rusEfi car control unit: once again improved iron
Four months ago, we made the Frankenstein board , which we had high hopes for - on a single board there were six functional units, this was a step forward.
Volunteers in Canada and Slovakia were able to start their motors, but in general, hopes were not realized:
with a total circulation of 40 pieces, only one person in Thailand could solder the board on their own .
It turned out that we are still far from the people - the bet on the cheapness of the board due to the restriction of 10 by 10 centimeters did not play. Yes, the board is very cheap - but due to the very limited functionality: there was no room even for the 5-volt converter, which some sensors and the processor need. At the same time, surface mounting scares many - so in parallel we began to learn how to assemble boards in China.
We decided to make a new board. This time we decided to hit the other extreme: add everything that fits on the board.
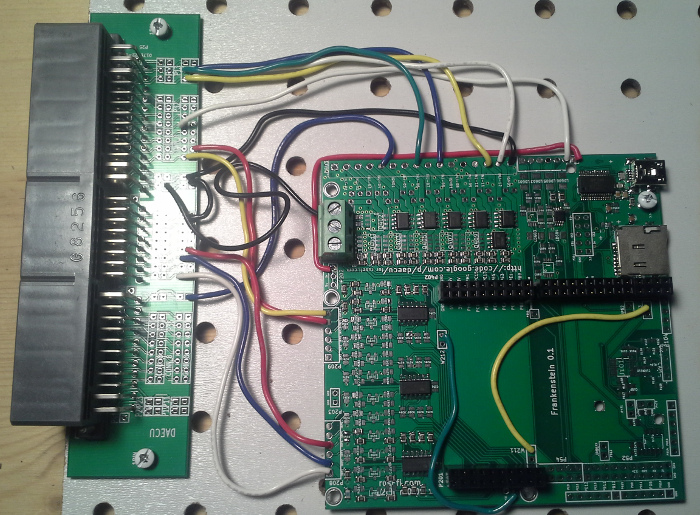
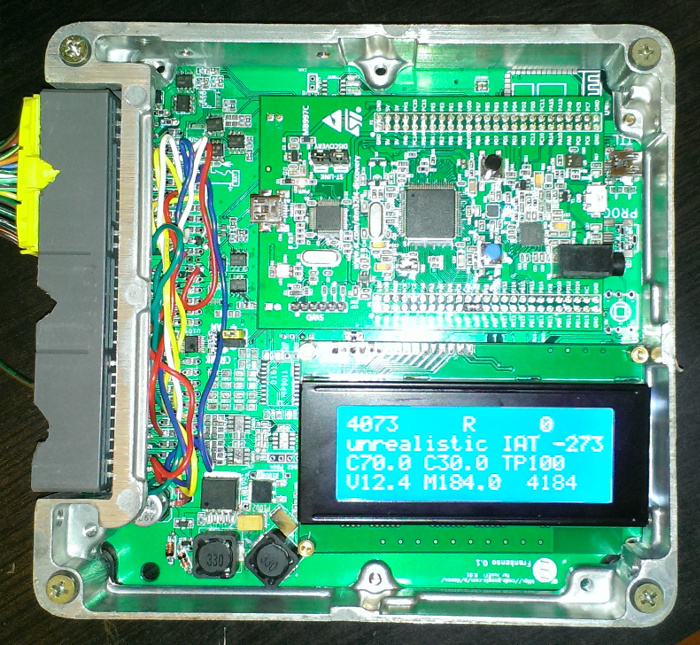
So, we chose a sports car popular with tuners - the Mazda MX-5 Miatu, and made a Plug & Play board for it: the board is inserted into the original old case. The board has the same connector as the factory unit, and pinout. On Frankenzo's boardfit the power supply, the knock sensor decoder, several decoders of thermocouples. Here we went to the stand and added a 20x4 text screen, a joystick and a bluetooth module.
Discovery board in the control unit, of course, should not be used. On the other hand, soldering the stm32 chip with its small legs is not a gift, we made Frankenzo universal in this regard: anyone who wants can solder everything directly to Frankenzo. Who does not want or cannot, can continue to use Discovery.

Honestly, in the current revision of the board, we made a mistake and connected the VDD network of the processor at 5 volts instead of 3.3 volts, so version 0.1 actually works only with discovery. This has already been fixed for version 0.2 - but we have not ordered this version yet.
As with Frankenstein, Frankenzo will clearly face the problem of the inaccessibility of specific components in the Russian Federation / CIS - sets of components for self-assembly should solve this problem , the first pair of such sets is now going to St. Petersburg, we wish them to become working boards there.
From the firmware news for the last four months: firstly, there appeared Speed Density mode for calculating fuel supply. Secondly, the Windows version of the firmware logic appeared - due to the presence of Win32 “drivers” in ChibiOS / RT, the same source codes are compiled into a regular .exe - which can be connected via TCP / IP using both rusEfi control protocols. Those. we run .exe, raise the virtual COM port in TCP - and look in the logical analyzer of our console how the firmware reacts to changing parameters and generally processes the signals - details are here .
Actually continuous automatic testing of this simulator is one of the levels of code testing.
Actually, that’s all the news. Several mini-factories ordered themselves the assembled boards - I hope that a sufficient pool of testers will be collected and the code will be written to a lesser extent on the table. And the code is still to be written and written - now according to the plan , the signal processing from the knock sensor is next.
Volunteers in Canada and Slovakia were able to start their motors, but in general, hopes were not realized:
with a total circulation of 40 pieces, only one person in Thailand could solder the board on their own .
It turned out that we are still far from the people - the bet on the cheapness of the board due to the restriction of 10 by 10 centimeters did not play. Yes, the board is very cheap - but due to the very limited functionality: there was no room even for the 5-volt converter, which some sensors and the processor need. At the same time, surface mounting scares many - so in parallel we began to learn how to assemble boards in China.
We decided to make a new board. This time we decided to hit the other extreme: add everything that fits on the board.
So, we chose a sports car popular with tuners - the Mazda MX-5 Miatu, and made a Plug & Play board for it: the board is inserted into the original old case. The board has the same connector as the factory unit, and pinout. On Frankenzo's boardfit the power supply, the knock sensor decoder, several decoders of thermocouples. Here we went to the stand and added a 20x4 text screen, a joystick and a bluetooth module.
Discovery board in the control unit, of course, should not be used. On the other hand, soldering the stm32 chip with its small legs is not a gift, we made Frankenzo universal in this regard: anyone who wants can solder everything directly to Frankenzo. Who does not want or cannot, can continue to use Discovery.
Honestly, in the current revision of the board, we made a mistake and connected the VDD network of the processor at 5 volts instead of 3.3 volts, so version 0.1 actually works only with discovery. This has already been fixed for version 0.2 - but we have not ordered this version yet.
As with Frankenstein, Frankenzo will clearly face the problem of the inaccessibility of specific components in the Russian Federation / CIS - sets of components for self-assembly should solve this problem , the first pair of such sets is now going to St. Petersburg, we wish them to become working boards there.
From the firmware news for the last four months: firstly, there appeared Speed Density mode for calculating fuel supply. Secondly, the Windows version of the firmware logic appeared - due to the presence of Win32 “drivers” in ChibiOS / RT, the same source codes are compiled into a regular .exe - which can be connected via TCP / IP using both rusEfi control protocols. Those. we run .exe, raise the virtual COM port in TCP - and look in the logical analyzer of our console how the firmware reacts to changing parameters and generally processes the signals - details are here .
Actually continuous automatic testing of this simulator is one of the levels of code testing.
Actually, that’s all the news. Several mini-factories ordered themselves the assembled boards - I hope that a sufficient pool of testers will be collected and the code will be written to a lesser extent on the table. And the code is still to be written and written - now according to the plan , the signal processing from the knock sensor is next.