How Habr helps to fulfill dreams and collect balls
You probably do not know how much I appreciate Habr . This is not just a site with relevant information. This is a community of people networking. In this post, a short story about how Habr fulfills dreams . How in 6 months you can make an MVP from an idea, find investors and create something new. The post that you should not be afraid to implement ideas, do not leave them gathering dust until better times. Under the cut, there are a lot of photos from the pitch, from a trip to the Dominican Republic, metamorphoses of the robot due to habranetorking.
Perhaps our story motivates you to realize your ideas that have long been hatched, but did not dare to turn into life. To do this, the article contacts investment funds in the Russian Federation .
In golf there is a driving range, this is a training field for practicing long and medium shots. Up to 20,000 goals may appear on it per day. These balls need to be collected somehow. Usually, special equipment attached to the car is used for collection. These are personnel costs, maintenance of equipment, damage to balls by equipment, damage to the field.
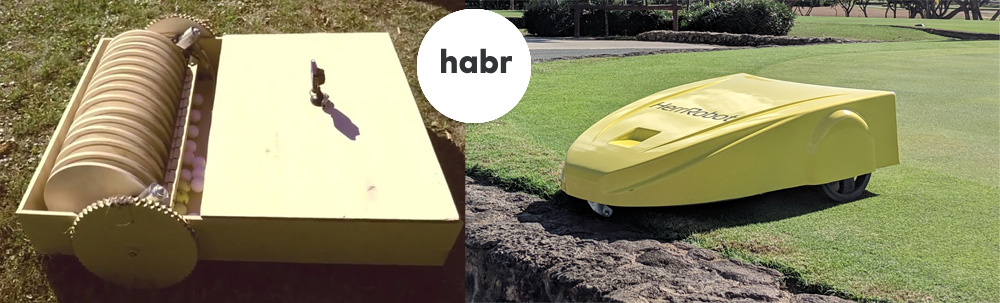
In the summer of 2018, my friend Michael Vikrent, a golf teacher in Germany, spoke about the pain of golf club administrators, and I found a solution in the form of a robot. I assembled the first prototype from plywood and wrote an article about it on habr.com and got a wide response. Now, we are already 4 people in the team, professionals with experience in global companies.
The main message of the post is that you may not have everything perfect, it is important to act. If I would keep my idea, protect and cherish, nothing would come of it. I made the first option (very far from ideal) and talked about it. This helped to find like-minded people with whom, I hope, we will remain good friends. Below is a photo of our Moscow team building!

Further on the case, mechanics, control board and software, I would like to show what was in the beginning and how it looks now. Progress is especially noticeable due to the low base effect.
The first version of the corps was terrible and shouted that we needed a man to solve this problem. Habr helped to find such a person. Now the case is being designed by NikitaKhvoryk .
The first option

A version of fiberglass, to assess the dimensions of the

vacuum forming The

current option with painting and reinforcing fiberglass.

Progress is visible to the naked eye, and this is all the result of networking.
The lower part of the corus The

lower part of the casing, to facilitate the manufacture of the structure, we make of composite material and mill it. In each iteration, we add new parts and holes to the body, which in the previous one were modified by hands.

Everything was suitable for testing the idea, even noname ali engines and printed gears.

Of course, all this had to be replaced for further development, even the engine change and the printing of chevron gears did not save. This drive option is not final, now we are waiting for a timing belt and pulleys to facilitate the design.

First there was a word, then a breadboard. What does the interweaving of wires look like? That's right, the cradle for the cat.
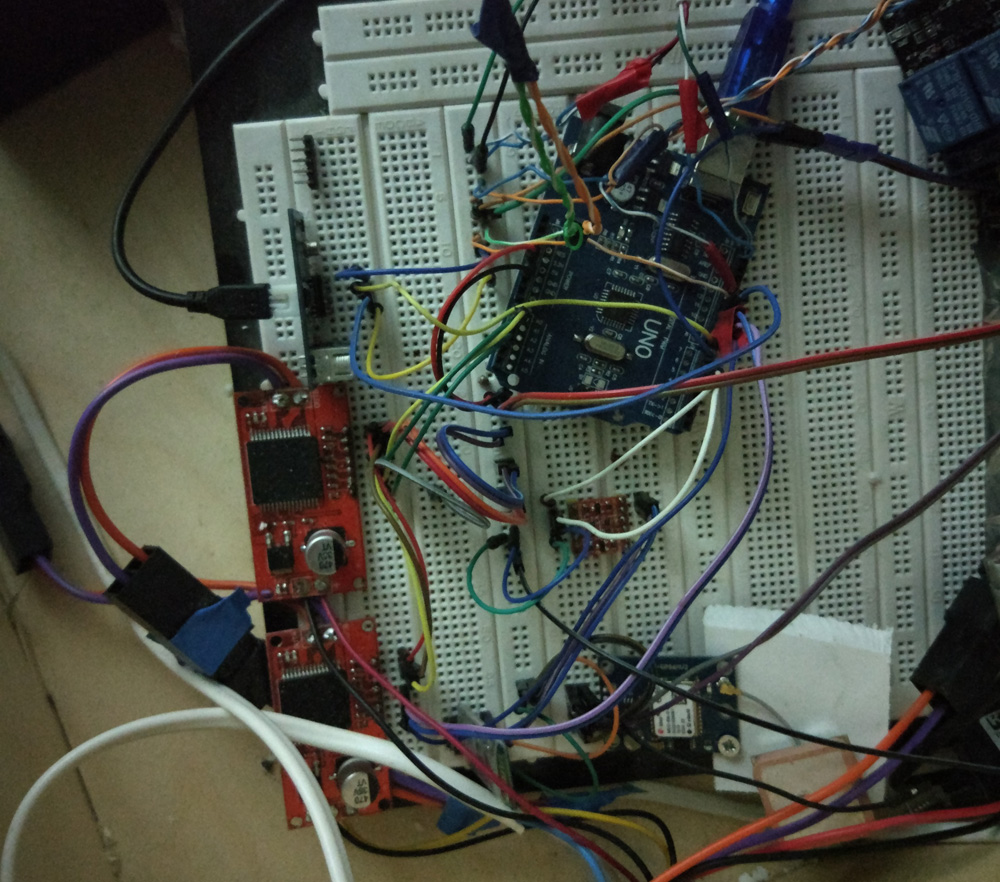
This is what the first compact breadboard looked like.

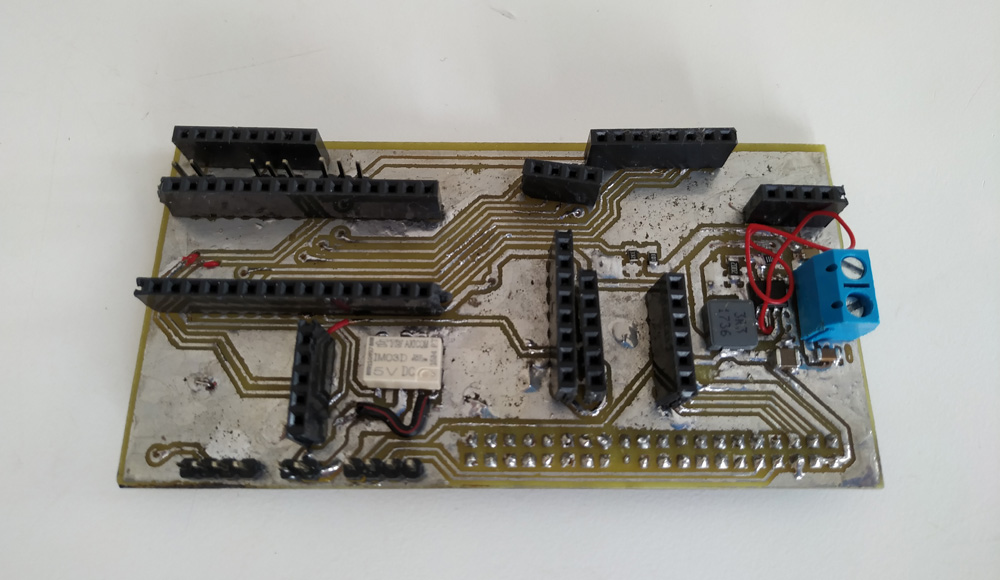
Then the user SkyserR got down to business . He designed and assembled a module connection board for the raspberry pi version.
Board version from Rezonit The

version with Ardupilot is developed by Vladimir Goncharov Shadow_ru . You can read about it here .
Thank you for your help and advice Process0169 , Trif , tersuren , vasimv , vovaekb90 , r00mka, Vyacheslav Soldatov, Levon Zakaryan, Sergey Pomazkin, Vladi Kuban, Karen Musaelyan, Alexei Platonov. If you want to help - please write to me in the LAN or VK , FB .
Initially, all the software was self-written. Python scripts and Arduino sketches. But when tired of cycling switched to Ardupilot and ROS.
We have MVP and now we are simultaneously developing hardware and software part. We use opensource solutions and write our own software. We have partner partners in Russia and China who supply us with components.
In October, it became clear that this project could be turned into a commercial one. We submitted an application to the Accelerator from Sberbank and 500 Startups, but received an answer about the discrepancy to the investment focus. In general, they needed projects for the Preseed stage, which we did not fit at that time. Then the application for the "Grant Competition EXPO 2020 Dubai", we did not even get a response from them. We have submitted an application to the Foundation for the Promotion of the Development of Small Forms of Enterprises (Bortnik Fund) for the Start-1 program, we are waiting for an answer.

We took part in a pitch session, talked about our project. Contacts were received by 3 investment funds and two independent investors. Participation is free, events are ongoing. I highly recommend it, it allows you to find investors, prepare your presentation, find weaknesses in the project. It was a meeting with one of the funds from the event that made it possible to receive the first offer.
After the event, we sent a presentation of the project to the Russian funds. This allowed us to get an invitation to a second meeting and start negotiations.
Also a good option is to contact an investor who has a similar project in his portfolio or invests in this topic. I used the site rb.ru/company/?niche=119 and chose robotics startups. He analyzed who invested in them and sent them a presentation. This method is suitable for the first touch. It is not a fact that someone takes such emails seriously, but it significantly increases the base of contacts. How to use them is up to you.
If you have experience presenting a project in the USA and want to help us with this, write to me on social networks.
“Esto es un robot que collecta las bolas de golf” - I said, because I don’t know how Spanish would be “No, this is not an electro-sheep”, I think it would sound approximately the same for a senior from sunny and fraternal Haiti.

Habroyzer tersuren invited us to the Dominican Republic. So we got the opportunity to test our robot in the winter and not wait until May to work out the algorithms for constructing the trajectory by GPS. At the same time, the tests themselves took place in one of the best golf clubs in the world. We shot a video of the robot working in a golf club, which was very helpful in communicating with investors and demonstrating the robot's capabilities.
vasimv lives and works in the Dominican Republic on a robotic lawnmower. Given the permanent posts in the emigration top, if you are engaged in ROS, robotics or electronics, while thinking about moving your place of residence for a long time, write to tersuren .

Flying with a robot is a whole story. In addition to the robot 1100 * 800 * 300, it was also necessary to somehow transport spare parts, personal belongings. In general, I took a laptop and batteries in a backpack. And personal belongings, gifts from Russia, spare engines, wheels, wires, etc. placed right in the robot, in the ball compartment. You should see the surprised faces of the airport and customs. The robot was taken there several times in the scanner. Ended up in both cases with the question: Is that what? Given the huge inscription HERROBOT on board, it seemed to me that there would be no questions. And so, after all, it’s clear!
Not without Epic-fail. We rushed to order the board in a resonant manner, so one of the contacts turned out to be confused. He was soldered on snot. Due to humidity, the driver on the wiring worked through time. There could be no question of any testing of algorithms with low-level problems. "Soma grams and no dramas." Then we switched to testing versions on Beaglebone and Ardupilot.
I, overcoming the heat, and Shadow_ruovercoming the cold with a 7-hour difference due to time zones, urgent changes were introduced in the Ardupilot to make it work in new conditions. ESCs, replaced by burned ones, should have been brought up from the online store the day before departure from Russia, but not fate. The existing controllers understood PWM, and beaglebone stubbornly issued only the frequency for the serv. In the end, I had to make a bridge from Arduino. Everything was done in a hurry, but suddenly someone needs a code.
Now there is only one competitor in the world and it costs $ 15,000. In the world of 34,000 golf clubs, everyone spends at least $ 1,500 / mass on collecting balls. This is a market of more than $ 600M / year. Our minimum program is the sale and subsequent maintenance of 1000 robots. Even when sold at a price 40% lower than the competitor, this is about $ 8M in revenue.
We have a preliminary agreement with golf clubs interested in testing the robot on their field in Germany, Australia, New Zealand, Sweden and the Dominican Republic. And all this thanks to Habr.
Do you know how to fulfill your dreams and bring your ideas to life? Calm Just close your eyes and enjoy the moment. No Eckhardt Tolle will tell you about the power of the moment, if you scroll through the same thoughts and they do not give you rest. You add details to your project, but don't start doing it. You forget for a while, and then what kind of trigger again causes images of the idea for the dream project. This is exactly what is the reason to start doing. Do not wait for the perfect moment, perfect moment now!

Is such a robot necessary at all? Golf is not so widespread in Russia so far, but we turned to industry experts to find out their opinion. All of them agree that this robot is necessary.


We turned to the leaders of the robotics market in Russia to find out their opinion on service robots for solving routine tasks. This is undoubtedly a trend that is difficult to argue with.

We will refine and promote our robot, because we cannot but do this. To speed up, we need your help and support!
At the beginning of March we have another pitch planned. Why, if there is already an offer? I don’t know yet, we go as Siddhartha, the path finds us. In March, we need to finalize all the algorithms for full work and start testing golf courses in the Russian Federation in April. In June, participation in the exhibition, publication in European golf publications. Over the summer of 2019, we must make 25 robots and start tests in Germany and the Dominican Republic. In the fall, start selling as a service. And in 2020, enter the US market.
In 2020, release a model of a lawn mower that works on the same algorithm for constructing a trajectory to solve all problems in the driving range.
These are simple milestone, thank you for your support.
Our posts:
PS: This robot would not have been if not for Habr .
Perhaps our story motivates you to realize your ideas that have long been hatched, but did not dare to turn into life. To do this, the article contacts investment funds in the Russian Federation .
In golf there is a driving range, this is a training field for practicing long and medium shots. Up to 20,000 goals may appear on it per day. These balls need to be collected somehow. Usually, special equipment attached to the car is used for collection. These are personnel costs, maintenance of equipment, damage to balls by equipment, damage to the field.
In the summer of 2018, my friend Michael Vikrent, a golf teacher in Germany, spoke about the pain of golf club administrators, and I found a solution in the form of a robot. I assembled the first prototype from plywood and wrote an article about it on habr.com and got a wide response. Now, we are already 4 people in the team, professionals with experience in global companies.
The main message of the post is that you may not have everything perfect, it is important to act. If I would keep my idea, protect and cherish, nothing would come of it. I made the first option (very far from ideal) and talked about it. This helped to find like-minded people with whom, I hope, we will remain good friends. Below is a photo of our Moscow team building!
Further on the case, mechanics, control board and software, I would like to show what was in the beginning and how it looks now. Progress is especially noticeable due to the low base effect.
Housing
The first version of the corps was terrible and shouted that we needed a man to solve this problem. Habr helped to find such a person. Now the case is being designed by NikitaKhvoryk .
The first option
A version of fiberglass, to assess the dimensions of the
vacuum forming The
current option with painting and reinforcing fiberglass.
Progress is visible to the naked eye, and this is all the result of networking.
The lower part of the corus The
lower part of the casing, to facilitate the manufacture of the structure, we make of composite material and mill it. In each iteration, we add new parts and holes to the body, which in the previous one were modified by hands.
Mechanics
Everything was suitable for testing the idea, even noname ali engines and printed gears.
Of course, all this had to be replaced for further development, even the engine change and the printing of chevron gears did not save. This drive option is not final, now we are waiting for a timing belt and pulleys to facilitate the design.
Pay
First there was a word, then a breadboard. What does the interweaving of wires look like? That's right, the cradle for the cat.
This is what the first compact breadboard looked like.
Then the user SkyserR got down to business . He designed and assembled a module connection board for the raspberry pi version.
Board version from Rezonit The
version with Ardupilot is developed by Vladimir Goncharov Shadow_ru . You can read about it here .
Thank you for your help and advice Process0169 , Trif , tersuren , vasimv , vovaekb90 , r00mka, Vyacheslav Soldatov, Levon Zakaryan, Sergey Pomazkin, Vladi Kuban, Karen Musaelyan, Alexei Platonov. If you want to help - please write to me in the LAN or VK , FB .
BY
Initially, all the software was self-written. Python scripts and Arduino sketches. But when tired of cycling switched to Ardupilot and ROS.
We have MVP and now we are simultaneously developing hardware and software part. We use opensource solutions and write our own software. We have partner partners in Russia and China who supply us with components.
Transforming an Experiment into a Product from a Hobby
In October, it became clear that this project could be turned into a commercial one. We submitted an application to the Accelerator from Sberbank and 500 Startups, but received an answer about the discrepancy to the investment focus. In general, they needed projects for the Preseed stage, which we did not fit at that time. Then the application for the "Grant Competition EXPO 2020 Dubai", we did not even get a response from them. We have submitted an application to the Foundation for the Promotion of the Development of Small Forms of Enterprises (Bortnik Fund) for the Start-1 program, we are waiting for an answer.
Speech at the "Reconnaissance Fight" event
We took part in a pitch session, talked about our project. Contacts were received by 3 investment funds and two independent investors. Participation is free, events are ongoing. I highly recommend it, it allows you to find investors, prepare your presentation, find weaknesses in the project. It was a meeting with one of the funds from the event that made it possible to receive the first offer.
A photo. Intelligence Combat



After the event, we sent a presentation of the project to the Russian funds. This allowed us to get an invitation to a second meeting and start negotiations.
Contacts of funds in the Russian Federation
| No. | Name / Name | Contacts | The contact person |
| 1 | FizTech Ventures LLC - Phystech Ventures | http://phystechventures.com startup@phystechventures.com | |
| 2 | Bright Capital Management LLC | businessplan@bright-capital.com +7 (495) 989-85-40 | |
| 3 | LLC Prime Group | www.primegroup.ru adanilenko@primegroup.ru +7 (499) 579-77-01 | Danilenko Anton Borisovich |
| 4 | CJSC RB Capital | +7 (495) 726-59-17 | |
| 5 | LLC PF Capital | ventures@pf-cap.com | |
| 6 | Kovalev Dmitry Vladimirovich | dimanyes@gmail.com | |
| 7 | Pshinnik Kirill Vadimovich | kirill.pshinnik@gmail.com | |
| 8 | Lutz Igor Rudolfovich | igor@theuntitled.net | |
| 9 | Chuchkevich Mikhail Mikhailovich | 5024405@gmail.com | |
| 10 | Rumyantsev Alexander | 3333626@gmail.com | |
| eleven | Kama Invest Management LLC - KamaFlow | +7 (495) 532-68-32 | Borisov Eugene |
| 12 | LLC "Investment Agency Height" | http://invest.theterritory.ru/ +7 (495) 134-19-90 | Morozov Alexander |
| thirteen | LLC Primer Capital | +7 (499) 755-56-44 | |
| 14 | Ryaben'kyi Igor Arkadevich | igor@altair.vc | |
| fifteen | Softline International CJSC | +7 (495) 232-00-23 | |
| 16 | LLC "Management Company IP" | www.sciencepark.ru +7 (495) 930-84-54 | Vasily Petrechenko |
| 17 | Starta capital | +7 (495) 761-13-49 | Sergey Vasiliev |
| 18 | Kovsharov Pavel Alexandrovich | pkovsharov@mail.ru | |
| 19 | Evseenkov Oleg Vladimirovich | oleg@evseenkov.ru | |
| 20 | Impulse LLC | +7 (499) 702-36-72 | Vadim Dyakov |
| 21 | ife.Sreda VC | http://sreda.vc/ info@lifesreda.ru | Elena Kondrashkina |
| 22 | Add Venture III | max@addventure.to +7 (926) 339-82-50 | Maxim Medvedev |
| 23 | Cloud4Auto Ventures | Bk@cloud4auto.com | Innocent Belotsky |
| 24 | LLC "Biofund RVC" | http://www.rvc.ru/investments/affiliated_funds/biofund/ info@rvcbio.ru +7 (495) 789-69-47 (ext. 114) | Ekaterina Ryzhova |
| 25 | Яровой Богдан Витальевич | http://smarthub.ru/ olga@smarthub.ru; bogdan@smarthub.ru | |
| 26 | Бородич Александр | Елена Привалова | |
| 27 | Княгинин Дмитрий Валентинович | ||
| 28 | Нахапетян Гор Борисович | gor@skolkovo.ru | |
| 29 | ООО «ФМФ Инвестиции» | +7 (916) 854 46 39 | Андрей Яшунский |
| 30 | АТИ Глобал Инк. | http://northenergyventures.com/ru + 7 (499) 700-10-77 | Наталия Наумова |
| 31 | ООО «Гурус Био Венче» | Игорь Тетерин | |
| 32 | Синюшин Константин Станиславович | email: info@theuntitled.net + 7(495) 787-71-77 | |
| 33 | Полевщиков Денис Витальевич | ||
| 34 | ООО «Ом» | k.leonovich@ya.ru +7 (495) 799-24-66 | Константин Леонович |
| 35 | Мартиросян Ваган Ишханович | ||
| 36 | Глушенков Павел Александрович | Pavel.glushenkov@gmail.com +7 (499) 431-86-16 | |
| 37 | Никитин Игорь Валериевич | inikitin@balrobotov.ru +7 (925) 514-88-17 | |
| 38 | Нума Инвест | +7 (495) 268-08-86 | |
| 39 | Вестер Елена | jelena.vester@gmail.com | |
| 40 | ООО «Инновационная Лаборатория» | info@innovationlab.ru +7 (495) 973-37-36 | Ваган Мартиросян |
| 41 | BURAN VENTURE CAPITAL LTD. | +7 (495) 540-4842 | Антон Федоров |
| 42 | ООО «Пульсар Экосистем» | http://pulsar.vc/ dmitry@pulsar.vc +7 (843) 227-40-28 | Дмитрий Шапошников |
| 43 | ООО «Нанотехнологический центр «ТЕХНОСПАРК» | Более не инвестирует | |
| 44 | Волчков Александр Борисович | Volchkov@eastwaycapital.com +7 (925) 507-28-88 | |
| 45 | Демидов Михаил Иванович | Michael@demidov.vc +7(499) 390-88-19 | |
| 46 | ФРИИ | +7 (495) 258-88-77 | |
| 47 | ООО «Тонап Венчур» | +7 (495) 612-24-59, +7 (495) 788-76-08 | |
| 48 | Vesna Investment | http://vesnainvestment.com/info@vesnainvestment.com | Павел Спесивцев |
| 49 | ООО «Венова» | http://venova.ru/ a.komarov@venova.ru +7 (926) 224-55-85 | Александр Комаров |
| 50 | ООО РМГ партнеры | arseniy.dabbakh@rmg-partners.ru +7 (495) 668-13-00 | Арсений Даббах |
| 51 | Черкашин Павел Александрович | pavel@cherkashin.ru + 7 (985) 222-61-41 | |
| 52 | Грибов Сергей | sergey@sergey.com | |
| 53 | Аксенова Мария Дмитриевна | aksenova.md@gmail.com | |
| 54 | Давиденко Вячеслав Юрьевич | vd@alytics.ru | |
| 55 | Prudnikov Alexey Viktorovich | info@waardecapital.com +7 (495) 542-58-58 | Daniil Pyzhlakov |
| 56 | Prostor Capital Fund | apavlyuk@prostor-capital.ru | Antonina Pavlyuk |
Also a good option is to contact an investor who has a similar project in his portfolio or invests in this topic. I used the site rb.ru/company/?niche=119 and chose robotics startups. He analyzed who invested in them and sent them a presentation. This method is suitable for the first touch. It is not a fact that someone takes such emails seriously, but it significantly increases the base of contacts. How to use them is up to you.
Funds in the USA for which we are preparing applications.
- Y combinator
- 500startups
- Plug and play
- Techstars
- Seedcamp
- SOSV
- StartUpBootCamp
- Starta
If you have experience presenting a project in the USA and want to help us with this, write to me on social networks.
Trip to the Dominican Republic in February 2019
“Esto es un robot que collecta las bolas de golf” - I said, because I don’t know how Spanish would be “No, this is not an electro-sheep”, I think it would sound approximately the same for a senior from sunny and fraternal Haiti.
Habroyzer tersuren invited us to the Dominican Republic. So we got the opportunity to test our robot in the winter and not wait until May to work out the algorithms for constructing the trajectory by GPS. At the same time, the tests themselves took place in one of the best golf clubs in the world. We shot a video of the robot working in a golf club, which was very helpful in communicating with investors and demonstrating the robot's capabilities.
vasimv lives and works in the Dominican Republic on a robotic lawnmower. Given the permanent posts in the emigration top, if you are engaged in ROS, robotics or electronics, while thinking about moving your place of residence for a long time, write to tersuren .
Flying with a robot is a whole story. In addition to the robot 1100 * 800 * 300, it was also necessary to somehow transport spare parts, personal belongings. In general, I took a laptop and batteries in a backpack. And personal belongings, gifts from Russia, spare engines, wheels, wires, etc. placed right in the robot, in the ball compartment. You should see the surprised faces of the airport and customs. The robot was taken there several times in the scanner. Ended up in both cases with the question: Is that what? Given the huge inscription HERROBOT on board, it seemed to me that there would be no questions. And so, after all, it’s clear!
Photos from the Dominican Republic

Not without Epic-fail. We rushed to order the board in a resonant manner, so one of the contacts turned out to be confused. He was soldered on snot. Due to humidity, the driver on the wiring worked through time. There could be no question of any testing of algorithms with low-level problems. "Soma grams and no dramas." Then we switched to testing versions on Beaglebone and Ardupilot.
I, overcoming the heat, and Shadow_ruovercoming the cold with a 7-hour difference due to time zones, urgent changes were introduced in the Ardupilot to make it work in new conditions. ESCs, replaced by burned ones, should have been brought up from the online store the day before departure from Russia, but not fate. The existing controllers understood PWM, and beaglebone stubbornly issued only the frequency for the serv. In the end, I had to make a bridge from Arduino. Everything was done in a hurry, but suddenly someone needs a code.
Bridge Sketch for Converting Frequency to PWM
#include
int ch0,ch1,pwm,pwm2;
void setup() {
//Declaring LED pin as output
pinMode(A1, INPUT);
pinMode(A0, INPUT);
pinMode(2, OUTPUT);
pinMode(3, OUTPUT);
pinMode(4, OUTPUT);
pinMode(5, OUTPUT);
pinMode(6, OUTPUT);
pinMode(7, OUTPUT);
Serial.begin(9600);
while (!Serial) {
; // wait for serial port to connect. Needed for Leonardo only
}
}
void loop() {
ch1 =pulseIn(A1, HIGH);
if(ch1<1470){
pwm=(1500-ch1)/2;
analogWrite(7, pwm);
digitalWrite(6,LOW);
digitalWrite(5,HIGH);
}else if(ch1>1530){
pwm=(ch1-1500)/2;
analogWrite(7, pwm);
digitalWrite(6,HIGH);
digitalWrite(5,LOW);
}else{
pwm=0;
analogWrite(7, pwm);
digitalWrite(6,LOW);
digitalWrite(5,LOW);
}
ch0 =pulseIn(A0, HIGH);
if(ch0<1470){
pwm2=(1500-ch0)/2;
analogWrite(4, pwm2);
digitalWrite(3,LOW);
digitalWrite(2,HIGH);
}else if(ch0>1530){
pwm2=(ch0-1500)/2;
analogWrite(4, pwm2);
digitalWrite(3,HIGH);
digitalWrite(2,LOW);
}else{
pwm2=0;
digitalWrite(3,LOW);
digitalWrite(2,LOW);
}
Serial.print("ch0=");
Serial.println(ch0);
Serial.print("ch1=");
Serial.println(ch1);
Serial.print("pwm2=");
Serial.println(pwm2);
for(int i=0; i<255; i++){
delay(5);
}
}
Promo video after the trip
3D rendering video before the trip
Now there is only one competitor in the world and it costs $ 15,000. In the world of 34,000 golf clubs, everyone spends at least $ 1,500 / mass on collecting balls. This is a market of more than $ 600M / year. Our minimum program is the sale and subsequent maintenance of 1000 robots. Even when sold at a price 40% lower than the competitor, this is about $ 8M in revenue.
We have a preliminary agreement with golf clubs interested in testing the robot on their field in Germany, Australia, New Zealand, Sweden and the Dominican Republic. And all this thanks to Habr.
Do you know how to fulfill your dreams and bring your ideas to life? Calm Just close your eyes and enjoy the moment. No Eckhardt Tolle will tell you about the power of the moment, if you scroll through the same thoughts and they do not give you rest. You add details to your project, but don't start doing it. You forget for a while, and then what kind of trigger again causes images of the idea for the dream project. This is exactly what is the reason to start doing. Do not wait for the perfect moment, perfect moment now!
Is such a robot necessary at all? Golf is not so widespread in Russia so far, but we turned to industry experts to find out their opinion. All of them agree that this robot is necessary.
We turned to the leaders of the robotics market in Russia to find out their opinion on service robots for solving routine tasks. This is undoubtedly a trend that is difficult to argue with.
We will refine and promote our robot, because we cannot but do this. To speed up, we need your help and support!
Plans
At the beginning of March we have another pitch planned. Why, if there is already an offer? I don’t know yet, we go as Siddhartha, the path finds us. In March, we need to finalize all the algorithms for full work and start testing golf courses in the Russian Federation in April. In June, participation in the exhibition, publication in European golf publications. Over the summer of 2019, we must make 25 robots and start tests in Germany and the Dominican Republic. In the fall, start selling as a service. And in 2020, enter the US market.
In 2020, release a model of a lawn mower that works on the same algorithm for constructing a trajectory to solve all problems in the driving range.
These are simple milestone, thank you for your support.
Our posts:
- Development of a robot for collecting golf balls
- An attempt to make a robot case with a limited budget. Glass Mat and Epoxy
- Designing a service robot. Problem statement, solution architecture
- ArduPilot for beginners. Install and configure on BeagleBone Blue
- Making a robot case with a limited budget. Vacuum forming
- Service robot navigation on a golf course. Building a path and avoiding obstacles
PS: This robot would not have been if not for Habr .
Only registered users can participate in the survey. Please come in.
Which name to choose?
- 4.6% BallBot 13
- 7.2% HarvyBot 20
- 6.4% Ball Harvester 18
- 14.4% Harvester 40
- 19.1% GolfBot 53
- 7.9% BallEater 22
- 3.9% BallGrabber 11
- 11.5% HerrRobot 32
- 6.4% HerRobot 18
- 0.3% driveRanger 1
- 12.9% Pickmate 36
- 4.6% Gacman 13