Regular polyhedrons. Part 1. Three-dimensional
- From the sandbox
- Tutorial
Introduction Statement of a question.
In the school curriculum, unfortunately, spherical geometry and Lobachevsky geometry are not studied. Meanwhile, their study together with Euclidean geometry allows a deeper understanding of what is happening with objects. For example, to understand the relationship of regular polyhedra with partitions of a sphere, partitions of the Euclidean plane and partitions of the Lobachevsky plane.
The knowledge of the geometry of spaces of constant curvature helps to rise above three-dimensionality and to reveal polyhedra in spaces of dimension 4 and higher. The issues of finding polytopes, finding partitions of spaces of constant curvature, deriving the dihedral angle formula of a regular polyhedron in n-dimensional space are so closely intertwined that it turned out to be difficult to put all this into the title of the article. Let the focus be on, understandable, regular polyhedra, although they are not only the result of all conclusions, but also, at the same time, an instrument for comprehending spaces of higher dimensions and evenly curved spaces.
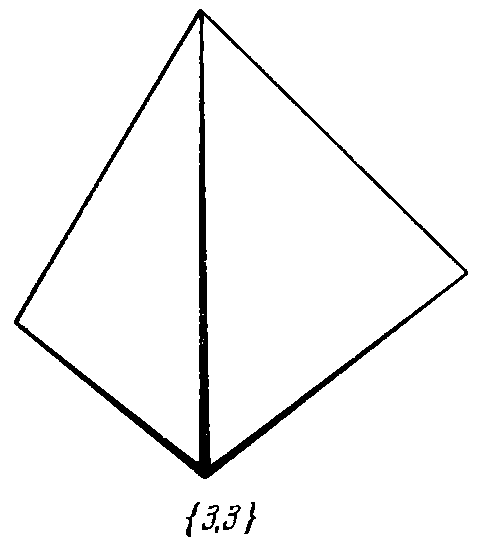
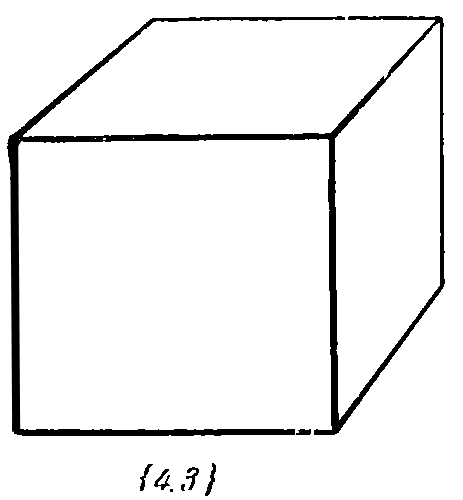
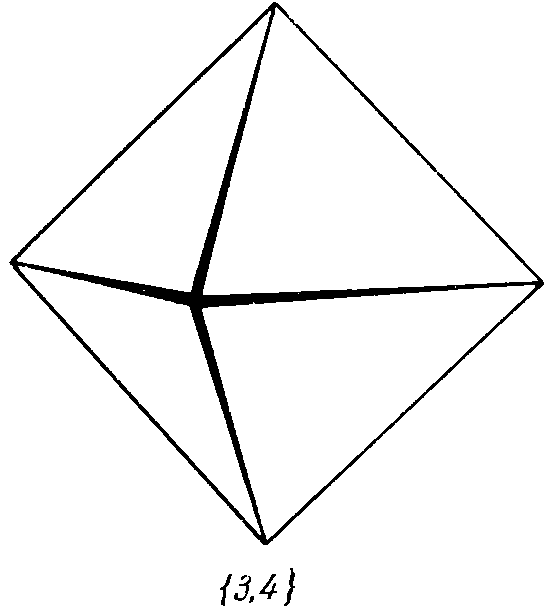
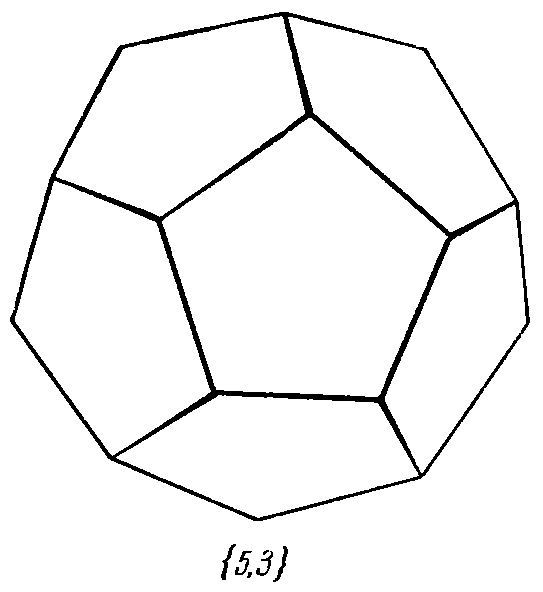
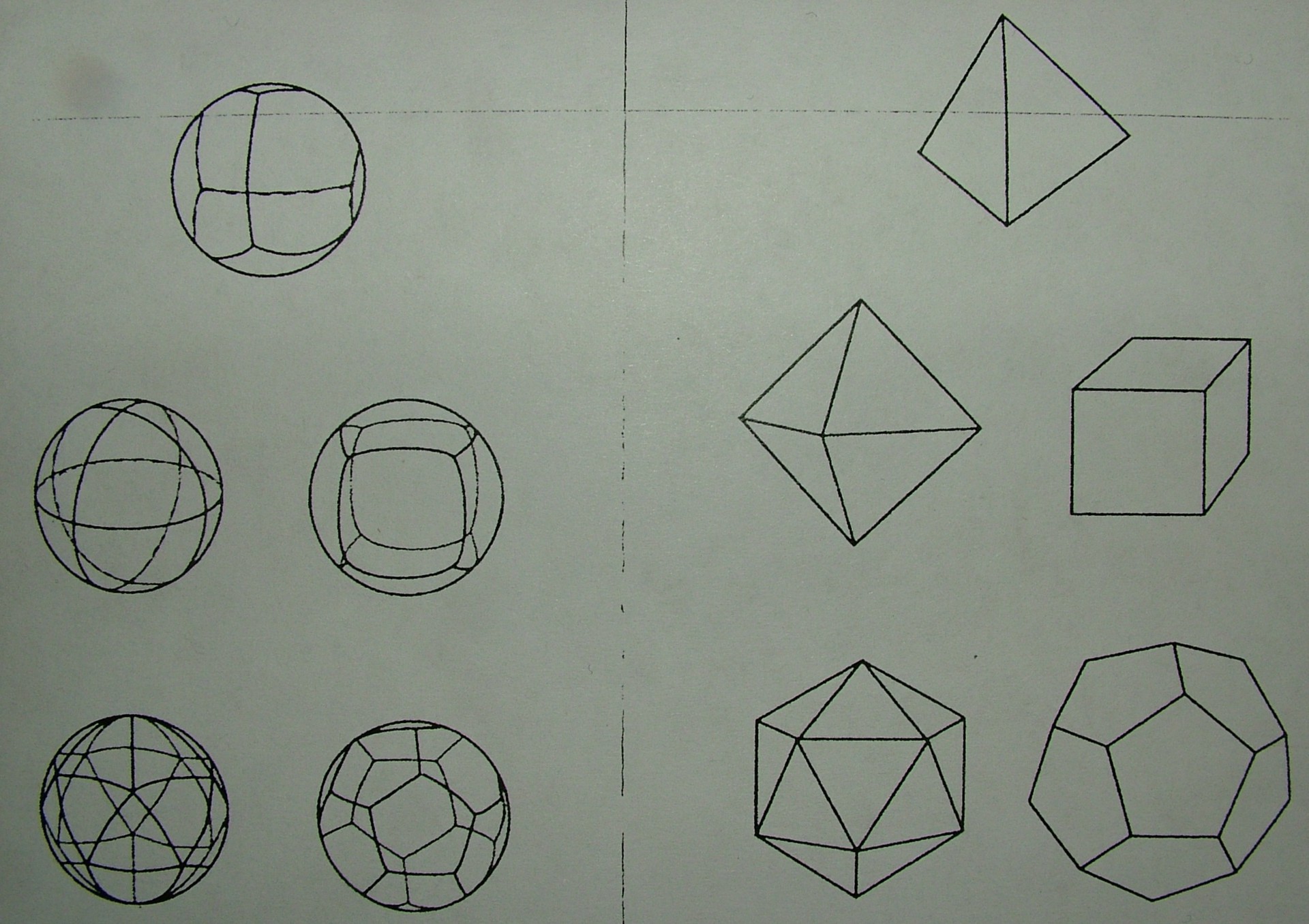
For those who don’t know (forgot), I inform (recall) that in the usual three-dimensional Euclidean space there are only five regular polyhedra:
| 1. Tetrahedron: | 2. Cube: | 3. Octahedron: | 4. Dodecahedron: | 5. Icosahedron: |
 |  |  |  |  |
In three-dimensional space, a regular polyhedron is a convex polyhedron in which all vertices are equal to each other, all edges are equal to each other, all faces are equal to each other and the faces are regular polygons.
A regular polygon is a convex polygon in which all sides are equal to each other and all angles are equal to each other.
The vertices are equal to each other means that the number of edges and the number of faces matching each vertex are the same and they fit at the same angles at each vertex.
It turns out that regular polyhedra are conveniently denoted by the Shlefli symbol {p1, p2}, which characterizes their combinatorial structure. Which means that p1 squares converge on p2 pieces at the top. Those. by definition p1, p2 are integers greater than or equal to 3. For those who are not familiar with the concept of Shlefly's Symbol, he wrote a separate article with pictures of Shlefly's Symbol. Part 2.6.
In such an entry, our polyhedra will receive the notation:
1. Tetrahedron {3, 3},
2. Cube {4, 3},
3. Octahedron {3, 4},
4. Dodecahedron {5, 3},
5. Icosahedron { 3, 5}
For example, {4, 3} - a cube has 4 coal faces, 3 such faces converge at each vertex.
In the octahedron {3, 4}, on the contrary, the faces 3 are coal, 4 pieces converge at the vertex.
Thus, the Schlefli symbol completely determines the combinatorial structure of the polyhedron.
Why are there only 5 regular polyhedra? Maybe there are more?
In order to fully answer this question, you must first get an intuitive idea of geometry on the sphere and on the Lobachevsky plane. Those who do not yet have such an idea will try to give the necessary explanations.
Sphere
1. What is a point on a sphere? I think that everyone is intuitive. It’s not mentally difficult to imagine a point on a sphere.

2. What is a segment on a sphere? We take two points and connect them with the shortest distance on the sphere, we get an arc, if you look at the sphere from the side.

3. If you continue this segment in both directions, then it closes and you get a circle. In this case, the plane of the circle contains the center of the sphere, this follows from the fact that we connected the two starting points with the shortest, and not arbitrary, distance. It looks like a circle from the side, and in terms of spherical geometry it is a straight line, as it was obtained from a segment, continuing to infinity on both sides.

4. And finally, what is a triangle on a sphere? We take three points on the sphere and connect them with segments.

By analogy with a triangle, you can draw an arbitrary polygon on a sphere. The property of a spherical triangle, which consists in the fact that the sum of the angles of such a triangle is more than 180 degrees, to which we are used to in the Euclidean triangle, is fundamentally important for us. Moreover, the sum of the angles of two different spherical triangles is different. The larger the triangle, the MORE it has the sum of the angles.

Accordingly, there appears the 4th sign of the equality of triangles on the sphere - at three angles: two spherical triangles are equal to each other if they have the corresponding angles equal.
For simplicity, the sphere itself is easier not to draw, then the triangle will look a bit bloated:

The sphere is also called the space of constant positive curvature. The curvature of space just leads to the fact that the shortest distance is an arc, and not a straight line that is familiar to us. The segment is curved, as it were.
Lobachevsky
Now that we have become familiar with geometry on the sphere, understanding the geometry on the hyperbolic plane, discovered by the great Russian scientist Nikolai Ivanovich Lobachevsky, will also not be difficult, since everything happens similarly to the sphere, only “inside out”, “vice versa”. If the arcs on the sphere were drawn with circles, with the center inside the sphere, then now the arcs must be drawn in circles with the center outside the sphere.
Let's get started. We will represent the Lobachevsky plane in the interpretation of Poincare II (Jules Henri Poincare, the great French scientist), this interpretation of the Lobachevsky geometry is also called the Poincare disk.
1. A point in the Lobachevsky plane. A point - it is a point in Africa.

2. A segment on the plane of Lobachevsky. We connect the two points by a line along the shortest distance in the sense of the Lobachevsky plane.

The shortest distance is constructed as follows:

We must draw a circle orthogonal to the Poincare disk, through the given two points (Z and V in the figure). The center of this circle will always be outside the disk. The arc connecting the initial two points will be the shortest distance in the sense of the Lobachevsky plane.
3. Removing the auxiliary arcs, we obtain the line E1 - H1 in the Lobachevsky plane.

Points E1, H1 "lie" at infinity of the Lobachevsky plane, in general, the edge of the Poincare disk is all the infinitely distant points of the Lobachevsky plane.
4. And finally, what is a triangle in the Lobachevsky plane? We take three points and connect them with segments.

By analogy with a triangle, you can draw an arbitrary polygon on the Lobachevsky plane. The property of a hyperbolic triangle, which consists in the fact that the sum of the angles of such a triangle is always less than 180 degrees, which we are used to in the Euclidean triangle, is fundamentally important for us. Moreover, the sum of the angles of two different hyperbolic triangles is different. The larger the triangle in area, the LESS it has the sum of the angles.

Accordingly, here, too, there is the 4th sign of equality of hyperbolic triangles - in three angles: two hyperbolic triangles are equal if they have corresponding angles.
For simplicity, the Poincare disk itself can sometimes not be drawn, then the triangle will look a bit “shrunken”, “deflated”:

The Lobachevsky plane (and generally the Lobachevsky space of any dimension) is also called the space of constant NEGATIVE curvature. The curvature of space just leads to the fact that the shortest distance is an arc, and not a straight line that is familiar to us. The segment is curved, as it were.
Regular partitions of a two-dimensional Sphere and regular three-dimensional polyhedra
Everything said about the sphere and the Lobachevsky plane refers to two-dimensionality, i.e. the surface of the sphere is two-dimensional. What does this have to do with the three-dimensionality indicated in the title of the article? It turns out that each three-dimensional regular Euclidean polyhedron has its own partition of the two-dimensional sphere one-to-one. This is best seen in the figure:
In order to obtain a partition of a sphere from a regular polyhedron, it is necessary to describe a sphere around the polyhedron. The vertices of the polyhedron will appear on the surface of the sphere, connecting these points with segments on the sphere (arcs), we obtain a partition of the two-dimensional sphere into regular spherical polygons. For example, we made a video demonstration of how an icosahedron corresponds to splitting a sphere into spherical triangles and vice versa, like splitting a sphere into spherical triangles, converging five in apex, corresponds to an icosahedron.
In order to construct a polyhedron using the partition of a sphere, the vertices of the partition corresponding to arcs must be connected by ordinary, rectilinear, Euclidean segments.
Accordingly, the Shlefli symbol of the icosahedron {3, 5} - triangles converging in five pieces at the vertex, defines not only the structure of this polyhedron, but also the structure of the partition of the two-dimensional sphere. Similarly with other polyhedrons, their Shlefli symbols also determine the structure of the corresponding partitions. Moreover, partitions of the Euclidean plane and the Lobachevsky plane into regular polygons can also be specified by the Shlefli symbol. For example, {4, 4} - quadrangles converging in four - this is a familiar notebook for us in a box, that is, this is the partition of the Euclidean plane into squares. Are there any other partitions of the Euclidean plane? We will see further.
Partitions of a two-dimensional sphere, Euclidean plane and Lobachevsky plane
To construct partitions of two-dimensional spaces of constant curvature (this is the common name of these three spaces) we need elementary school geometry and the knowledge that the sum of the angles of a spherical triangle is more than 180 degrees (more than Pi), that the sum of the angles of a hyperbolic triangle is less than 180 degrees (less than Pi) and What is the Shlefly symbol. All of this has already been said above.
So, let's take an arbitrary Schleufly symbol {p1, p2}, it defines a partition of one of three spaces of constant curvature (for a plane this is true, for spaces of higher dimensions the situation is more complicated, but nothing prevents us from exploring all combinations of the symbol).

Consider a regular p1 square, draw segments connecting its center and vertices. We get p1 pieces of an isosceles triangle (the figure shows only one such triangle). The sum of the angles of each of these triangles is denoted by t and we express t in terms of pi and the lambda coefficient.

Then if lambda = 1, then the Euclidean triangle, i.e. is in the Euclidean plane, if lamda is in the interval (1, 3), then this means that the sum of the angles is greater than pi and this triangle is spherical (it is not difficult to imagine that when the spherical triangle increases in the limit, a circle with three points on it, in at each point, the angle of the triangle is equal to pi, and in the sum 3 * pi. This explains the upper boundary of the interval = 3). If lambda is in the interval (0, 1), then the triangle is hyperbolic, since the sum of the angles is less than pi (i.e., less than 180 degrees). Briefly, this can be written as follows:

It is not difficult to calculate that:

On the other hand, for the convergence at the vertex p2 of pieces (i.e., an integer) of the same polygons, it is necessary that

Equating the expressions for 2 * betta found from the convergence condition and from the polygon:

We got an equation that shows which of the three spaces the figure defined by its Schlefli symbol {p1, p2} divides. To solve this equation, we must also recall that p1, p2 are integers greater than or equal to 3. This, so to speak, follows from their physical meaning, since these are p1 squares (at least 3 angles) converging in p2 pieces at the top (also at least 3, otherwise it will not work).
The solution to this equation is to sort through all possible values for p1, p2 greater than or equal to 3 and calculate the lambda value. If it turns out to be 1, then {p1, p2} splits the Euclidean plane, if more than 1 but less than 3, then this is a partition of the Sphere, if from 0 to 1, then this is a partition of the Lobachevsky plane. All these calculations are conveniently tabulated.

This shows that:
1. The sphere corresponds to only 5 decisions, when the lamda is more than 1 and less than 3, they are highlighted in green in the table. These are: {3, 3} - a tetrahedron, {3, 4} - an octahedron, {3, 5} - an icosahedron, {4, 3} - a cube, {5, 3} - a dodecahedron. Their pictures were presented at the beginning of the article.
2. Only three solutions correspond to Euclidean plane partitions, when lamda = 1, they are highlighted in blue in the table. This is what these partitions look like.



3. And finally, all other combinations {p1, p2} correspond to partitions of the Lobachevsky plane, respectively, such partitions are infinite (countable) in number. It remains only to illustrate some of them, for example.
{3, 7}

{4, 5}

{4, 6}

{4, 7}

{5, 4}

{5, 5}

{5, 6}

{5, 7}

{6, 4}

Summary
Thus, there are only 5 regular polyhedra, they correspond to five partitions of the two-dimensional sphere, there are only 3 partitions of the Euclidean plane, and countably many partitions of the Lobachevsky plane.
What is the application of this knowledge?
There are people who are directly interested in partitioning the sphere: dxdy.ru/topic62800.html ,
There are articles on Habré ( here ), which also discuss the interpretation of Lobachevsky geometry. This article may help someone better understand and get acquainted with the Lobachevsky geometry.
Knowing the polyhedra also helps to answer the question: how many regular hexagons do a soccer ball have and how many pentagons. Knowing that a soccer ball is a truncated icosahedron, you can immediately give an answer to this question: there are as many pentagons as there are vertices in an icosahedron, so many hexagons as there are faces in an icosahedron, so there are 12 pentagons, 20 hexagons.
Yes, I would also like to talk about combinatorial the formula for calculating the number of vertices, edges and faces of these five regular polyhedra, but this is the next time. And without that, it somehow turned out to be difficult, although I was counting on the school level of knowledge of readers.
Also in the next article, in the presence of readers' interest, I plan to show how this approach is generalized to spaces of higher dimensions.
For me personally, knowledge of partitions allows me to understand the structure of these spaces, especially relevant in dimensions higher than 3.
If you do not have enough three-dimensional space, you understand this publication and would like to climb higher in dimension, then "go to the next level" :)
Links:
Regular polyhedra . Part 1. Three-dimensional
regular polyhedrons. Part 2. Four-dimensional
regular polyhedrons. Part 2.5 (auxiliary)
The symbol Shafly. Part 2.6