The developers of the unmanned "KamAZ" offer to take part in a survey that will shape the ethics of robots

Photo: KAMAZ
As already reported, the KAMAZ company , together with Cognitive Technologies, is developing an unmanned truck. While many car manufacturers are engaged in passenger robotic vehicles, only a few work with trucks - these are KAMAZ, Mercedes, Volvo, and possibly other companies.
As for KAMAZ trucks, domestic drones will soon appear on general roads. For example, in 2016, a test race without a driver will take place on the M11 toll highway Moscow - St. Petersburg. I asked the developers for information about the operation of the control system, and received interesting answers, which can be found in the sequel. By the way, this is the second part of the interview, here is the first .
What is the situation with legislation now - is the government accepting your proposals now? If so, what changes have already been made, and how has this affected the implementation of the unmanned truck project?
Legislative issues are one of the most difficult moments in creating an unmanned vehicle, and not only in Russia, but also in other countries. It is worth saying that this problem has not been completely solved anywhere. The United States made the most progress in its decision, where several states regulate the possibility of moving cars in autopilot mode, in which not only the presence of the driver is necessary, but also the possibility of his intervention in control should be provided.
In Russia, no legislative measures have yet been taken in the field of organizing the movement of unmanned vehicles. Representatives of Cognitive Technologies are currently developing draft legislative initiatives. Their first discussion is scheduled for February 2016.
How realistic is it to use autonomous trucks as an alternative to truckers?
This problem is already under active development. Facilitation of labor and improving traffic safety are important factors affecting the need for its speedy solution. And examples of autonomous metro trains in selected European cities and many major airports around the world provide further evidence that the organization of the mass movement of unmanned vehicles is just around the corner.
In addition, the geographical position of our country, which occupies the territory between Europe and the largest Asian centers, is a tremendous advantage in this. The AutoNet roadmap explicitly states that it is the trans-Eurasian position of the Russian Federation that determines the prospect of using "BPTS of domestic production and a network of high-speed robotic motorways that will form the basis of the logistics system of the Russian Federation and the international transport corridor being created." The annual demand for freight BPTS to meet domestic demand is estimated at more than 70,000 BPTS by 2035.
In addition, legislation is pushing for the early creation of unmanned control technologies by domestic developers who wish to compete successfully in world markets. In Europe, in particular, trucks not equipped with Driver Assistant will be closed from 2018.
What do you think about the problem of choosing an algorithm for an unmanned vehicle if it is impossible to avoid an accident and the victims are inevitable? Have you considered Trolley Problem , and if so, in what context? What decision have you made? Is there a solution to this problem in your opinion?
Cognitive Technologies has begun the formation of scenarios for the behavior of an unmanned vehicle. Indeed, one of the most important problems that developers are forced to solve is the behavior of the autobot in critical situations when it is impossible to avoid an accident and damage to health and even life is inevitable for road users. To determine moral law, which of the road users will have to sacrifice in such cases, Cognitive Technologies, with the support of NUST MISiS, MIPT recently announced a sociological survey among citizens of the Russian Federation.
The company expects to use its results as the main material for the preparation of legislative initiatives regulating the behavior of an unmanned vehicle, both during testing and, subsequently, on public roads. The research is supposed to be carried out for various target groups: youth (from 14 to 30 years), middle (31 - 50 years) and older (over 50). Also, attention will be paid to the difference in the responses of the male and female audience of respondents. It is also intended to consider the difference in responses among individual social groups.
The company has prepared descriptions of typical situations involving an autobot when it is impossible to avoid an accident, in each of which there are 3-4 behaviors. At the same time, the model considered in the study assumes the complete autonomy of the car when driver intervention in the control process is completely excluded. Respondents will need to answer the questions, what, in their opinion, should be the behavior of an unmanned vehicle in each case.
Among them are the following situations.
Situation 1.Suppose an unmanned vehicle moves at a speed of 80 km / h. A dog suddenly appears on the road in front of him. What should an autobot do, realizing that emergency braking is useless in this situation? Continue driving and crushing the dog, violating the rules, threatening to rub your driver’s license, changing lanes, separated by a double continuous marking line or taking a exit to the ditch, realizing that this will lead to imminent global damage to the car and injuries to the autobot driver that are critical for life and health ? (Fig. 1)
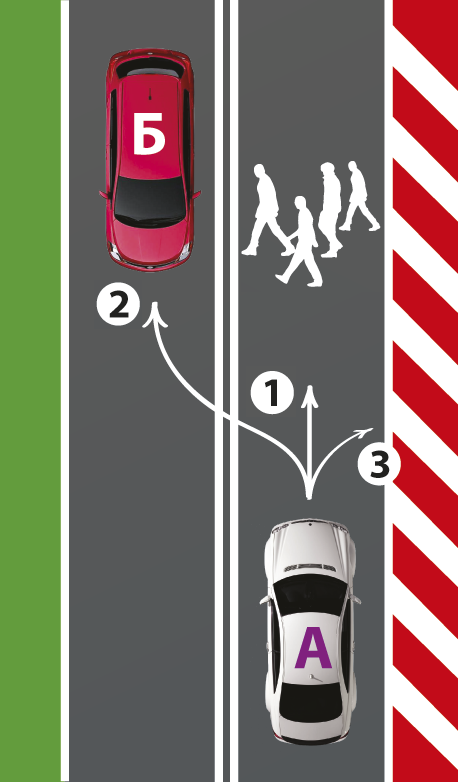
Situation 2.Suppose unmanned vehicle A moves at a speed of 80 km / h. The scenario provides for the sudden appearance of several people on the road in front of him. What should an autobot do, realizing that emergency braking is useless in this situation? Continue driving and hitting people, changing lanes to the oncoming lane, separated by a double solid marking lily on which car B is moving or making a trip to the ditch, realizing that this will lead to imminent global damage to the car and injuries to the autobot driver that are critical for life and health? (Fig. 2.)
 |  |
The situations under consideration are in many ways similar to the well-known trolley problem. The full questionnaire is available at the following address . Anyone can take part in the study. The company expects to summarize its results by the end of January 2016.
Are international companies like Google involved in similar projects interested in the project? If so, what interests them the most?
The project was seriously interested in well-known German automakers. They were primarily interested in the Russian driver assistant model. We received an offer to use our technology on an OEM basis. We did not benefit from such an offer, since it was a one-time sale and, in addition, its price parameters did not suit us.
Google made no suggestions.
Do you know anything about similar projects from China? If so, how far have the Chinese progressed in creating autonomous control systems for their trucks?
Chinese search engine Baidu after Google announced the creation of its own drone "with a high degree of autonomy." Unlike the car developed by Google, according to Baidu, it will not replace the driver, but only become an “intelligent assistant” for him.
It is worth saying that this situation is not unique to China. All the main developers who announced their intention to create an unmanned vehicle are moving towards a solution in stages and the immediate task is not a completely unmanned vehicle, but an analogue of an autopilot that provides partial active control that allows for autonomous control of the lane, maintains active braking, and the distance to the front car etc.
The concept of a new car can be introduced by the Chinese at the end of this or next year.
How much progress have Avtodor negotiations with the Chinese and Europeans regarding the launch of unmanned road trains along the Europe-China corridors?
To create a high-speed road corridor from Europe to China, a major interstate project is being implemented today, providing for the possibility of unmanned road train movements, which involves a number of countries, including Russia, Kazakhstan and China.
Its name is " Europe-Western China Highway." One of its elements is the creation in the period 2016-2018 of a pilot site on the M11 Moscow – St. Petersburg highway for testing unmanned vehicles. This event, in particular, is indicated in the AutoNet group roadmap within the framework of the National Technology Initiative of the Agency for Strategic Initiatives.
The Avtodor Group of Companies and the Ministry of Transport of Russia are involved in the development of the project.
Kazakhstan plans to complete the scope of work assigned to it in 2016. China has almost completed its work.
In full, the Russian part of the route with a length of more than 9,000 km is expected to be completed by 2020 .
How far has the project to create a testing ground for drones in the Republic of Tatarstan progressed?
Tatarstan has made an application for the construction of such a site. Its working title is Valley of Robots.". But since in the process of work and discussion the issue was transformed into a much broader one compared to what was previously expected, today we are talking not only about the republican, but also about the all-Russian and even international project of a platform for running the latest innovative machines, with all the necessary elements smart city. His decision passed into the competence of the leadership of the Republic of Tatarstan. It is expected in the near future.
Terminator in the second part (Terminator 2) was driving a car with the headlights off. And what about you? Does the robot really need headlights? In the optical range, IR or some other?
When driving in the daytime, the robot does not need the headlights, but they must be switched on, according to the requirements of the SDA. Video cameras (stereo pairs) operating in the visible range are an important component of the sensor package in low light conditions. For them, the work of headlights in such conditions is necessary. In this sense, the unmanned KAMAZ can be equipped with additional lighting, similar to how it was done on models participating in the Paris-Dakkar rally.
For other active sensors (radars, lidars) that have “their own backlight”, headlights are not needed.
When do you think autonomous cars will become a mass phenomenon on the roads? Will this happen in 3 years, 5 years?
This will happen no earlier than by 2025. As already mentioned, the task of creating a fully autonomous car that can move on public roads is being solved in stages. A massive appearance on the roads of cars with certain autopilot functions (the presence of a driver behind the wheel will be mandatory, and all responsibility for the consequences of the car’s movement will remain on it) is expected in the next 3-5 years.
In a sense, the situation will be similar to the operation of an autopilot of an airplane, which took place in the very recent past, when takeoff, landing, control in turbulence and other difficult situations were carried out manually, but otherwise, the airplane was controlled by autopilot. (Today already some of the listed modes work autonomously).
However, the main reason preventing the mass appearance of fully autonomous cars on the world's roads is not technical, but social and legislative. Its solution is expected, probably, by the middle of our century.