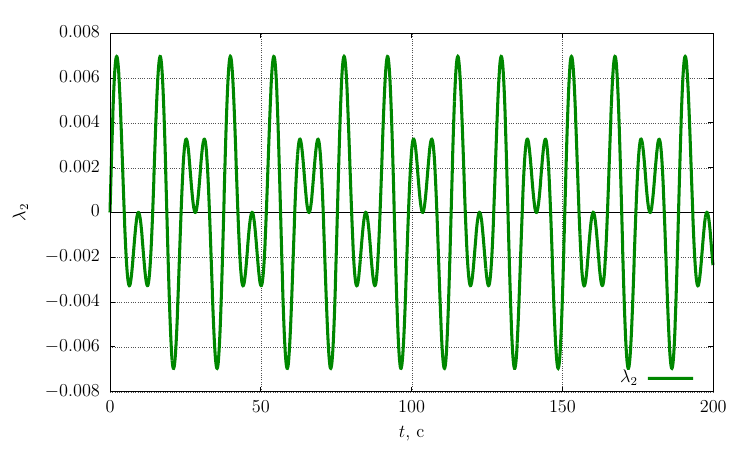
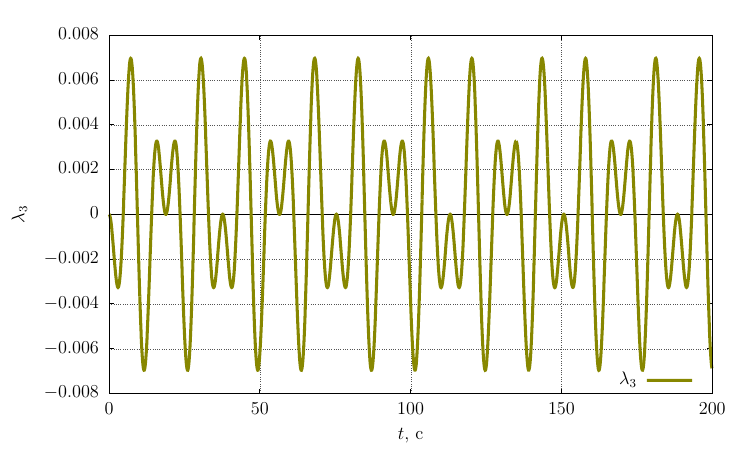
Rodrigue-Hamilton orientation parameters
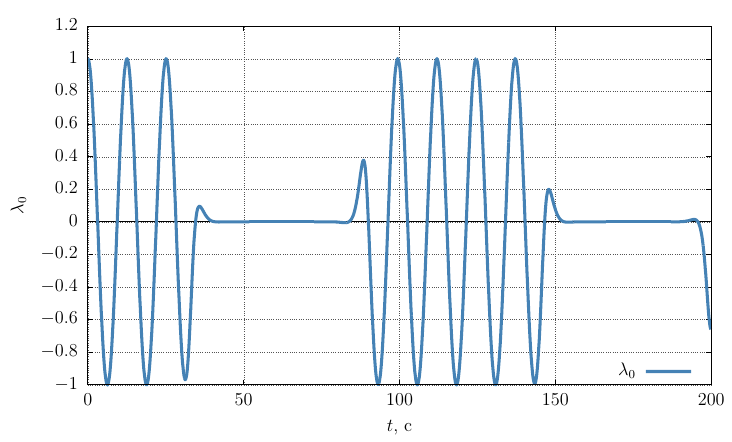
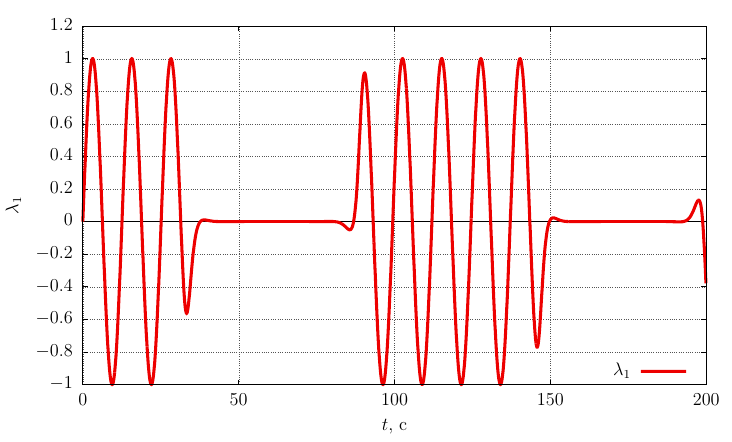
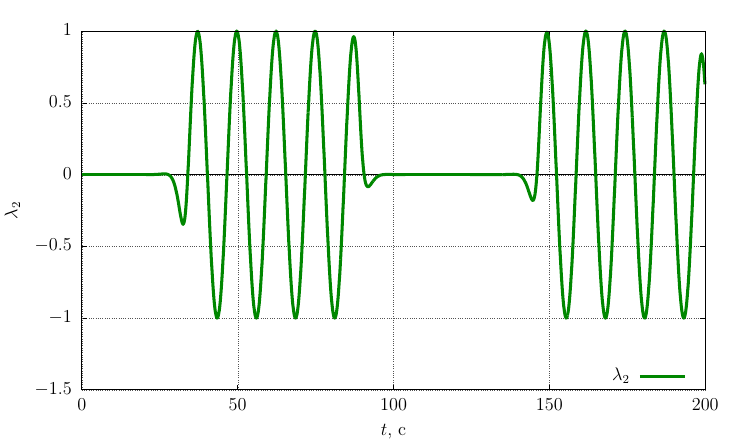
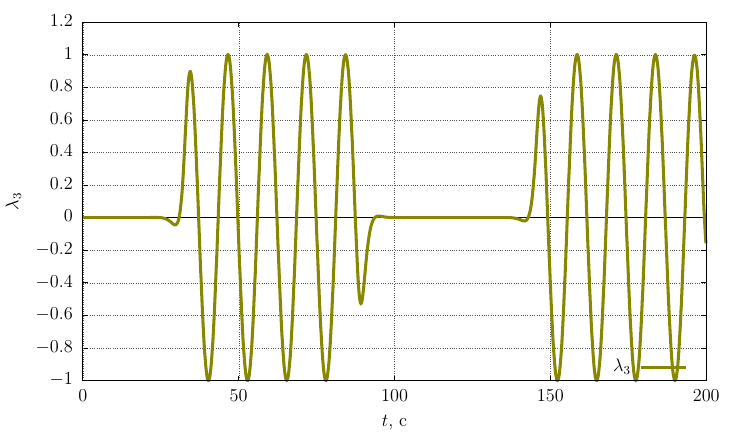
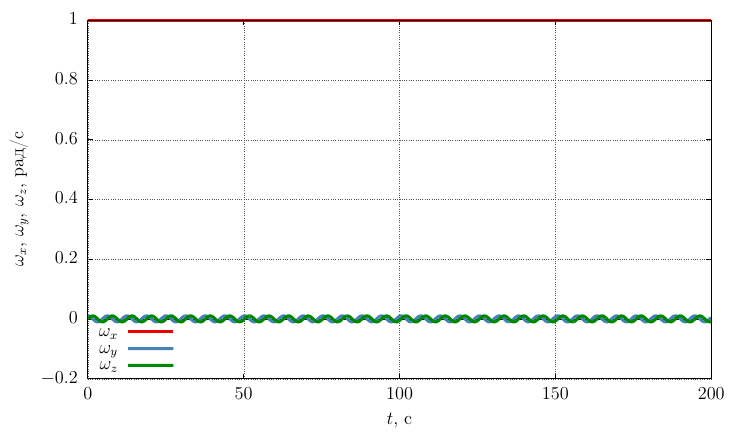
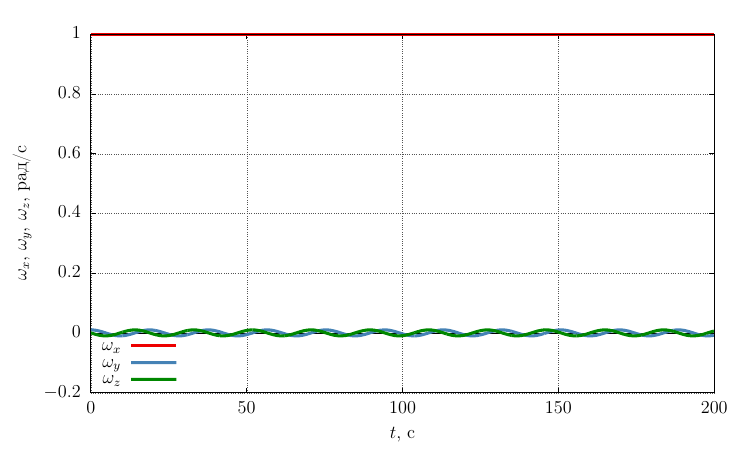
Projections of angular velocity on eigen axes
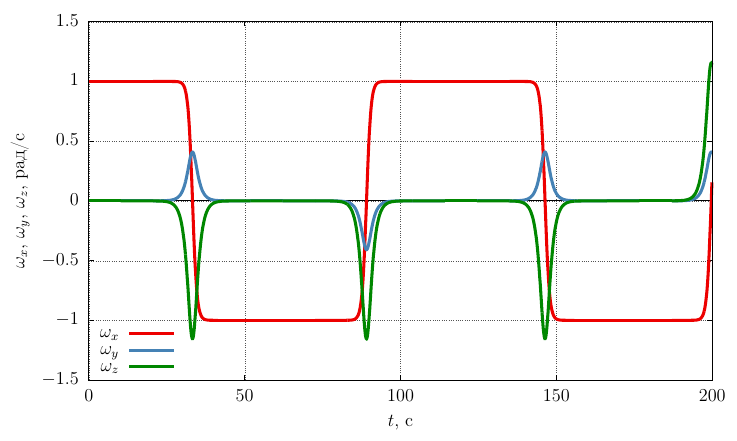
From the graphs it can be seen that, for
Compare the result with the movement of the body twisted around the axis with the maximum moment of inertia, that is, put
Rodrigue-Hamilton orientation parameters
Projections of the angular velocity on its own axes
It can be seen that, with a sufficiently significant perturbation of the angular velocity, the motion remains stable rotation around the axis
A similar picture is observed for a body twisted around an axis with a minimum moment of inertia (
Orientation parameters Rodrigue-Hamilton The
projections of the angular velocity on its own axes
The precession frequency is significantly lower than when twisting around an axis with a maximum moment of inertia, which is logical, since the oscillations occur around the axis with a larger moment of inertia than in the case
Conclusion
All calculations were performed by the author in SKA Maple 18. The graphs are built from the calculation log using the Kile + LaTeX + gnuplot bundle.
I would also like to make an animation, but the author’s experience in this matter is extremely small. Therefore, I would like to ask readers a question - is there software (for Linux / Windows) that can be used to create an animation clip illustrating body movement with a set of values of orientation quaternion parameters depending on time? I suspect that this can be done with Blender 3D, but I'm not sure.
In the meantime, thank you for your attention!
Upd :
Acknowledgments
However, I completely forgot to write that this article (and the previous one) was prepared using the Markdown & LaTeX Editor web application , developed by the user parpalak . This system allows you to type articles in Makdown and LaTeX and generates code suitable for direct insertion into the Habra editor. I am grateful to the author for participating in product testing. With his permission, I recommend this system for use in the preparation of mathematical texts of articles
To be continued ...