The Magic of Tensor Algebra: Part 12 - Rodrigue-Hamilton Parameters in Solid State Kinematics
Content
- What is a tensor and why is it needed?
- Vector and tensor operations. Tensor Ranks
- Curvilinear coordinates
- The dynamics of a point in tensor exposition
- Actions on tensors and some other theoretical questions
- Kinematics of a free solid. The nature of angular velocity
- The final rotation of a solid. Properties of the rotation tensor and method of its calculation
- On convolutions of the Levi-Civita tensor
- The derivation of the angular velocity tensor through the parameters of the final rotation. Apply the head and Maxima
- We get the angular velocity vector. Working on shortcomings
- Acceleration of a body point in free movement. Angular acceleration of a solid
- Rodrigue Hamilton Parameters in Solid State Kinematics
- SKA Maxima in problems of transformation of tensor expressions. Angular velocity and acceleration in the parameters of Rodrigue Hamilton
- Non-standard introduction to the dynamics of a rigid body
- Proprietary Solid Motion
- Properties of the inertia tensor of a solid
- Sketch of a nut Janibekova
- Mathematical modeling of the Janibekov effect
Introduction
Finally, we came to a rather interesting topic - the choice of parameters that uniquely determine the orientation of a rigid body in space. Historically, the most popular are rotation angles - they are primarily mentioned in classical textbooks of theoretical mechanics.
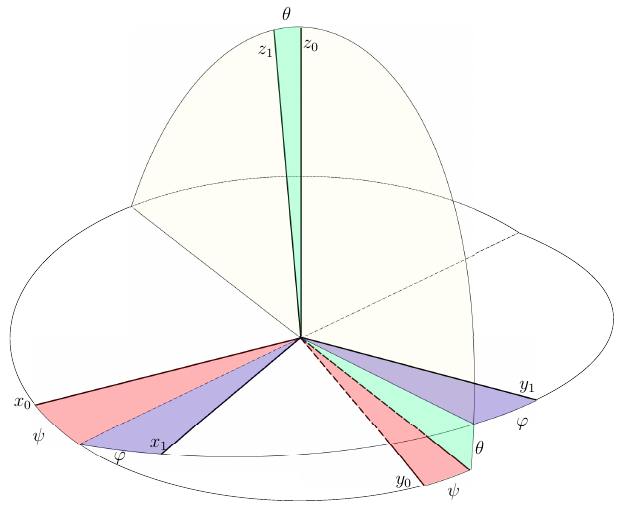
Fig. 1. Euler angles are parameters that are familiar to anyone involved in computer graphics and modeling the spatial motion of bodies. And everyone they know knows how problematic their use is.
Typically, rotation angles are used in conjunction with the Cartesian coordinate system, and it is said that the associated coordinate system can be combined with the base by three successive rotations around its axes. In this case, each subsequent rotation is carried out around the axis obtained after the previous rotation. In addition, the next turn should not take place around the axis relative to which the previous turn was made. In this regard, there are 12 different combinations of rotation angles, the most famous of which are Euler angles (Figure 1). The base coordinate system is rotated by an angle
The use of Euler angles is good for everyone - their number coincides with the number of rotational degrees of freedom of a rigid body, which means that they do not generate redundant constraint equations. But, without even resorting to cumbersome formulas, according to Figure 1, you can guess where the problem lies.
Fig. 2. Famous kinematic equations of Euler. I, in due time, drank long and painstaking debugs with them.
There are two values of the nutation angle at which the Euler kinematic equations degenerate (Figure 2) -
NaNin phase coordinates. They arrived, the integration procedure collapsed. Another option for turning angles is airplane angles:
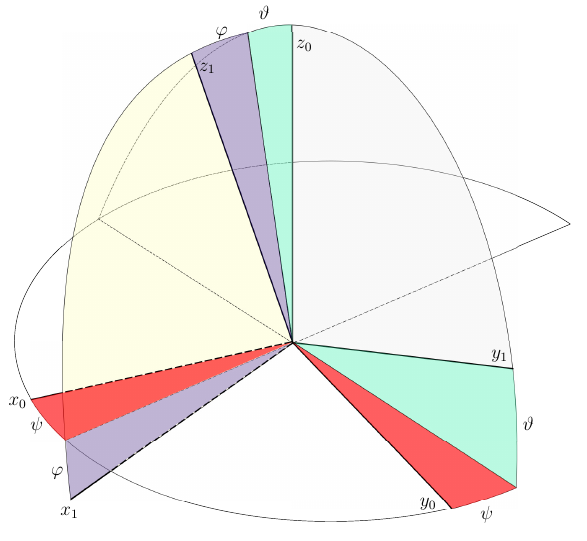
Fig. 3. Aircraft angles - one of the practical ways to determine the orientation of an aircraft in space.
These rotation parameters degenerate during pitch
All possible combinations of rotation angles are degenerate. For modeling and bookmarking orientation control system algorithms, their scope is limited to critical parameter values. In the last article, we showed that the parameters of the final rotation are also not suitable, and the use of the components of the rotation tensor itself is hampered by excessively deep dependencies between them, which generates a high order of the system of equations of motion.
However, the great Leonard Euler introduced four parameters that have no degeneracy. The then scientific world did not pay much attention to his publication on this subject. This idea, regardless of Euler, was developed by Olid Rodrigue, and in the works of William Hamilton received the final theoretical justification. Meet -
1. Quaternions and actions on them
A quaternion is a number of the form
where they
So, the multiplication of quaternions is reduced to the algebraic operation of multiplying the sums, with the only difference being that it is necessary to determine the rules for the multiplication of imaginary units. Traditionally, each of the imaginary units squared gives -1
and their pairwise products are well described by the diagram
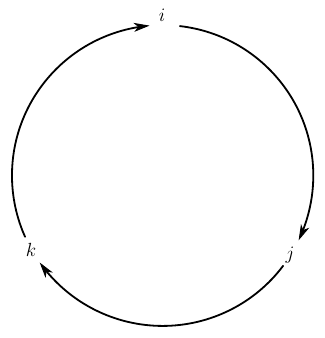
Fig. 4. The diagram of the multiplication of imaginary units in a quaternion, the
meaning of which is simple - if you multiply pairs of imaginary units in the order indicated by the arrow, you get the third imaginary unit with a "+" sign. If you change the order of multiplication to the opposite, you get the third imaginary unit with the sign "-". Doesn’t resemble the rule of vector multiplication of unit vectors in Cartesian coordinates? This is it, that is, we get
Using these rules, we multiply two quaternions
Wow! Not weakly, but we boldly cite similar terms
and, well, for sure you see painfully familiar actions on vectors here. Let us have vectors
then each quaternion can be represented as a scalar-vector pair
and the result of their multiplication
It is not difficult to simply compare this formula with the result of the multiplication that we performed, while considering the imaginary units as the orts of the Cartesian basis. Thus, quaternions include vectors of three-dimensional space, and for example, quaternions of the form
A kind of quaternions
gives a scalar, with a minus sign, and a vector product of their vectors.
Due to the presence of vector multiplication as a result of the product, the operation of quaternion multiplication is not commutative
Well, is it necessary to say that zeroing out the last two coefficients of each of the quaternions we get the product of complex numbers? I think it’s not worth it, because we do not plunge into the complex field, and if we are talking about complex numbers, then where it is required.
I will not begin to say that the addition of quaternions and multiplying them by the number is similar to the corresponding operations in the complex domain. But what you need to talk about, so about pairing a quaternion
about the related norm calculation operation
and inverse quaternion calculation operations
And another useful property regarding the conjugation of a quaternion product
In addition, the norm of the inverse quaternion is the reciprocal of the norm of the original
These operations are directly related to why today hypercomplex numbers are used.
2. Quaternion as a linear rotation operator
Now let's look at such a trick. Let it be
The transformation of the speciesdoes not change the quaternion norm
.
This statement is verified by direct calculation.
Indeed, the quaternion norm does not change with such a transformation. And if the quaternion
The value in brackets is called the quension tensor (not to be confused with the tensor!). Exercise over its vector part
Nobody bothers us to make equivalent transformations, so we do them. Now introduce the replacement
On what basis? Yes, on the fact that the sum of the squares of these quantities will always give unity, and if so, then no one bothers to present these quantities as the sine and cosine of a certain angle. Why is the angle divided by two? We want it so much, then it will come in handy for us, because the angle can be taken arbitrary. Based on the introduced replacement, we can rewrite the quaternion in the form
Note that the vector
To top it off, let us allow one more assumption - let the quaternion be single, i.e.
Now we carefully perform the orthogonal transformation over the vector quaternion
Now multiply the result (2) by the inverse quaternion
In order not to clutter up the text with “crocodiles”, we calculate separately the scalar
and vector part
conversion result. Ultimately, on the basis of formulas (3) and (4), having performed not complicated trigonometric simplifications, we conclude that the output is a vector
So this is ... Rodrigue's final rotation formula! It turns out that the conversion
which, taking into account the fact that for a single quaternion, the operation of calculating the inverse quaternion is equivalent to conjugation, can be rewritten as
equivalent to rotating the vector around an axis defined by the unit vector
conclusions
We made sure that a single quaternion, whose components are constructed according to the formulas
determines the final turn. The four parameters that we have cited are the very Rodrig-Hamilton parameters that uniquely determine the orientation of a rigid body in space and do not degenerate for any rotation parameters. For example, if we zero the rotation angle, then the unit vector of the rotation axis also becomes zero. When turning at any final angle, we can always calculate the position of the axis of rotation.
Well, in the meantime it dawned outside ... The outline of this article was slightly different, and we did not say a word about tensors. Yes, it’s for the better, but now we have a clear idea of what tricky orientation parameters we will use in the future.
Thank you for attention!
To be continued...