As we did BelAZ. Part 3 - Commissioning on the cut

This is the third article in the series about the dump truck ( first , second ). Now we are going to the quarry, install electrical equipment on the car and go on the first flight! But, of course, so simple, with a swoop, does not go, and I will tell you about the many problems that we encountered during a business trip. Although we tested all the equipment on the laboratory bench in the last article, reality beats from a completely different angle. This article will be a lot of videos and photos!
Assembly machine
The dump truck on which our equipment was placed is operated at a quarry in the Kemerovo Region. Coal is mined there, so it is more correct to call this place a cut (coal mines are usually called cuts). Panorama in the context of the most common for such places:

But, of course, the car was not going in the middle of the road. In the operation of such equipment should be the place where it serve. Such a place in our case was a large hangar, a kind of “garage” for dump trucks. There they change tires, repair and care in every possible way. Actually, there was a job on replacing one electric transmission, the old one, with our new one on one of the dump trucks.
The weather on arrival was what was needed (see the thermometer readings on the LED panel):

It was warmer in the workshop, but since the doors were always opening / closing for the passage of cars, it was impossible to work there without a warm jacket.
Here the old control cabinet is dismantled from the machine with a crane:

Next, remove the traction motors:

The engines are inserted into a kind of “barrel” of the rear axle. At the engine, the shaft comes out from two sides - on one side, inside the barrel, on it is placed a mechanical brake, and on the other side the wheel gearbox is screwed. On top of the gearbox bolts is mounted disk with a tire.
Here on this photo workers mount brake calipers on our traction engine.

Mechanical brake on such machines is used as an emergency and parking. In motion, they are not regularly braked, since then everything inside the barrel will heat up and light up - there is no place to take away the mechanical braking energy. Also in the photo you can see how all the wires go out in the same direction, which are then connected to the terminal block inside the barrel.
Next to the deck (yes, the BelAZ has a deck) a control cabinet is installed.

Note that the new cabinet is significantly lower than the previous one (compare with the photo above, where the tap lifted the old cabinet). This gives the driver a larger view in the right window.
Do you remember the anecdote: “There can be up to six people in the first-aid kit of the BelAZ for outpatient treatment”? So, in fact, the cabin is very small, narrow and there are exactly two seats. The design inside can’t be called refined, but functionally everything you need is there, even air conditioning. In the photo, the front panel is a bit tweaked, the installation is in progress:

At the same time, the control panel with the instruments is quite modern, with a large color display and beautiful (almost like Tesla's). It is worth driving:

This panel displays all the information on the car, and for each subsystem there is its own page. Its page about hydraulics, about ICE, about transmission, etc. But the panel is mostly informational and does not control anything vital — that is, its absence does not affect the functioning of the transmission. Unfortunately, no one agreed the digital exchange protocol with this panel in advance; it didn’t do a page with our drive for us. Therefore, we first decided that our drive would be “without windows, without doors” - two light bulbs to indicate accidents and that's enough.
However, the local adjuster (for which he was grateful to him) was provided with an exchange protocol with the panel in the form of a CAN parcel label, which he received right on the spot by a close analysis of the logs (or popular sniffing). Without thinking twice, we adjusted to this protocol and began sending the necessary parcels with our controller, after which the telemetry from our drive on the panel came to life and began to be displayed on similar fields from another electric transmission:

Not to say that there are a lot of things there, but at least the driver can see the currents, voltages and temperatures. It also displays the cruise control on-status, errors on the transducers, the status of the direction of travel selector, etc. The rest of the diagnostics is performed from the laptop of a setup man by a service program from the manufacturer of the transmission (that is, besides the electric drive itself, it was necessary to develop service software).
First start
After checking the supply of instrument power, checking the presence of all nodes in the CAN network and continuity of power cables, it is time to first turn on. The rear wheels of the truck are hung out, the engine is idling. All protection settings are reduced to “strafing”. Those. if at least something jumps somewhere, even if the current, even though the voltage is any telemetry, then everything turns off immediately.
In manual mode, from a laptop, we set a small generator excitation current and press the cherished “Start” button. The voltage on the DC bus slowly rises to 100V. Nothing banged? The protection is not struck? Control power bus insulation did not work? Doesn't it smell anything? Nobody shouts "cut down"? Is everything smooth in the logs? Good. You can raise a little higher, up to 400. This is how it looks in our telemetry logger (in online mode, graphics creep out to the right in real time):

Now we check every traction engine. We set a small frequency of rotation, again in manual mode, we also lower all protections to the very bottom, click "Start". This is how it looks outside:
Video of a rotating wheel
This is how it looks in the logs:
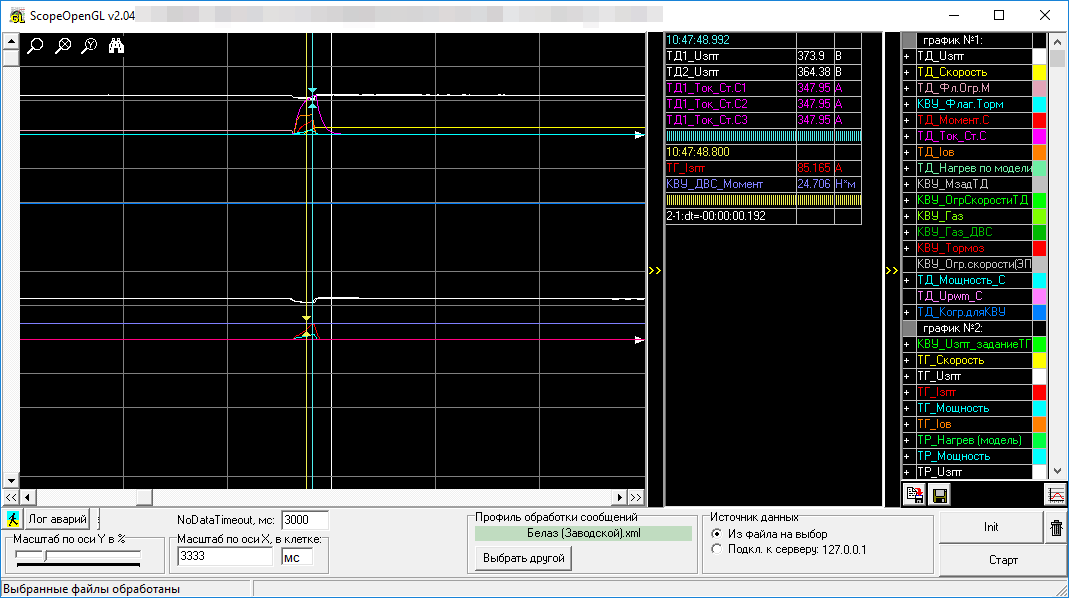
At the time of acceleration of the wheel, the voltage on the DC link of all devices (white) slightly lowered, the stator current of all the triads of the first engine (purple) increased, the excitation current (orange), the generator showed the DC bus current (red ), a small power of 43 kW (blue), and the rotational speed (yellow) rose to the target, 200 rpm, after which everything else fell to zero. Almost no energy is spent on spinning at idle, at the level of measurement error.
We repeat everything with the second engine - it works. Then we check all the same from the controls - from the gas pedal, brake. We accelerate and decelerate the engines faster, raise above the protection setting.
In the logs it looks like this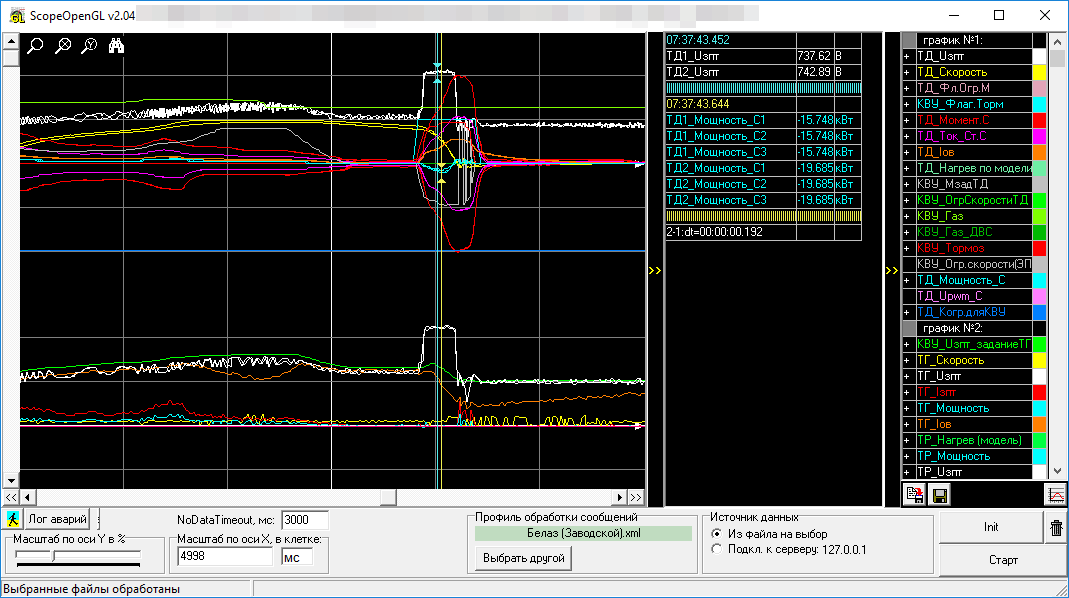
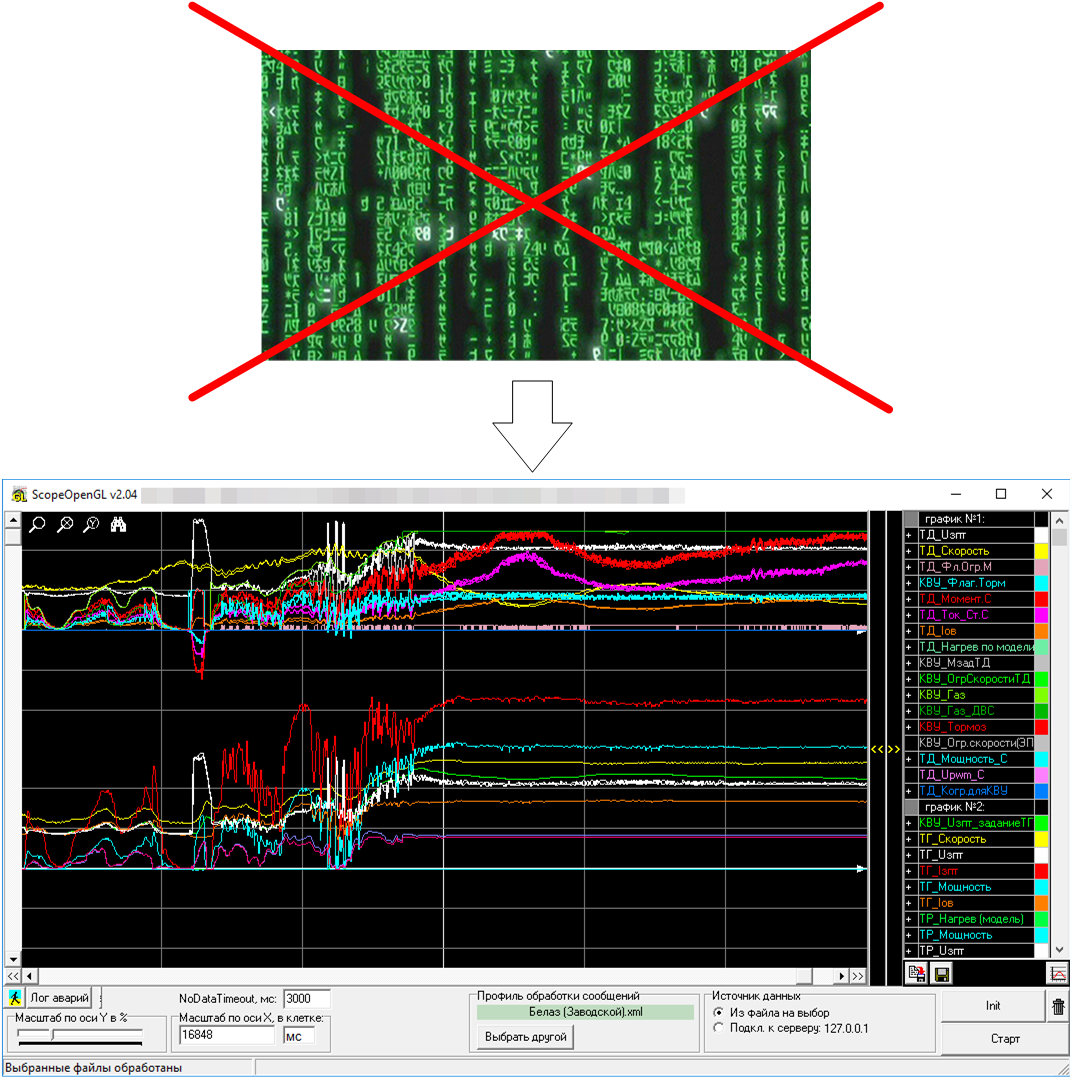
На самом деле наша программа просмотра логов рассчитана на интерактивную работу, а в статике, в виде скриншота, абсолютно неинформативна. При пользовании ей предполагается, что пользователь водит мышкой, ставя курсоры трассировки на интересующие места графика, и значения всех линий, попавших в вертикальное перекрестие курсора (стрелочки), отображаются в легенде. Если бы мы вывели значения всех тысяч графиков телеметрии сразу одной простыней, там никогда было бы не найти нужного. Поэтому не пытайтесь особо понять, что тут происходит – просто много красивых разноцветных линий, по которым ездит самосвал!
На самом деле наша программа просмотра логов рассчитана на интерактивную работу, а в статике, в виде скриншота, абсолютно неинформативна. При пользовании ей предполагается, что пользователь водит мышкой, ставя курсоры трассировки на интересующие места графика, и значения всех линий, попавших в вертикальное перекрестие курсора (стрелочки), отображаются в легенде. Если бы мы вывели значения всех тысяч графиков телеметрии сразу одной простыней, там никогда было бы не найти нужного. Поэтому не пытайтесь особо понять, что тут происходит – просто много красивых разноцветных линий, по которым ездит самосвал!
Unfortunately, in the workshop there is a weak exhaust, and the diesel is very bloody - during the test inclusions, he has smoked everything so that a clearly visible smoke appeared in the workshop and the head began to ache. We urgently deafen and open all the doors - a smoke break. However, everything has been checked and the dump truck can be put on wheels, maybe it will drive to the street by itself, and it will be possible to continue commissioning in the open air. In case of something, there is always something to roll back the dump truck - the operating organization always has such machines that can take home to repair:

"Pokatushki" and the first problems
So, the dump truck on wheels, and here it is, the long-awaited first exit from the shop under its own power:
But with the very first attempt to press the gas, the overcurrent protection on the generator DC bus tripped harder. The current exceeded protection 1500A (rated current for full power - 1100A). In this case, the car did not even go, the driver just sharply pressed the gas and everything turned off. What can be seen in the logs? And nothing:
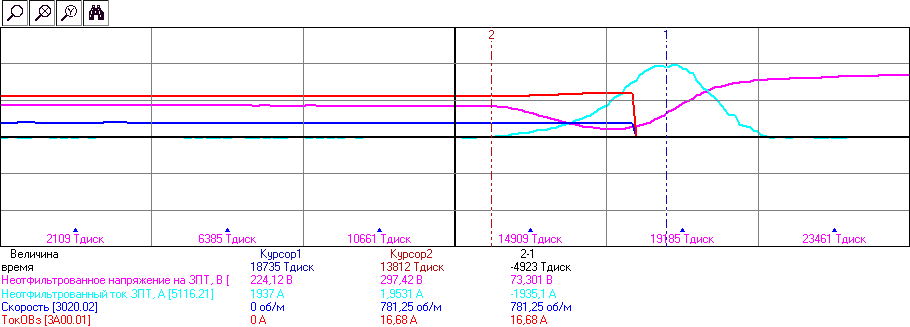
There was a voltage, then a small “poke” in the currents of the engines and the generator (only 30A per log), and then everything was zero. And where is the 1500A? The fact is that the regular sending of logs to the CAN network comes with a period of about 50-100ms, and the data displayed in them is averaged, with the averaging time being approximately the same 50ms. Therefore, yes, something happened there, in a very short period of time, but that is not visible from these logs. To clarify such a problem, you need to take an oscillogram using the means of the converter itself. We charge the oscilloscope of the generator controller with the voltage and current on the bus, the generator excitation current. We repeat the experience ... and opa:
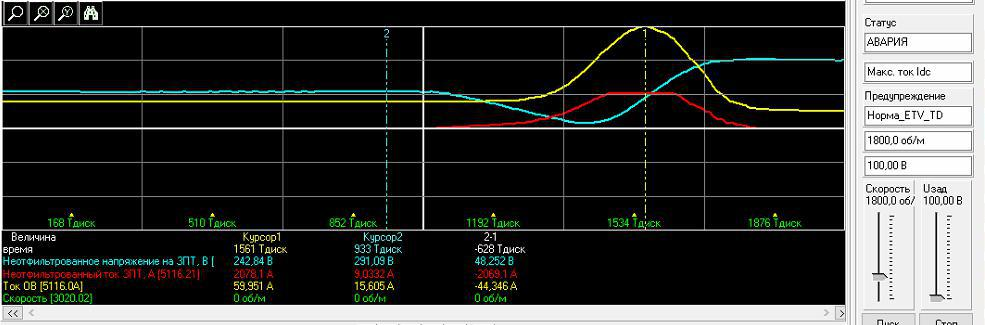
Here, red is the rectified current of the generator, and it reached 2000A, the measurement limit of the controller, and, judging by the shape of the curve, somewhere there was clearly above this shelf! Over two kilo amperes, Karl! And the voltage on the bus sags at this time from 250V to almost zero! And all this happens in 5ms and then everything is restored. At the same time, the excitation current shoots up ... Although the controller should limit it to 30A maximum, and then 60A. What's happening?!
Let's look at other quantities, this time setting the field current and the generator speed. Maybe the task of the excitation current due to a glitch flies up or the speed somehow jumps? But no, everything is stable:
The setting of the excitation current, red, is barely 17A, and is reset as soon as the 1500A protection is triggered. The rotational speed (blue) also behaves, it is stable as a shelf until the moment of an accident, and then its measurement stops when the converter is turned off. However, the currents still grow by themselves, the controller can not do anything! Okay. Let's see what traction motors are doing in the meantime. Maybe this is some kind of short circuit in the generator unit, but is everything OK on the engines? Yeah, that's it:
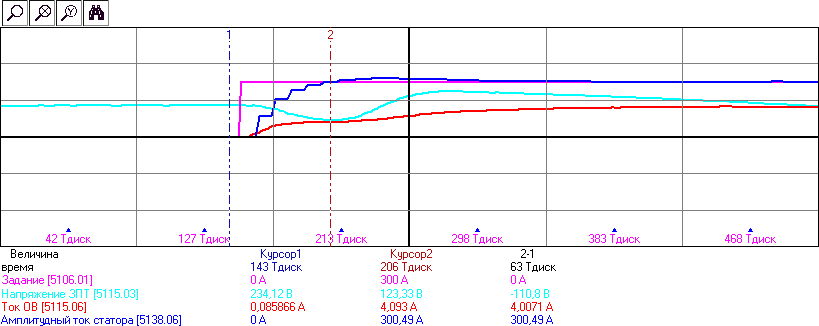
At the moment of a sudden start, the engines are trying to jump off the 300A phase current task (purple). The blue current of the stator (averaged over all triads of the machine) honestly shoots up on the task in 4 ms, and this is also accompanied by a synchronous voltage drop in the DC link (turquoise). Well, now everything is clear.
The motors drastically consume a lot of energy in a short time from the DC link. This energy, despite the fact that the engine is not spinning, goes to the "pumping" current inductors of the stator of the engine. Those. the energy from the capacitor of the DC bus goes into the inductance of the motor - from one energy storage to another
Peak power, as shown by calculations on a napkin, is about 400 kW! Since the voltage on the DC link when starting off is small, the energy in it is also small (
 ). This energy is not enough to “charge” the inductance of the motor windings (
). This energy is not enough to “charge” the inductance of the motor windings ( ), so the voltage begins to fall sharply with increasing current. Because of this, energy begins to be consumed from the generator, and everything is simple - the lower the bus voltage, the more it gives current through the rectifier. Only now, because of the inertia of the synchronous machine, it gives a current with a delay; it cannot start producing power of 400 kW as quickly as the engines need. He needs more time for the current to increase in his inductances. And traction engines quickly eat up the voltage in the tire to almost zero, and in response to this scum, after a couple of milliseconds, the generator responds with kiloampere currents!
), so the voltage begins to fall sharply with increasing current. Because of this, energy begins to be consumed from the generator, and everything is simple - the lower the bus voltage, the more it gives current through the rectifier. Only now, because of the inertia of the synchronous machine, it gives a current with a delay; it cannot start producing power of 400 kW as quickly as the engines need. He needs more time for the current to increase in his inductances. And traction engines quickly eat up the voltage in the tire to almost zero, and in response to this scum, after a couple of milliseconds, the generator responds with kiloampere currents!What to do? It's simple, no one needs for 4ms to respond to pressing the gas pedal. It is necessary to enter the intensity adjuster in the software of the motor converter controller, i.e. smoothly build up the current task, for, say, 50ms. This will not affect the responsiveness of the machine, but it will exclude a sharp surge of power to the generator so that it has time to push the current. Made, asked, works!
Go! But left not far. As the acceleration dynamics increased, protection began to work again. Now, not when starting off, but at 15 km / h. Now the oscillogram of currents and voltages on the generator looked like this:

Explicit oscillatory buildup! The current and voltage of the DC bus begin to swing out of phase, increasing and increasing the amplitude. 70Hz sine at the DC bus, resonance, however! Just what with what?
I would love to tell you what happened this time with the firmware of what and where we eliminated this buildup, but the article is not about that. Rather, not only about it, but also about a lot of other things. Only typical examples of problems are given, because they crawled out and crawled out, and we ruled and corrected the software, the coefficients and the logic of the equipment operation, until in the end everything didn’t go as it should - everything couldn’t be described! Such commissioning with toy modes of operation of the dump truck went on for days, revealing such problems, which a priori, to a real object, it was impossible to conceive or model.
All this time, while the programmers were engaged in a fierce hunt for unknown oscillations and other devilry, the machine outwardly drove sadly in circles in front of the gates of the workshop, something like this:
We need to go deeper
When all the problems of the first bastion were more or less debugged, and the defenses stopped falling every 100 meters, it was time for the first move to the cut. This is also a separate procedure, it is necessary to write out applications for leaving the car, for some reason, it is necessary to go with an escort car, arrange time, etc. But, nevertheless, we are in a career. That is, in section. We are waiting for loading in the queue on the excavator:
At first, we were asked to load us not to the top, but half, on trial. They asked for half, but we felt more sensibly piled on sensations! Well what to do, let's go, the first time with a payload! Video from the inside (carefully, emotional expressions, look in the headphones!):
In the log, the ride looks even more interesting (of course, for those who can see the matrix):
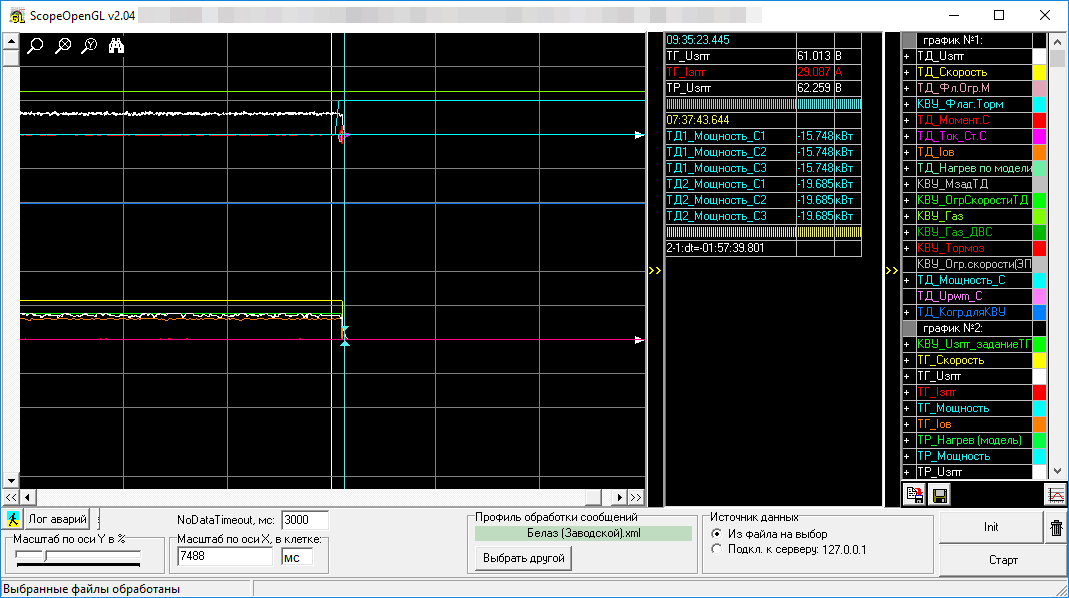
The picture is exactly the place with the overcoming of the slide from the video. At first, vibrations are visible, this car jumps on its tires along a rough road, the driver’s foot sets the same “jumping” gas, and the transmission works out. Then the hill begins. The yellow graph of the rotational speed of the traction motors sags up to 600 rpm, which corresponds to 10 km / h. At the same time, judging by the purple current graph, only half of the maximum flows in the phases, i.e. the engines have a twofold reserve for the moment. Faster, the car does not travel simply because there is not enough diesel power for more - the blue graph on the second axis went to the “shelf” of 770kW and kept constant (together with the diesel engine speed) regardless of the changing speed of the car. Those. Here, electric transmission completely transforms the full power of a diesel engine (minus efficiency) into a mass uphill lift, not resting on any of their limitations. It works as if always a correctly selected and always optimal mechanical transmission.
But, we digress. We are going! And now it's time to pour the payload. This is what the blade looks like, and again we wait in the queue:
In this way, they form a quarry, dumping waste rock into the right places.
Then we went downstairs again, now we were fully loaded, we went more, and more, and more ... The car began to gradually get involved in the work. On the way, of course, the protections went off, I had to hunt again with oscillograms for reasons, but over time the protections worked less and less, and the car drove more and more without shutdowns. Then we began to give the car to the night shift (without a programmer in the cockpit). In the morning, logs were downloaded from an industrial SD card in a top-level controller, studying places of interest and interrogating driver complaints.
Wishlist
And then ... Then all sorts of unscheduled improvements to the software began, so to speak. Something that does not affect the main functionality, something that was not in the TK, but as it turned out that "all other dump trucks have and it is very convenient." For example, it turned out that all new cars had a recoil system. Approximately as in cars, but with some "career" nuances. In general, it was necessary to make it so that if the direction selector is facing forward, then the car could only roll forward, and it would be necessary to go backward with force. Those. so that it was possible to completely release the gas when climbing a slope, the car would smoothly stop and not roll back. And if you need to go ahead, the driver would gas the car and the car without going back and jerking up. And all the same with the selector back - you can not roll forward. And in neutral, recoil must be turned off.
But no one said in advance that this should be done! Yes, it’s obvious with my own eyes at a career that it’s really inconvenient to operate machines without this mode. But here's the problem - it’s so simple to do with a mechanical brake, in passenger cars at zero speed it is clamped with valves of the ABS unit (or what’s there?) And that's it. And you do not need to spend any energy, nor do a balancing act. At BelAZ, all systems are separated, and there are three pedals - gas, mechanical brake and electric brake (where the clutch is usually). So: mechanical brakes are controlled only directly from their pedals without any electronics. Therefore, if you make a drawback on this design of dump trucks, then only by means of braking by a traction motor.
And to keep the electric motor in one position with the load in the form of a dump truck standing on a slope is not so easy! How to explain it ... it's like keeping a regular car with a manual gearbox on a slope, playing with gas and clutch. Depending on the position of the machine, it is necessary to yield a pull or to drop it. In this case, the position sensor of the machine in our case is the position sensor of the rotor of the engine. But this sensor is very rough, with a small number of tags per revolution. Those. if you do it in a simple way, “the faster we drive back, the more we push forward”, then the car either treacherously crawled off the slope little by little, or swayed back and forth. Imagine, you got up at a traffic light, and the car crawls back and forth two meters, yielding a gas, a brake, and a nodding suspension back and forth ... The task ultimately reduces to the servo task,article about servo ), but only in the size of BelAZ and on the position sensor with very low resolution.
In general, we played enough then with the anti-rollback algorithms, we had to use the most cunning PID controllers with filters that we were able to think up. But the nature of the behavior of the dump truck is still changing dramatically with the load / without load! But to adjust "like everyone else" seemed to work, the drivers were satisfied. Here is one of the videos, how we debugged the recoil with the cargo:
The same, but from the inside:
Another interesting system is cruise control. Local call it stabilization speed. And if in passenger cars it is needed when traveling “on long-range”, so that the leg does not get tired to keep the gas, here it is for a completely different reason. Even in summer, quarries are usually quite slippery, the roads are earthen, after a rain they wash away, it turns out to be slush. Well, in the winter in the ice and even more so. And all these multi-ton dump trucks on these roads are quite successfully stalled (we have no video, but on YouTube there are many examples: one , two ).
According to drivers, the safest way to drive is for the wheels to rotate at a given fixed speed, even though there is a descent, though an ascent. This is exactly what the speed stabilization function provides. Its task is to keep the task very rigidly, not reacting to local elevation changes. At the same time, it should keep the speed playing with both gas and brake, depending on where and how the car goes.
In words, it sounds cool, but in fact there is the usual PID speed controller of the machine and that's it. Although I had to poopaskat and ponastraivat too. Yes, and another difference from conventional cars - if you press on the gas or on the brake, the cruise control mode does not turn off here, but simply increases or decreases the speed reference. Those. the driver can ride in this mode all the time, but the pedals change their role and instead of the level of thrust they now regulate the speed reference.
In addition to stabilizing the speed of the car as a whole, it is also necessary to align the rotational frequencies on the wheels (on the rear, of course, there is no information from the front). But here the alignment is not rigid, since the wheels can (and should) spin at different speeds in the turn. Therefore, up to a certain delta of rotational frequencies, the drive does nothing, and with a larger difference it begins to redistribute the moment on the wheels so as to twist the lagging and suspend the evader. But, in general, there is also no rocket-principle here, and the proportional regulator with a dead zone copes. At the same time, with one regulator you can kill two birds with one stone: depending on whether we are pulling or pushing, it turns out that the anti-slip and anti-blocking system is at once. Not quite honest systems, of course, because two rear wheels can slip at once, and block together, but individually each is not. Although on future cars we were promised to install front-wheel speed sensors, then it will be possible to do with them for real, without blocking.
our team
How many people did all this? And how much was commissioned? How was the interaction built? These are also interesting questions. If you count on your fingers, then the construction of the power cabinet involved three people, writing three more software, a couple of controllers bred, electric machines still constructed an average of three and one supercomputer. Still need to count a few workers who were engaged in a complete set, documentation and organizational things. And this is only the people directly involved in the project who have been doing just that and nothing more. And then there are workers in factories that have sharpened this equipment, cut it, wound it, assembled it, checked it, transported it, and so on. In general, the cooperation was great, many firms and factories in different parts of the country.
The commissioning at the facility was first five, when active assembly and installation of equipment, cabling, etc., was done, but then there were only two left for pokatushki and debugging: one designer of the power cabinet and one programmer. Well, this is not taking into account the local drivers, servicemen and workers who helped in case of anything.
However, even though there were two people, virtually the whole team was with them. We have this practice - a separate chat is created for each project (in a disgraced messenger), and everything that happens is covered there. Dozens of waveforms, photographs of loose wires, log files and appeals for help are published there every day. Everything is always in touch and solve emerging issues. We even bought a GSM antenna with a modem for this, so that the connection was even at the very bottom of the pit (cut).
Also, remote connection (remote desktop) is often practiced when a particular programmer needs to do something (we have a term for such an oscillogram removal session) or sew controllers in his part of responsibility. And it also happens that in the car it shakes a lot, then the one who connects on the remote control does the work itself, and the one who sits in the cab just visually controls the situation, monitors the connection and commands where to go.
There is also the mission of the responsible log viewer. Let's say the car made another walk with the load, visually everything was fine, CAN logs the trip log. It is necessary to open and view it, and usually there are many very interesting nuances in it, although no one noticed anything on the go. Right there in the office there is editing the software, pushing, on the other side of the Internet it is pulling and stitching into the car.
You may be surprised, but the author of this article has never seen a BelAZ live. Yes, in this project I am the same matrix operator and remote logger. And this article was written without a single consultation with those who "were there." Just because we all, who are in the chat, already know everything. This is the kind of information transfer we have when working with a project.
Moreover, all tests of electric motors at the factory (last article) were carried out without the presence of programmers. But be led by them. By the distance. From those who were sent on the spot on tests, only the unfortunate designer of the power cabinets (not counting the factory workers), who needed to take oscillograms with a physical oscilloscope, control temperatures and connect wires, was sitting. Such arrogance on the part of programmers has become possible only thanks to many years of investment in its debugging software and methodology, which was discussed in detail here .
By the way, for this reason, at the stage of discussing a new project with the customer, we immediately find out whether there is an Internet connection, mobile communication at the facility, where it is possible to provide them in the event of a lack of equipment. If it turns out that there is nothing, we say that then commissioning will go three times longer. Usually, this very well stimulates the search and connection of an access point that is left behind by us for a Wi-Fi access point or the organization of permission to bring a “3G-modem prohibited for ordinary mortals” to an object at the time of commissioning. But, of course, there are places where not only the Internet, but also the household outlet is difficult to find. By the way, about the sockets - at the time of commissioning in the dump truck, we installed an inverter 24-220V (from a regular car shop) to charge laptops and phones in order to work quietly without interruption.
Conclusion
Although now the machine has already become an adult and goes into the cut on its own, we don’t forget about it - the GSM service antenna was left to the local service engineers, and if that happens, we connect remotely and diagnose what’s wrong. You need to go to the place only if something irreparable breaks down. Breakdowns such as a loose wire or a failed pump are repaired by local staff, and our business is to connect and say exactly where the problem is and where to see it.
Presumably, this is the final article on this project. If in the comments there are suggestions about what to say, what will not fit into the format of the response comment, then we will think about writing a continuation.
A series of articles turned out, of course, one-sided - a kind of view of the project by programmers. I am sure that all other project participants, machine and cabinet designers, installers and workers would also have a lot to tell from their point of view. Maybe sometime they will write something similar.
Also, the article does not even look closely at all the control algorithms for the dump truck itself, because for this, it’s not the article that should be written, but the dissertation. How the balance of power between all devices is ensured, what law is used to control the generator, how the diesel rotational speed is set, how the operator’s pedals are processed and converted to the torque reference, and much, much more. That is, the algorithms, of course, are much more complicated than
if (газ>0)
задание_момента = газ;
if (тормоз>0)
задание_момента = -тормоз;
And in them, of course, there are also a bunch of different engineering solutions: some elegant solutions, some clumsy, some unobvious, some very trivial ones. But all of these algorithms, with time and experience, would be reached by any engineer one way or another when you need to complete the task. Therefore, I decided not to dive into the boring technical details of the implementation, but to show how this project went occasionally, with pictures, YouTube and lyrical digressions. I hope it was interesting.
As usual, the advertisement of the native institute
This project was carried out for the most part by graduates of NRU MEI. If you are confronted with the question “where to study further” and it is interesting for you to turn electric motors, start BelAZ trucks, and also want to learn how to program a vector control system, then welcome to
spoiler
Кафедра Автоматизированного электропривода (АЭП) НИУ МЭИ продолжает набор в магистратуру по направлению 13.04.02 «Электроэнергетика и электротехника», программа подготовки – «Электропривод и автоматика».
В магистратуру по данной специальности можно поступать на конкурсной основе на бюджетную форму обучения или на платной основе. Срок окончания приема документов в магистратуру на бюджетную форму обучения – 17 августа 2018г.
Вступительные экзамены будут проводиться 11 августа и 20 августа (консультации 10 и 17 августа, соответственно). Подробности на сайте приёмной комиссии. Примеры экзаменационных заданий можно так же найти в специальном разделе сайта приёмной комиссии. Поступающим, нуждающимся в общежитии, предоставляет общежитие в пределах выделенного числа мест при поступлении на места в рамках контрольных цифр приёма очной формы обучения и на договорные места очной формы обучения.
Также приглашаем выпускников школ поступать в бакалавриат по направлению 13.03.02 «Электроэнергетика и электротехника» факультета ИЭТ МЭИ. Срок окончания приема документов в бакалавриат на бюджетную форму обучения – 26 июля 2018г.
Документы подаются по адресу г. Москва, ул. Красноказарменная, д.17.
Кафедра автоматизированного электропривода НИУ «МЭИ» является ведущей кафедрой по данной специальности в России, имеет более 20 млн. руб. ежегодного объема научно-исследовательских работ, публикует более 20 статей в год в изданиях, индексируемых наукометрическими базами данных Web of Science и Scopus, на кафедре преподают сотрудники ООО «НПФ «ВЕКТОР» и ООО «НПП «ЦИКЛ+» — ведущих предприятий в области разработки электроприводов и электрических трансмиссий в России.
В магистратуру по данной специальности можно поступать на конкурсной основе на бюджетную форму обучения или на платной основе. Срок окончания приема документов в магистратуру на бюджетную форму обучения – 17 августа 2018г.
Вступительные экзамены будут проводиться 11 августа и 20 августа (консультации 10 и 17 августа, соответственно). Подробности на сайте приёмной комиссии. Примеры экзаменационных заданий можно так же найти в специальном разделе сайта приёмной комиссии. Поступающим, нуждающимся в общежитии, предоставляет общежитие в пределах выделенного числа мест при поступлении на места в рамках контрольных цифр приёма очной формы обучения и на договорные места очной формы обучения.
Также приглашаем выпускников школ поступать в бакалавриат по направлению 13.03.02 «Электроэнергетика и электротехника» факультета ИЭТ МЭИ. Срок окончания приема документов в бакалавриат на бюджетную форму обучения – 26 июля 2018г.
Документы подаются по адресу г. Москва, ул. Красноказарменная, д.17.
Кафедра автоматизированного электропривода НИУ «МЭИ» является ведущей кафедрой по данной специальности в России, имеет более 20 млн. руб. ежегодного объема научно-исследовательских работ, публикует более 20 статей в год в изданиях, индексируемых наукометрическими базами данных Web of Science и Scopus, на кафедре преподают сотрудники ООО «НПФ «ВЕКТОР» и ООО «НПП «ЦИКЛ+» — ведущих предприятий в области разработки электроприводов и электрических трансмиссий в России.
And finally, the mystery:

Find on this photo a GSM antenna and lights.
Otgadka
Ну, антенну-то все нашли, ромбик над кабиной, а вот то что многие могли принять за большие круглые фары – на самом деле воздушные фильтры. А фары на самом деле под ними, маленькие квадратики.